一种狭小空间作业的穿戴式连续型柔性外肢体机器人
1.本发明涉及机器人技术领域,尤其是一种狭小空间作业的穿戴式连续型柔性外肢体机器人。
背景技术:
2.随着经济和科技的不断发展,各式各样的机器人应运而生,应用于各行各业服务人类。其中外肢体机器人不同于协助机器人和外骨骼机器人,它既依附于人体又独立于人体,既可以同步跟随人体肢体的动作姿态,又能够实现自身的独立作业。面对复杂的作业环境和任务要求,外肢体机器人能够根据现场的情况制定出不同的工作状态,并协助人们完成复杂的作业任务。例如在狭小空间完成装配任务,大型协助机器人无法进入,但步骤繁多的装配任务单靠作业者的双手无法完成,此时外肢体机器人就能够帮助作业者完成抓取和支撑动作,降低了作业难度,提高了工作效率;当进行危险化工产品作业时,外肢体机器人能够代替作业者的双臂进行操作,以保护作业人员的人身安全。同时,在康复保健领域也有着广阔的应用前景,可为有着手臂运动障碍的人提供额外协助,如开门、取物等等日常操作。
3.现有的外肢体机器人结构中,功能方面还是显得比较单一,比如一种人体运动辅助两用式外肢体机器人,是一种可以辅助人们行走又可以抓取物体的机器人,可为使用者提供诸多便利,但该机器人结构中只有一个机械臂,难以应对更为复杂的作业环境;还有如肩部可穿戴功能辅助机械臂,属于一种康复类机器人,可协助人们完成日常生活、工作的需求,且具备完善的人机交互功能,但该类机器人由于使用环境不同,视觉传感器一般安装在头顶上方,在低矮环境中一定程度上限制了活动范围。
技术实现要素:
4.本发明要解决的技术问题是:为了克服现有技术中之不足,本发明提供一种狭小空间作业的穿戴式连续型柔性外肢体机器人,通过采用连续型结构的机械臂,实现操作的轻便性且具有更好的空间可达性,有效提高面对狭小空间复杂作业时的工作效率。
5.本发明解决其技术问题所采用的技术方案是:一种狭小空间作业的穿戴式连续型柔性外肢体机器人,包括背部支撑板,所述的背部支撑板左右两侧分别安装有机械臂,背部支撑板的上端部安装有视觉传感器,背部支撑板的背面安装有驱动电机模块、驱动控制模块和电源模块。
6.所述的背部支撑板为正面呈s型的菱形镂空状结构,背部支撑板的上端部两侧分别具有安装机械臂的支撑平台,背部支撑板背面上端安装有两组、每组四个呈阶梯式分布的电机架,背部支撑板背面中部具有中部凹槽,电源模块和控制驱动模块嵌设安装于背部支撑板背面的底部。
7.所述机械臂:包括由多个关节盘活动连接形成的连接骨架所构成的机械臂本体,所述的机械臂本体外包裹有内充填有eps颗粒的气囊,贯穿整个机械臂本体穿设有支撑芯
柱,连接骨架后端连接在支撑平台上。
8.所述的连接骨架包括对应人体大臂的第一关节、对应人体小臂的第二关节,连接骨架前端安装有对应人体手部的机械爪,连接骨架后端与背部支撑板左右两侧固连,位于第二关节前端的机械爪通过电机带动丝杠连杆机构实现抓取动作。
9.所述的关节盘两端分别为可相互铰接而构成连接骨架的球头和球壳,其中形成第一关节的关节盘外周具有两个为一组、共四组以九十度分布的绳孔,位于外侧的绳孔用于穿过拉动第一关节的驱动绳索,位于内侧的绳孔用于穿过拉动第二关节的驱动绳索;形成第二关节的关节盘外周具有四个用于穿过拉动第二关节的驱动绳索的绳孔。
10.所述视觉传感器:具有安装于背部支撑板顶部的运动平台,运动平台的前端部安装有摄像头;
11.所述的背部支撑板的顶部安装有两个驱动电机,所述驱动电机连接有四根控制运动平台运动状态的绳索,所述绳索通过套索连接到运动平台底部,所述摄像头安装于运动平台前端并与驱动控制模块的主控芯片信号连接。
