一种基于数字孪生的机器人系统的制作方法
本发明涉及机器人控制,特别是指一种基于数字孪生的机器人系统。
背景技术:
1、传统的设备巡检机器人因其不能将巡检结果以及自己的运行状态,位置等信息用三维可视化的方式呈现出来,导致中心机房的管理者不清楚机器人的运行状况,位置,只能去现场查看,此外还有机器人不能读取bim数据,不能与设备进行数据交互,不能远程操控设备。以上种种都限制了机器人的应用场景,例如机器人在恶劣环境下,如在辐射,噪音,高温,高湿等环境,有毒,有粉尘的现场巡检时,常常需要人工去现场确认它的运行状态,如位置,电量,角度等。这就严重影响了巡检人员的身体健康。
2、例如,中国专利申请cn 111438677 a中公开了一种无人值守机房巡检机器人,可以预设的巡检时间和巡检点,对机房内设备进行自动巡检监测,并实现远程控制机器人。中国专利申请cn113472079 a提供了一种配电站运维监控云机器人系统、后台处理及作业任务方法。运维监控系统,与云机器人终端以及云端资源库,共同构成了配电站云机器人系统架构,将云计算和智能机器人等技术与配电站作业任务融合。
3、其中,中国专利申请cn 111438677 a中没有云端机器人的概念,真实机器人只能用摄像头读取有限的设备数据,不能与设备交互读取设备的空间数据,因而限制了其应用场景。而cn 113472079 a中需要word格式的操作票传入系统,经语义解析将其内容翻译为机器人可以识别并执行操作的语言。这样也限制了其应用场景。并且,以上2个专利申请中的机器人都不能访问bim数据,也不能将真实机器人的位置信息和巡检结果在虚拟空间中显示,因而限制了其应用场景。
技术实现思路
1、本发明要解决的技术问题是提供一种基于数字孪生的机器人系统,为机器人设备巡检提供数字孪生,扩大机器人的应用场景,保护巡检人员的健康。
2、为解决上述技术问题,本发明的实施例提供技术方案如下:
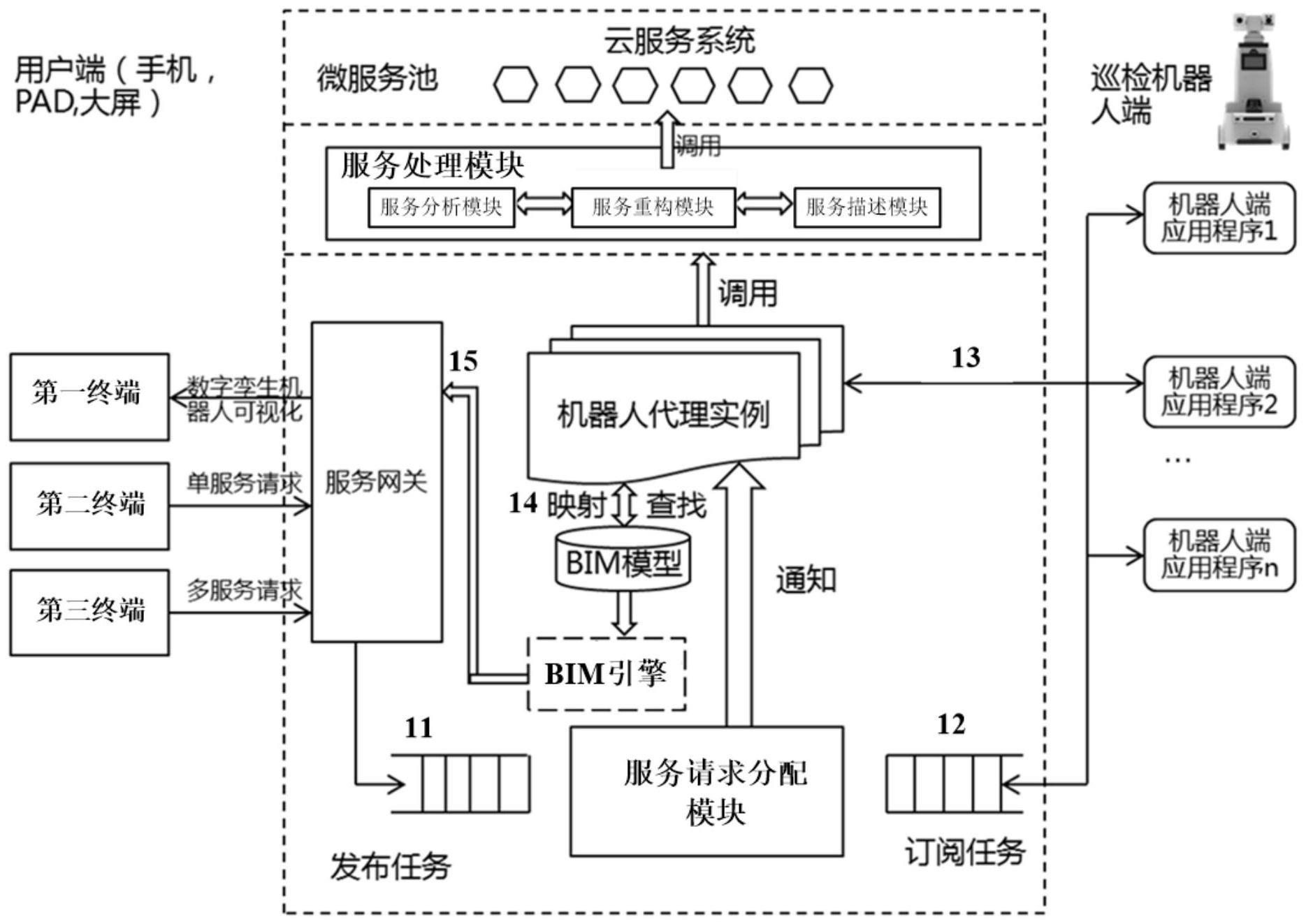
3、一种基于数字孪生的机器人系统,包括:服务网关、建筑信息建模bim模型、bim引擎模块和至少一个机器人代理实例,其中:
4、所述bim模型,用于构建物理空间对应的虚拟空间;
5、第一机器人代理实例,用于接收对应的第一巡检机器人的自身状态信息,将所述自身状态信息转换为所述虚拟空间中的第一虚拟状态信息,并将所述第一虚拟状态信息映射到所述虚拟空间中的第一数字孪生机器人,构建得到所述第一巡检机器人在所述虚拟空间中的数字孪生机器人;
6、所述bim引擎模块,用于对所述虚拟空间中的第一数字孪生机器人进行可视化处理,生成第一图像数据;
7、所述服务网关,用于将所述第一图像数据发送给第一终端,以在第一终端侧显示所述第一数字孪生机器人。
8、可选的,所述机器人系统还包括:服务请求分配模块、微服务池和服务处理模块,其中:
9、所述服务网关,还用于接收第二终端发送的第一服务请求,将所述第一服务请求保存在服务请求消息队列中;
