基于空间解析几何的并联机器人正解及逆解方法与流程
1.本发明涉及机器人技术领域,具体涉及一种基于空间解析几何的四轴delta并联机器人正解方法及逆解方法。
背景技术:
2.并联机器人具有刚度高、速度快、柔性强、重量轻等优点,在食品、医药、电子等轻工业中应用最为广泛,在物料的搬运、包装、分拣等方面有着无可比拟的优势,已成为工业机器人领域不可忽视的一股新兴力量。然而目前针对delta型并联机器人的运动学算法,由于引入过多参数,及求解过程过于繁杂等问题,致使算法运算效率低下。
技术实现要素:
3.针对现有技术存在的问题,本发明的目的在于提供一种基于空间解析几何的四轴delta并联机器人正解方法及逆解方法,以提高正解及逆解的运算效率。
4.为实现上述目的,本发明采用的技术方案是:
5.一种基于空间解析几何的四轴delta并联机器人逆解方法,所述并联机器人包括一静平台、三主动臂、三从动臂、一动平台、一末端机构、一可伸缩传动轴,其中,静平台与主动臂通过通过电机和减速机连接,主动臂和从动臂通过铰链连接,从动臂与动平台通过铰链连接;
6.所述逆解方法包括以下步骤:
7.步骤1、以静平台中心为原点建立基坐标系o-xyz,并设定机器人结构参数如下:
8.[0009][0010]
步骤2、求取基坐标系原点指向动平台中心的向量r;
[0011]
r=bi+l1iui+l2iwiꢀꢀ
(1)
[0012]
其中:
[0013][0014]
则
[0015]
步骤3、令与y重合,与y轴重合,然后绕z轴转动α
i-π/2,再绕yi转动βi,然后再绕xi'轴转动θi,在机器人中向下为正,所以代入-θi,得到:
[0016][0017]
步骤4、将式(1)进行改写得:
[0018]
r-b
i-l1iui=l2iwiꢀꢀ
(4);
[0019]
利用式(4)两边模量相等,并化简得到,
[0020][0021]
步骤5、将代入式(5);
[0022]
令常数项:
[0023]
则式(5)可写成:
[0024]-2l1i(r-bi)
t
ui+ci=0
[0025]
代入已知项:
[0026][0027]
得:
[0028]-2l1i(x-b
ix
)(cosαicosθ
i-sinαisinβisinθi)-2l1i(y-b
iy
)(sinαicosθi+cosαisinβisinθ)+2l1i(z-b
iz
)(-cosβisinθi)+ci=0
[0029]
进一步化简得:
[0030]-2l1i((x-b
ix
)cosαi+(y-b
iy
)sinαi)cosθ+2l1i((x-b
ix
)sinαisinβ
i-(y-b
iy
)cosαisinβ
i-(z-b
iz
)cosβi)sinθi+ci=0
[0031]ai
sinθi+bicosθ+ci=0
ꢀꢀ
(6)
[0032]
公式中:
[0033]ai
=2l1i((x-b
ix
)sinαisinβ
i-(y-b
iy
)cosαisinβ
i-(z-b
iz
)cosβi)
[0034]bi
=-2l1i((x-b
ix
)cosαi+(y-b
iy
)sinαi)
[0035][0036]
已知:
[0037][0038][0039]
令:
[0040]
t=tan(θi/2)
[0041]
则式(6)可写成:
[0042][0043]
2ait+bi(1-t2)+ci(1+t2)=0
[0044]
(c
i-bi)t2+2ait+(bi+ci)=0
[0045]
解得:
[0046][0047]
步骤6、由于关节角只限于0-90
°
活动,则t不能为负数,故舍去负数项得:
[0048][0049]
所求关节角为:
[0050]
[0051]
对上述z进行修正:z=z+d,其中,d为机器人末端中心与动平台中心的距离。
[0052]
一种基于空间解析几何的四轴delta并联机器人正解方法,所述并联机器人包括一静平台、三主动臂、三从动臂、一动平台、一末端机构、一可伸缩传动轴,其中,静平台与主动臂通过通过电机和减速机连接,主动臂和从动臂通过铰链连接,从动臂与动平台通过铰链连接;
[0053]
所述正解方法包括以下步骤:
[0054]
步骤1、以静平台中心为原点建立基坐标系o-xyz,并设定机器人结构参数如下:
[0055][0056][0057]