12.所述驱动电机模块:包括驱动电机组,驱动电机组的电机轴上安装有绕线轮,单个电机的绕线轮连接有两条对偶的驱动绳索,所述驱动绳索分别与第一关节和第二关节的末端相连以驱动机械臂动作;
13.所述的驱动电机组模块包括八个无刷直流电机和电机驱动板,所述电机驱动板安装在背部支撑板的中部凹槽内,无刷直流电机安装于电机架内,所述绕线轮安装在所述无刷直流电机的电机轴顶部,每个无刷直流电机上的绕线轮上连接有两条对偶的驱动绳索,驱动绳索通过支撑平台侧面及底部的套索分别与第一关节和第二关节末端的关节盘相连。
14.所述驱动控制模块:包括主控芯片和安装在人体手臂上与主控芯片线路相连的肌电传感器。
15.本发明的有益效果是:本发明中的机械臂采用连续型结构,相比于传统机械臂拥有更好的空间可达性,机械臂采用驱动绳索拉动,使得核心控制部件与机械臂相隔离,能够有效保护核心部件,且减轻机械臂的负荷;视觉传感器能够实现360
°
的旋转和90
°
的弯曲,便于探查周围环境,从而为机械臂提供规划路径,保障作业安全;驱动电机模块全部置于背部支撑板背后,背部支撑板前部能够贴合人体背部轮廓,提高穿戴体验感。
附图说明
16.下面结合附图和实施例对本发明进一步说明。
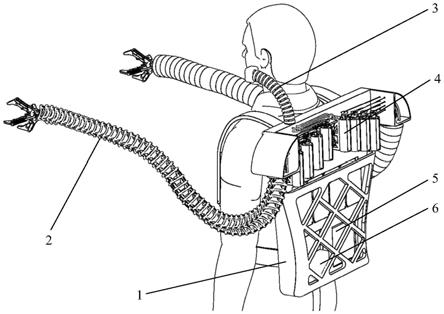
17.图1是本发明穿戴在人体上的后视结构示意图。
18.图2是本发明穿戴在人体上的正视结构示意图。
19.图3是本发明的正面结构示意图。
20.图4是本发明的背面结构示意图。
21.图5是本发明所述驱动电机模块的结构示意图。
22.图6是本发明所述机械臂本体的结构示意图。
23.图7是本发明所述连接骨架的弯曲示意图。
24.图8是本发明所述视觉传感器的结构示意图。
25.图中:
26.1.背部支撑板,1-1.肩带,1-2.支撑平台,1-3.电机架;
27.2.机械臂,2-1.机械臂本体,2-2.连接骨架,2-3.气囊,2-4.支撑芯柱,2-5.机械爪,2-6.关节盘,2-7.球头,2-8.球壳;
28.3.视觉传感器,3-1.运动平台,3-2.摄像头,3-3.驱动电机,3-4.绳索;
29.4.驱动电机模块,4-1.无刷直流电机,4-2.绕线轮,4-3.电机驱动板,4-4.套索,4-5.驱动绳索;
30.5.驱动控制模块,5-1.主控芯片,5-2.肌电传感器,5-3.蓝牙手柄;
31.6.电源模块。
具体实施方式
32.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
33.如图1~图8所示的一种狭小空间作业的穿戴式连续型柔性外肢体机器人,包括背部支撑板1,所述的背部支撑板1左右两侧分别安装有机械臂2,背部支撑板1的上端部安装有视觉传感器3,背部支撑板1的背面安装有驱动电机模块4、驱动控制模块5和电源模块6。
34.所述背部支撑板1为菱形镂空状结构,其正面呈s型,能够更好地贴合人体背部轮廓,菱形镂空可实现背部支撑板1的轻量化,背部支撑板1的正面两侧分别安装有肩带1-1,背部支撑板1的上端部两侧分别具有安装机械臂2的支撑平台1-2,背部支撑板1背面上端安装有两组、每组四个呈阶梯式分布的电机架1-3,背部支撑板1背面中部具有中部凹槽,背部支撑板1背面底部具有底部凹槽,电源模块6和驱动控制模块5嵌设安装于所述底部凹槽内。背部支撑板1还配有镂空后盖板,在保护核心部件的同时有效提高装置的散热性能。