10、服务请求分配模块,用于读取所述服务请求消息队列中的第一服务请求,分配并启动处理所述第一服务请求的第二机器人代理实例,以及,生成所述第一服务请求的第一订阅任务,所述第一订阅任务用于订阅所述第二机器人代理实例所对应的第二巡检机器人发布的第一现场状态信息;
11、所述第二机器人代理实例,用于将所述第一服务请求发送给所述服务处理模块,接收所述服务处理模块返回的可执行的第一微服务列表,并将所述第一微服务列表发送给所述第二机器人代理实例所对应的第二巡检机器人,以使所述第二巡检机器人执行所述第一微服务列表中的微服务;
12、所述服务处理模块,用于分析所述第一服务请求,通过调用所述微服务池中的微服务,将所述第一服务请求转换为可执行的第一微服务列表。
13、可选的,所述第二机器人代理实例,还用于接收所述第二巡检机器人发布的第一被检设备的第一现场状态信息,并将所述第一被检设备的第一现场空间坐标转换为所述虚拟空间中的第一数字孪生设备的第一虚拟空间坐标,并将所述第一现场状态信息映射到所述第一数字孪生设备;
14、所述bim引擎模块,还用于根据所述第一现场状态信息和所述第一虚拟空间坐标,对所述第一数字孪生设备进行可视化处理,生成第二图像数据;
15、所述服务网关,还用于将所述第二图像数据发送给第二终端,以在第二终端侧显示所述第一数字孪生设备。
16、可选的,所述服务网关,还用于接收第三终端发送的第二服务请求,将所述第二服务请求保存在服务请求消息队列中;
17、服务请求分配模块,还用于读取所述服务请求消息队列中的第二服务请求,分配并启动处理所述第二服务请求的多个机器人代理实例,以及,生成所述第二服务请求的第二订阅任务,所述第二订阅任务用于订阅所述多个机器人代理实例所对应的多个巡检机器人发布的第二现场状态信息;
18、所述多个机器人代理实例中的每个机器人代理实例,用于将所述第二服务请求发送给所述服务处理模块,接收所述服务处理模块返回的可执行的第二微服务列表,并将所述第二微服务列表发送给本机器人代理实例所对应的巡检机器人,以使所述巡检机器人执行所述第二微服务列表中的微服务;
19、所述服务处理模块,还用于分析所述第二服务请求,通过调用所述微服务池中的微服务,将所述第二服务请求转换为可执行的第二微服务列表。
20、可选的,所述多个机器人代理实例中的每个机器人代理实例,还用于接收对应的巡检机器人发布的第二被检设备的第二现场状态信息,并将所述第二被检设备的第二现场空间坐标转换为所述虚拟空间中的第二数字孪生设备的第二虚拟空间坐标,并将所述第二现场状态信息映射到所述第二数字孪生设备;
21、所述bim引擎模块,还用于根据所述第二现场状态信息和所述第二虚拟空间坐标,对所述第二数字孪生设备进行可视化处理,生成第三图像数据;
22、所述服务网关,还用于将所述第三图像数据发送给第三终端,以在第三终端侧显示所述第二数字孪生设备。