步骤2、求取基坐标系原点指向动平台中心的向量r;
[0058]
r=bi+l1iui+l2iwiꢀꢀ
(1)
[0059]
其中:
[0060][0061]
则
[0062]
步骤3、令ui与y重合,ui与y轴重合,然后ui绕z轴转动α
i-π/2,再绕yi转动βi,然后再绕xi'轴转动θi,在机器人中向下为正,所以代入-θi,得到:
[0063][0064]
步骤4、将式(1)进行改写得:
[0065]
r-b
i-l1iui=l2iwiꢀꢀ
(4);
[0066]
利用式(4)两边模量相等,并化简得到,
[0067][0068]
步骤5、将公式(5)整理得:
[0069][0070]
即:
[0071][0072]
其中:
[0073]
r=[x,y,z]
t
;
[0074]
步骤6、将式(9)中的等式两两相减得:
[0075][0076][0077][0078]
即:
[0079][0080]
[0081][0082]
令:
[0083]
g1=c
1-c2[0084]
g2=c
2-c3[0085]
g3=c
1-c3[0086]
其中:
[0087][0088]
步骤7、选取式(12)中的任意两式,得到线性方程组,结合式(9)进行解方程,得到x,y,z;
[0089]
步骤8、机器人末端机构与动平台距离为d,则末端机构中心位姿可表示为
[0090][0091]
即得到末端机构位姿为:
[0092][0093]
所述步骤7中,选取式(12)中的第1式和第2式建立方程组,令
[0094]a11
=2(b
1x-b
2x
+l11u
1x-l12u
2x
)
[0095]a12
=2(b
1y-b
2y
+l11u
1y-l12u
2y
)
[0096]a13
=2(b
1z-b
2z
+l11u
1z-l12u
2z
)
[0097]a21
=2(b
2x-b
3x
+l12u
2x-l13u
3x
)
[0098]a22
=2(b
2y-b
3y
+l12u
2y-l13u
3y
)
[0099]a23
=2(b
2z-b
3z
+l12u
2z-l13u
3z
)
[0100]
则得到
[0101]a11
x+a
12
y+a
13
z=g1[0102]a21
x+a
22
y+a
23
z=g2[0103]
g1=c
1-c2[0104]
g2=c
2-c3[0105]
其中:
[0106]
[0107]
令:
[0108]
x=m2+n2z
[0109]
y=m1+n1z
[0110]
则可得到:
[0111]
m1=-(a
11g2-a
21
g1)/(a
12a21-a
11a22
)
[0112]
m2=-(a
22g1-a
12
g2)/(a
12a21-a
11a22
)
[0113]
n1=(a
11a23-a
13a21
)/(a
12a21-a
11a22
)
[0114]
n2=(a
22a13-a
12a23
)/(a
12a21-a
11a22
)
[0115]
将x,y,z代入式(9)的第1式:
[0116][0117]
即:
[0118][0119]
由于:
[0120][0121]
则上式可变为:
[0122]
x2+y2+z
2-2{(b
1x
+l11u
1x
)x+(b
1y
+l11u
1y
)y+(b
1z
+l11u
1z
)z}+c1=0
[0123]
其中:
[0124]
x=m2+n2z
[0125]
y=m1+n1z
[0126]
上式中m1、n1、m2、n2已知
[0127]
代入化简得到:
[0128]
(m2+n2z)2+(m1+n1z)2+z
2-2{(b
1x
+l11u
1x
)(m2+n2z)+(b
1y
+l11u
1y
)(m1+n1z)+(b
1z
+l11u
1z
)z}+c1=0
ꢀꢀ
(13)
[0129]
展开得:
[0130]
(n
12
+n
22
+1)z2+2{m2n2+m1n
1-(b
1x
+l11u
1x
)n
2-(b
1y
+l11u
1y
)n
1-(b
1z
+l11u
1z
)}z+(m
22
+m
12-2(b
1x
+l11u
1x
)m
2-2(b
1y
+l11u
1y
)m1)+c1=0
[0131]
令:
[0132]
k=(n
