一种自生长软体机器人及其硬化方法
1.本发明涉及软体机器人领域,更具体的说是一种自生长软体机器人及其硬化方法。
背景技术:
2.目前,软体机器人的发展吸引了越来越多的关注,软体机器人原理上突破了传统刚体机器人的设计理念,利用内部气压驱动的薄膜的外翻实现前进过程,利用其柔性特征可以实现刚体机器人所不具有的功能,刚体机器人在其结构和材料上具有诸多限制,其驱动方式比较繁琐,无法很好地适应多变复杂的环境,特别是在太空这种不存在重力的环境,在此方面软体机器人具有天然的优势。自生长的软体机器热利用尼龙薄膜材料作为主体,以气压驱动作为动力,其尖端外翻生长方式可在空间中脱离表面实现运动,利用其柔性特性可以进入狭小多变的环境进行勘测和检查。
3.然而,在脱离支撑表面运动时,由于其主体材料的柔性特征,在生长延长过程中会导致悬臂的主体刚度变差使主体失稳垂落,无法控制其尖端位置。而现有的相变硬化方案需要达到的相变温度会损坏柔性主体,而真空粒子阻塞硬化方案由于达到真空所存在的迟滞性也不能满足尖端生长模式的软体机器人,因此需要一种新的变刚度方案来保证自生长机器人在生长过程中的硬化,达到一边生长一边硬化的效果。
技术实现要素:
4.本发明的目的是提供一种自生长软体机器人及其硬化方法,可以解决生长型软体机器人生长延长过后主体刚度变差的问题。
5.本发明的目的通过以下技术方案来实现:
6.一种自生长软体机器人,包括密封盒体、储存卷筒和双层主体,双层主体由外层主体和内层主体构成,所述外层主体和内层主体之间设置有叠加支撑层,叠加层受压力叠加增加双层主体的刚性,主体的刚度可由内层主体受压压力调节;
7.所述双层主体内翻后收纳在储存卷筒上,双层主体固定连接在密封盒体上,密封盒体充气后气压驱动双层主体尖端外翻而生长;
8.进一步的,内层主体的直径大于外层主体的直径;
9.进一步的,外层主体的长度大于内层主体的长度;
10.所述叠加层为皮瓣层,皮瓣层由多层皮瓣搭接组成,每层皮瓣沿筒形外层主体的截面圆周贴在外层主体的内表面,多层皮瓣沿轴向方向依次搭接形成皮瓣层,皮瓣由皮瓣由粗糙的聚氯乙烯片材制成,即pvc片;
11.一种自生长软体机器人硬化方法,该方法包括以下步骤:
12.步骤一:密封盒体充气后气压驱动双层主体尖端外翻而生长;
13.步骤二:内层主体充气膨胀,与外层主体挤压叠加层,其中,叠加层为褶皱层或者皮瓣层;
14.步骤三:叠加层受压力内部相互叠加支撑双层主体硬化;
15.所述密封盒体上设置有充气压力可控的气泵;
16.所述双层主体硬化程度由内层主体气压来控制,实现刚度调控;
17.本发明的有益效果为:
18.软体机器人生长出的双层主体能够硬化提高刚度使其不至于因悬臂双层主体刚度太差而垂落失稳,并可以实现一边生长一边硬化;
19.外层主体长度始终大于内层主体,双层主体的尖端始终有未曾变刚度的部分,防止双层主体刚度变大导致不能完成双层主体的尖端转向。
附图说明
20.下面结合附图和具体实施方法对本发明做进一步详细的说明。
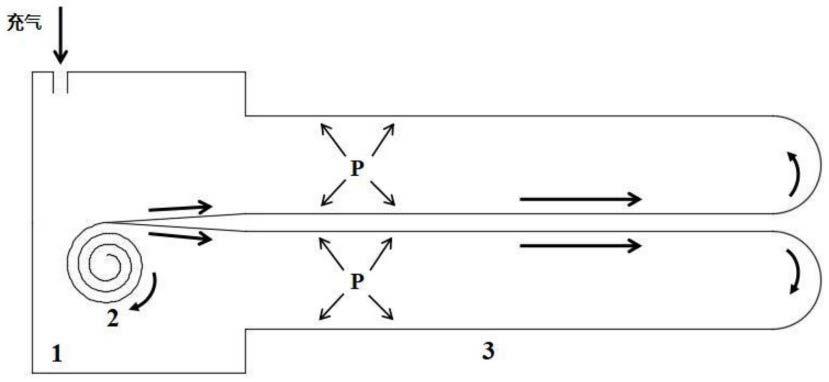
21.图1是本发明的自生长软体机器人整体结构示意图;
22.图2是本发明的皮瓣层制作原理示意图;
23.图3是本发明的充气式层间阻塞原理结构示意图;
24.图4是本发明的皮瓣层阻塞原理结构示意图。
25.图中:密封盒体1;储存卷筒2;双层主体3;外层主体31;内层主体32;叠加层4。
具体实施方式
26.下面结合附图对本发明作进一步详细说明。
27.为了解决生长型软体机器人生长延长过后主体刚度变差的问题,下面结合附图1至4,对一种自生长软体机器人的结构和功能进行详细的说明;
28.如图1所示,一种自生长软体机器人包括密封盒体1、储存卷筒2和双层主体3,双层主体3固定连接在密封盒体1上,双层主体3内翻后存储在密封盒体 1内的储存卷筒2上,密封盒体1是起到存储双层主体3内翻主体、输入驱动气压的支撑盒体,密封盒体1有一气压输入口,有一个双层主体3生长出口;
29.所述密封盒体1上设置有充气压力可控的气泵,双层主体3硬化程度由内层主体32气压来控制,实现刚度调控;
30.使用时,通过密封盒体1的气压输入口向密封盒体1内通入气体,生长型软体机器人在内部气压驱动下双层主体3的外翻,双层主体3向前生长;
31.如图3所示,双层主体3由外层主体31和内层主体32构成,外层主体31 和内层主体32之间设置由叠加层4;
32.外层主体31和内层主体32均为尼龙薄膜制成的筒膜套,内层主体32的直径大于外层主体31,使得内层主体32受到内部气压的挤压扩张大于外层主体 31的扩张,进而对外层主体31和内层主体32之间的叠加层4进行挤压;