23、可选的,所述机器人系统还包括语音识别服务器和语义管理模块;其中,
24、所述服务网关,还用于接收第四终端发送的第一语音指令;
25、所述语音识别服务器,用于识别所述第一语音指令,转换为第一文本内容;
26、所述语音管理模块,用于解析所述第一文本内容,获取其中的关键字;
27、第三机器人代理实例,用于根据所述关键字所匹配的预设指令,调用对应的微服务,并将所述微服务对应的可识别指令和数据发送给对应的第三巡检机器人,以完成相关工作。
28、可选的,所述机器人系统还包括:
29、第四机器人代理实例,用于接收对应的第四巡检机器人发送的第三服务请求,所述第三服务请求用于获得第五巡检机器人的相关信息;将所述第三服务请求发送给所述第五巡检机器人对应的第五机器人代理实例;
30、第五机器人代理实例,用于根据所述第三服务请求,向所述第五巡检机器人请求相关信息,接收所述第五巡检机器人请求返回的相关信息并转发给所述第四机器人代理实例;
31、所述第四机器人代理实例,还用于将所述相关信息发送给所述第四巡检机器人。
32、可选的,巡检机器人的自身状态信息包括以下至少一种:巡检机器人的编号,移动速度,现场空坐标,电量,到达点位后的角度,巡检点信息,巡检路线,当前时间戳,地图id,巡检机器人是否在线,巡检机器人状态,巡检机器人名称,任务类型,工作完成度,当前任务阶段,预计完成时间,工作模式。
33、可选的,在巡检机器人从第一巡检点以直线方式移动至第二巡检点,且耗时为第一时间的情况下,该巡检机器人在虚拟空间中的数字孪生机器人的移动速度是根据所述第一虚拟距离和第一时间计算得到的,其中,所述第一虚拟距离是第一虚拟巡检点和第二虚拟巡检点之间的欧式距离,其中,所述第一虚拟巡检点和第二虚拟巡检点分别是所述第一巡检点和第二巡检点在所述虚拟空间中对应的坐标点。
34、可选的,该巡检机器人在虚拟空间中的数字孪生机器人的移动速度按照以下公式计算得到:
35、
36、其中,(x′1,y′1)和(x′2,y′2)分别为所述第一虚拟巡检点和第二虚拟巡检点所述虚拟空间中对应的坐标,time表示所述第一时间。
37、可选的,所述数字孪生机器人在所述虚拟空间的角度为所述数字孪生机器人对应的巡检机器人在物理空间中的角度。
38、可选的,巡检机器人与其对应的机器人代理实例之间,通过异步的消息队列遥测传输mqtt协议、实时的http协议或tcp协议进行数据交互。
39、本发明的实施例具有以下有益效果:
40、本发明实施例的机器人系统能够实现室内或室外场景下区域巡检机器人在bim中的数字孪生,从而实现巡检机器人与设备间的数据交互,机器人之间的数据交换,以及在虚拟空间中可视化机器人的位置和状态。本发明实施例可用于设备机房,核电站,垃圾站,变电站,传染病医院等对人体有危害的场所,为机器人设备巡检提供数字孪生,从而扩大机器人的应用场景,保护巡检人员的健康。
- 还没有人留言评论。精彩留言会获得点赞!