35.所述的机械臂2:由一体结构的连接骨架2-2所组成的机械臂本体2-1,所述的机械臂本体2-1外包裹有内充填有eps颗粒的气囊2-3,其较好的形变性能和较轻的质量使得在提高机械臂2刚度的同时,不会影响机械臂2的运动性能。所述连接骨架2-2的中心具有通孔,通孔内安装有贯穿整个机械臂本体2-1的支撑芯柱2-4。所述连接骨架2-2包括对应人体大臂的第一关节、对应人体小臂的第二关节,连接骨架2-2前端安装有对应人体手部的机械爪2-5,连接骨架2-2后端与背部支撑板1左右两侧的支撑平台1-2固连。
36.单个机械臂2由四个无刷直流电机4-1控制,每两个无刷直流电机4-1控制一个关节的运动,第一关节、第二关节均可实现偏转和弯曲两个自由度的运动,单个机械臂2拥有四个自由度,所述的机械爪2-5通过电机带动丝杠连杆机构实现抓取动作。
37.所述的连接骨架2-2由多个关节盘2-6活动连接形成,关节盘2-6两端分别为可相互铰接而连接成所述连接骨架2-2的球头2-7和球壳2-8,其中形成第一关节的连接骨架2-2的关节盘2-6的盘体外周具有两个为一组、共四组八个以九十度分布的绳孔,位于外侧的绳孔用于穿过拉动第一关节的驱动绳索4-5,位于内侧的绳孔用于穿过拉动第二关节的驱动绳索4-5,以避免两个关节的驱动绳索4-5之间相互影响;形成第二关节的关节盘2-6外周具有四个绳孔,用于穿过拉动第二关节的驱动绳索4-5。
38.所述的驱动控制模块5包括主控芯片5-1、肌电传感器5-2和蓝牙手柄5-3,肌电传感器5-2安装在人手臂上,并与主控芯片5-1相连,与蓝牙手柄5-3协同控制机械臂2的运动。
39.所述驱动电机模块4:包括八个无刷直流电机4-1、绕线轮4-2、电机驱动板4-3及套
索4-4,所述电机驱动板4-3安装在背部支撑板1的中部凹槽内,无刷直流电机4-1安装于电机架1-3内,所述绕线轮4-2安装在所述无刷直流电机4-1的电机轴上,每个无刷直流电机4-1上的绕线轮4-2上连接有两条对偶的驱动绳索4-5,驱动绳索4-5通过支撑平台1-2侧面及底部的套索4-4分别与第一关节和第二关节末端的关节盘2-6相连。
40.根据具体作业任务的需要,判断机械臂2的运动模式,然后通过主控芯片5-1读取相应模式对应的肌电传感器5-2和蓝牙手柄5-3的运动意图,向电机驱动板4-3发送数据信号,电机驱动板4-3再进一步控制各个无刷直流电机4-1的运转,最终实现对机械臂2的运动控制。
41.所述视觉传感器3:具有安装于背部支撑板1顶部的运动平台3-1,运动平台3-1的前端部安装有摄像头3-2;所述的背部支撑板1的顶部安装有两个驱动电机3-3,所述驱动电机3-3连接有四根控制运动平台3-1运动状态的绳索3-4,所述绳索3-4连接到运动平台3-1底部,所述摄像头3-2安装于运动平台3-1前端并与驱动控制模块5的主控芯片5-1信号连接。通过驱动电机3-3能够实现运动平台3-1作360
°
旋转和90
°
弯曲的运动,从而使得摄像头3-2能够实现对外部环境全方位的探查,并将返回画面经过视觉分析与数据处理,计算出机械臂2运动的最优路径,最终完成避障动作。
42.本发明提出的一种狭小空间作业的穿戴式连续型柔性外肢体机器人,具有两种控制模式,使其具备更完善的人机交互功能,分别为跟随运动模式和独立运动模式。跟随运动模式:通过肌电传感器5-2识别人体手臂的运动姿态,然后通过控制驱动电机模块4使机械臂2运动成人体手臂相同姿态;独立控制模式:通过蓝牙手柄5-3实现对机械臂2不同位姿的控制。本发明具有实用、高效、安全的特点,能够再面对狭小空间复杂作业任务时,根据任务要求改变不同的控制模式,且较好的空间可达性能够实现多方位的作业,并且具有良好的避障性能,从而能够缩短作业任务的时间,降低人的作业强度,有效提高复杂作业的效率。
43.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1