一种救援用蛇形机器人
1.本发明属于机器人技术领域,具体涉及一种救援用蛇形机器人。
背景技术:
2.地震、火灾、核辐射、爆炸以及矿难等灾害会对周围建筑物造成大范围的破坏,造成非常复杂的灾后环境。这种灾后环境一般地形不稳定,一方面,盲目动用大型机械设备可能会造成二次破坏,同时容易对遇难人员和搜救人员造成二次伤害;另一方面,灾后环境也有许多危险因素,比如高温、烟雾、爆炸、崩塌以及危险品泄漏等,对搜救人员带来极大的危险,严重妨碍救援抢险工作的进行。
3.因此只能借助小型机器人进行探测摸清灾后环境,进行第一时间救援。但是现有的机器人体积大,灵活性较差,特别是一些异形小空间,机器人无法通过,影响救援效率。
技术实现要素:
4.本发明的目的是提供进一种救援用蛇形机器人,用于解决现有技术中机器人体积大,灵活性较差,无法通过一些异形小空间,导致救援效率低的技术问题。
5.本发明型解决其技术问题所采用的方案是:
6.一种救援用蛇形机器人,包括控制模块、n个第一运动模块和(n+1)个第二运动模块;每个第二运动模块包括两个第二运动单元;n个第一运动模块(n+1)个第二运动模块隔设置并依次连接,n为大于等于2的正整数;
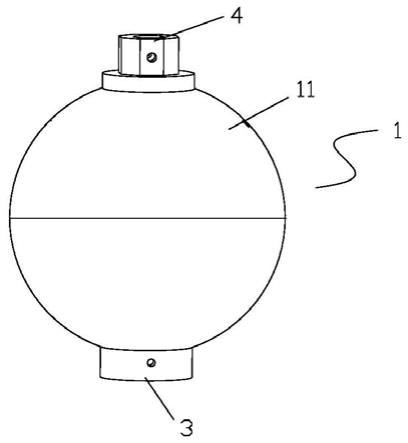
7.所述第一运动模块包括半径相同的两个第一半球壳体,两个第一半球壳体相对适配安装组成完整的第一球体,其中一个第一半球壳体中固定设置有第一舵机,第一舵机的输出轴与另一个第一半球壳体固定连接;第一舵机的输出轴与第一半球壳体的端面垂直,且与第一球体轴线重合;其中一个第一半球壳体的顶部固定设置有第一连接件,另一个第一半球壳体的顶部固定设置有第二连接件;第一连接件和第二连接件的中心连线与第一半球壳体的端面垂直,且与第一球体轴线重合,第一舵机驱动两个第一半球壳体相对转动;
8.所述第二运动单元包括半径相同的两个第二半球壳体,两个第二半球壳体相对适配安装组成完整的第二球体,其中一个第二半球壳体中固定设置有第二舵机,第二舵机的输出轴与另一个第二半球壳体固定连接;第二舵机的输出轴与第二半球壳体的端面垂直,且与第二球体轴线重合;其中一个第二半球壳体的顶部固定设置有第一连接件,另一个第一半球壳体的顶部固定设置有第二连接件;第一连接件和第二连接件的中心连线与第二半球壳体的端面成45度,且与第二球体轴线重合,第二舵机驱动两个第二半球壳体相对转动;每个第二运动模块中,一个第二运动单元的第一连接件与另一个第二运动单元的第二连接件固连;
9.相邻的第一运动模块和第二运动模块通过第一连接件和第二连接件固连;
10.救援用蛇形机器人的前端第二运动模块上设置有摄像头、温度传感器、适度传感器和氧浓度传感器;尾部设置有电池、控制模块和无线通信模块;摄像头、温度传感器、适度
传感器、氧浓度传感器、无线通信模块、第一舵机和第二舵机均通过导线与控制模块电连接,电池为摄像头、温度传感器、适度传感器、氧浓度传感器、无线通信模块、第一舵机和第二舵机供电。
11.所述温度传感器用于检测灾后环境中的温度,适度传感器用于检测灾后环境中的湿度,氧浓度传感器用于检测灾后环境中氧气浓度,摄像头拍摄的图片、视频,以及温度传感器、适度传感器、氧浓度传感器检测的数据通过无线通信模块传送给外部的终端设备,便于救援人员及时、真实的了解灾后环境,为后续的救援提供有力的支持。
12.与现有技术相比,本技术中的救援用蛇形机器人有多个自由度,与生物蛇一样具有运动灵活等特点,能够在在一些狭小、复杂环境下完成其他机器人无法完成的任务。
13.本技术中,通过设计第一运动模块和第二运动模块,采用开放性的模块化设计,根据具体要求确定组装数量,且组装或者拆卸起来都相当简便,非常灵活,适用性强。
14.进一步改进,所述第一运动模块中相对设置的两个第一半球壳体,其中一个第一半球壳体的端面沿周向开设有第一滑槽,另一个第一半球壳体的端面设置有第一环形滑块,第一滑块活动式卡设在第一滑槽中;
15.所述第二运动单元中相对设置的两个第二半球壳体,其中一个第二半球壳体的端面沿周向开设有第二滑槽,另一个第二半球壳体的端面设置有第二环形滑块,第二滑块活动式卡设在第二滑槽中。