33.叠加层4为皮瓣层,也可以是其它受到挤压可以相互折叠的结构,下面对皮瓣层的结构和功能进行详细的说明;
34.所述皮瓣层位于外层主体31和内层主体32之间,皮瓣层由多层皮瓣搭接组成皮瓣由一种粗糙的聚氯乙烯片材制成,如图2所示,每层皮瓣沿筒形薄膜的截面圆周贴在外层主体31的内表面,多层薄膜沿轴向方向依次搭接形成皮瓣层;
35.在软体机器人硬化过程中,内层主体32充气膨胀,内层主体32和外层主体31挤压中间的皮瓣层,外层主体31和皮瓣层间由于挤压存在极大的摩擦力,从而固定皮瓣层使其不能相对滑动;
36.多层皮瓣层压在一起从而极大地增加了双层主体3的刚度,使其不会轻易地压溃而垂落,以此原理增加自生长软体机器人的双层主体3刚度,双层主体3 不断向外长出,则充气硬化层不断向外扩展,实现了一边生长一边硬化的效果,生长过程中皮瓣硬化层的不断扩展实现了机器人一边生长一边硬化的效果,机器人生长过程中双层主体3的刚度可以通过调节内部充气压力来调控;
37.外层主体31的长度大于内层主体32的长度,在软体机器人生长过程中,未生长出的双层主体3始终保持同步向前长出,因此,外层主体31始终比内层主体32长出未曾硬化的一部分,外层主体31长度始终大于内层主体32,双层主体3的尖端始终有未曾变刚度的部分,防止双层主体3刚度变大导致不能完成双层主体的尖端转向。
38.一种自生长软体机器人硬化方法,该方法包括以下步骤:
39.步骤一:密封盒体1充气后气压驱动双层主体3尖端外翻而生长;
40.步骤二:内层主体32充气膨胀,与外层主体31挤压叠加层4,叠加层4为褶皱层或者皮瓣层。
41.步骤三:叠加层4受压力内部相互叠加支撑双层主体3硬化;
42.所述密封盒体1上设置有充气压力可控的气泵,所述双层主体3硬化程度由内层主体32气压来控制,实现刚度调控。
技术特征:
1.一种自生长软体机器人,包括由外层主体(31)和内层主体(32)构成的双层主体(3),其特征在于:所述外层主体(31)和内层主体(32)之间设置有叠加支撑层(4),叠加层(4)受压力叠加增加双层主体(3)的刚性。2.根据权利要求1所述的一种自生长软体机器人,其特征在于:所述内层主体(32)的直径大于外层主体(31)的直径。3.根据权利要求1所述的一种自生长软体机器人,其特征在于:所述外层主体(31)的长度大于内层主体(32)的长度。4.根据权利要求1所述的一种自生长软体机器人,其特征在于:所述叠加层(4)为皮瓣层,皮瓣层由多层皮瓣搭接组成,每层皮瓣沿筒形外层主体(31)的截面圆周贴在外层主体(31)的内表面,多层皮瓣沿轴向方向依次搭接形成皮瓣层。5.根据权利要求4所述的一种自生长软体机器人,其特征在于:所述皮瓣由粗糙的聚氯乙烯片材制成。6.根据权利要求1所述的一种自生长软体机器人,其特征在于:所述双层主体(3)内翻后收纳在储存卷筒(2)上,双层主体(3)固定连接在密封盒体(1)上,密封盒体(1)充气后气压驱动双层主体(3)尖端外翻而生长。7.一种自生长软体机器人硬化方法,其特征在于:该方法包括以下步骤:步骤一:密封盒体(1)充气后气压驱动双层主体(3)尖端外翻而生长;步骤二:内层主体(32)充气膨胀,与外层主体(31)挤压叠加层(4);步骤三:叠加层(4)受压力内部相互叠加支撑双层主体(3)硬化。8.根据权利要求7所述的一种自生长软体机器人硬化方法,其特征在于:所述叠加层(4)为皮瓣层。9.根据权利要求7所述的一种自生长软体机器人硬化方法,其特征在于:所述密封盒体(1)上设置有充气压力可控的气泵。10.根据权利要求7所述的一种自生长软体机器人硬化方法,其特征在于:所述双层主体(3)硬化程度由内层主体(32)气压来控制。
技术总结
本发明涉及软体机器人领域,更具体的说是一种自生长软体机器人及其硬化方法,包括密封盒体、储存卷筒和双层主体,双层主体由外层主体和内层主体构成,所述外层主体和内层主体之间设置有叠加支撑层,叠加层受压力叠加增加双层主体的刚性;所述双层主体内翻后收纳在储存卷筒上,双层主体固定连接在密封盒体上,密封盒体充气后气压驱动双层主体尖端外翻而生长;进一步的,内层主体的直径大于外层主体的直径;进一步的,外层主体的长度大于内层主体的长度;可以解决生长型软体机器人生长延长过后主体刚度变差的问题。主体刚度变差的问题。主体刚度变差的问题。
技术研发人员:周德开 李朋春 常晓丛 张永昌 权家乐 李隆球
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.03.15
技术公布日:2022/8/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1