16.进一步改进,所述第一连接件为圆管,其中心沿轴向开设有多边形通道,该多边形通道与对应的半球壳体的腔体连通;所述第二连接件均为端面呈多边形的柱状体,其中心沿轴线开设有用于电器元件连接导线穿过的圆形通道,该圆形通道与对应的半球壳体的腔体连通;第二连接件插入对应的第一连接件的多边形通道中适配安装,并采用穿过第二连接件和第一连接件侧壁的螺栓将二者紧固连接。便于相邻第一运动模块和第二运动模块拆装,操作方便。
17.进一步改进,还包括gps定位模块,gps定位模块与电池和控制模块电连接。用于定位机器人的位置,检测不同位置处的温度、湿度等数据,便于后续救援的展开。
18.进一步改进,所述第一球体和第二球体的半径相同。
19.本发明型的有益效果是:
20.与现有技术相比,本技术中的救援用蛇形机器人有多个自由度,与生物蛇一样具有运动灵活等特点,能够在在一些狭小、复杂环境下完成其他机器人无法完成的任务。
21.本技术中,通过设计第一运动模块和第二运动模块,采用开放性的模块化设计,根据具体要求确定组装数量,且组装或者拆卸起来都相当简便,非常灵活,适用性强。
附图说明
22.图1显示了本发明第一运动模块的结构示意图;
23.图2显示了第二运动单元的结构示意图;
24.图3为图2中第二运动单元的第二舵机转动180后的结构示意图;
25.图4显示了第二半球壳体的结构示意图;
26.图5显示救援用蛇形机器人初始状态的结构示意图;
27.图6显示救援用蛇形机器人步骤2中的结构示意图;
28.图7显示救援用蛇形机器人步骤3中的结构示意图;
29.图8显示救援用蛇形机器人步骤3中的另一状态结构示意图;
30.图9显示救援用蛇形机器人步骤4中的结构示意图。
具体实施方式
31.下面给出发明的具体实施方法,并结合附图对本发明型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明型的最佳实施例,而不是全部的实施例。基于本发明型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明型保护的范围。
32.如图1-5所示,一种救援用蛇形机器人,包括控制模块、n个第一运动模块1和(n+1) 个第二运动模块;每个第二运动模块包括两个第二运动单元2;n个第一运动模块(n+1) 个第二运动模块隔设置并依次连接,n为大于等于2的正整数。
33.所述第一运动模块1包括半径相同的两个第一半球壳体11,两个第一半球壳体相对适配安装组成完整的第一球体,其中一个第一半球壳体中固定设置有第一舵机,第一舵机的输出轴与另一个第一半球壳体固定连接;第一舵机的输出轴与第一半球壳体的端面垂直,且与第一球体轴线重合;其中一个第一半球壳体的顶部固定设置有第一连接件3,另一个第一半球壳体的顶部固定设置有第二连接件4;第一连接件和第二连接件的中心连线与第一半球壳体的端面垂直,且与第一球体轴线重合,第一舵机驱动两个第一半球壳体相对转动。
34.所述第二运动单元2包括半径相同的两个第二半球壳体21,两个第二半球壳体相对适配安装组成完整的第二球体,其中一个第二半球壳体中固定设置有第二舵机22,第二舵机的输出轴与另一个第二半球壳体固定连接;第二舵机的输出轴与第二半球壳体的端面垂直,且与第二球体轴线重合;其中一个第二半球壳体的顶部固定设置有第一连接件,另一个第一半球壳体的顶部固定设置有第二连接件;第一连接件和第二连接件的中心连线与第二半球壳体的端面成45度,且与第二球体轴线重合,第二舵机驱动两个第二半球壳体相对转动;每个第二运动模块中,一个第二运动单元的第一连接件与另一个第二运动单元的第二连接件固连;相邻的第一运动模块和第二运动模块通过第一连接件和第二连接件固连。
35.救援用蛇形机器人的前端第二运动模块上设置有摄像头6、温度传感器、适度传感器和氧浓度传感器;尾部设置有电池、控制模块和无线通信模块;摄像头、温度传感器、适度传感器、氧浓度传感器、无线通信模块、第一舵机和第二舵机均通过导线与控制模块电连接,电池为摄像头、温度传感器、适度传感器、氧浓度传感器、无线通信模块、第一舵机和第二舵机供电。
36.所述温度传感器用于检测灾后环境中的温度,适度传感器用于检测灾后环境中的湿度,氧浓度传感器用于检测灾后环境中氧气浓度,为后续的救援提供帮助。
37.在本实施例中,n等于2,即共有6个第二运动单元和2个第一运动模块。
38.在其他实施例中,n可以为3、4、5等,根据具体要求而定。
39.与现有技术相比,本技术中的救援用蛇形机器人有多个自由度,与生物蛇一样具有运动灵活等特点,能够在在一些狭小、复杂环境下完成其他机器人无法完成的任务。
40.本技术中,通过设计第一运动模块和第二运动模块,采用开放性的模块化设计,根
据具体要求确定组装数量,且组装或者拆卸起来都相当简便,非常灵活,适用性强。
41.在本实施例中,所述第一运动模块中相对设置的两个第一半球壳体,其中一个第一半球壳体的端面沿周向开设有第一滑槽,另一个第一半球壳体的端面设置有第一环形滑块,第一滑块活动式卡设在第一滑槽中;
42.所述第二运动单元中相对设置的两个第二半球壳体,其中一个第二半球壳体的端面沿周向开设有第二滑槽,另一个第二半球壳体的端面设置有第二环形滑块,第二滑块活动式卡设在第二滑槽中。
43.在本实施例中,所述第一连接件3为圆管,其中心沿轴向开设有多边形通道,该多边形通道与对应的半球壳体的腔体连通;所述第二连接件4均为端面呈多边形的柱状体,其中心沿轴线开设有用于电器元件连接导线穿过的圆形通道,该圆形通道与对应的半球壳体的腔体连通;第二连接件插入对应的第一连接件的多边形通道中适配安装,并采用穿过第二连接件和第一连接件侧壁的螺栓将二者紧固连接。便于相邻第一运动模块和第二运动模块拆装,操作方便。
44.在本实施例中,还包括gps定位模块,gps定位模块与电池和控制模块电连接。用于定位机器人的位置,检测不同位置处的温度、湿度等数据,便于后续救援的展开。
45.在本实施例中,所述第一球体和第二球体的半径相同。
46.本实施例中,2个第一运动模块和3第二运动模块组成的蛇形机器人共8个球体单元,从头至尾依次记为:一号球体10、二号球体20、三号球体30、四号球体40、五号球体50、六号球体60、七号球体70和八号球体80,如图5所示,该蛇形机器人移动方法如下:
47.步骤1、初始状态:8个球体单元处于同一条直线,所有的第一舵机和第二舵机的初始角度均为0
°
,如图5所示。
48.步骤2、开始抬头,二号球体的第二舵机转动转动180度,带动一号球体一起转动180 度,此时一号球体处于竖直状态,且一号球的顶部抵持在周围的物件上,在非动力驱动的情况下不能动,如图6所示。
49.步骤3、机器人身体收缩,身体后端支撑管道:
50.一号球的顶部抵持在周围的物件后,四号球体和五号球体的第二舵机均转动180度,此时,五号球体处于竖直状态,二号球体、三号球体和四号球体的中心连线为记为直线一,五号球体、六号球体、七号球体和八号球体的中心连线为记为直线二,直线一和直线二平行,且一号球体、五号球体、六号球体、七号球体和八号球体位于二号球体、三号球体和四号球体的上方,如图7所示。
51.然后七号球体的第二舵机转动180度,带动八号球体一起转动180度,此时八号球处于竖直状态,且与二号球体、三号球体和四号球位于同一直线,此时八号球底部抵持在周围的物件上,在非动力驱动的情况下不能动,如图8所示。
52.步骤4、一号球体至七号球体伸展:
53.二号球体和四号球体继续转动180度,此时一号球体至七号球体位于同一高度,且位于八号球的上方,如图9所示。然后八号球体继续转动180度,带动一号球体至七号球体整体转动180度,此时,一号球体、二号球体、三号球体、四号球体、五号球体、六号球体、七号球体和八号球体再次位于统一直线,则整个蛇形机器人向前移动了一个球体直径的长度距离。
54.然后不断重复步骤2-4,实现机器人模仿蛇的蠕动前进。
55.上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1