12
+n
22
+1)
[0133]
e=2{m2n2+m1n
1-(b
1x
+l11u
1x
)n
2-(b
1y
+l11u
1y
)n
1-(b
1z
+l11u
1z
)}
[0134]
f=(m
22
+m
12-2(b
1x
+l11u
1x
)m
2-2(b
1y
+l11u
1y
)m1)+c1[0135]
得到二次方程:
[0136]
kz2+ez+f=0
[0137][0138]
x=m2+n2z
[0139]
y=m1+n1z
[0140]
式中除x、y、z外均已知,已知项如下:
[0141][0142]
e=2m2n2+2m1n
1-2(b
1x
+l11u
1x
)n
2-2(b
1y
+l11u
1y
)n
1-2(b
1z
+l11u
1z
)
[0143][0144]
m1=-(a
11g2-a
21
g1)/(a
12a21-a
11a22
)
[0145]
m2=-(a
22g1-a
12
g2)/(a
12a21-a
11a22
)
[0146]
n1=(a
11a23-a
13a21
)/(a
12a21-a
11a22
)
[0147]
n2=(a
22a13-a
12a23
)/(a
12a21-a
11a22
)
[0148]a11
=2(b
1x-b
2x
+l11u
1x-l12u
2x
)
[0149]a12
=2(b
1y-b
2y
+l11u
1y-l12u
2y
)
[0150]a13
=2(b
1z-b
2z
+l11u
1z-l12u
2z
)
[0151]a21
=2(b
2x-b
3x
+l12u
2x-l13u
3x
)
[0152]a22
=2(b
2y-b
3y
+l12u
2y-l13u
3y
)
[0153]a23
=2(b
2z-b
3z
+l12u
2z-l13u
3z
)
[0154]
g1=c
1-c2[0155]
g2=c
2-c3[0156][0157]
至此,x、y、z均可代入求出。
[0158]
采用上述方案后,本发明构建了多个关键参数,这些关键参数比几何法能更加详细准确的表征机器人的运动学特性,基于这些参数构建的数学模型,通过空间解析解析几何数学变换方法,避免了求解四次方程一般解的问题,有效提高了机器人正解及逆解的求解效率。并且,本发明在正解求解过程中采用拼凑齐次方程组,求解齐次方程组的方法,以避免高次方程求解,进一步提高了求解效率。
附图说明
[0159]
图1为四轴delta并联机器人结构示意图;
[0160]
图2为四轴delta并联机器人单轴机构简图;
[0161]
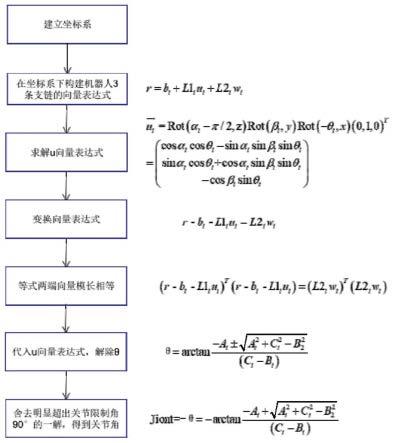
图3为四轴delta并联机器人的逆解流程图;
[0162]
图4为四轴delta并联机器人的正解流程图。
具体实施方式
[0163]
如图1所示,本发明所应用的四轴delta并联机器人包括一静平台1、三主动臂4、三从动臂5、一动平台8、一末端机构9、一可伸缩传动轴10,其中,静平台1与主动臂4通过通过电机3和减速机2连接,主动臂4和从动臂5通过铰链连接,从动臂5与动平台8通过铰链连接。
[0164]
如图2和图3所示,基于上述四轴delta并联机器人,本发明提出了一种基于空间解析几何的四轴delta并联机器人逆解方法,其包括以下步骤:
[0165]
步骤1、以静平台中心为原点建立基坐标系o-xyz,并设定机器人结构参数如下:
[0166][0167][0168]
步骤2、求取基坐标系原点指向动平台中心的向量r;
[0169]
r=bi+l1iui+l2iwiꢀꢀ
(1)
[0170]
其中:
[0171][0172]
则
[0173]
其中,bi表示主动臂铰链的位置误差,l1i表示第i个主动臂的长度,l2i表示第i个从动臂的长度,ui为主动臂的单位方向向量,wi为从动臂的单位方向向量,为三个主动臂与静平台铰链的位置在基坐标系o下的位置的向量表示,为三个从动臂与动平台中心的向量在基坐标系o下的表示。
[0174]
步骤3、求主动臂单位向量:令ui与y重合,ui与y轴重合,然后ui绕z轴转动α
i-π/2,再绕yi转动βi,然后再绕xi'轴转动θi,在机器人中向下为正,所以代入-θi,得到
[0175][0176]
其中,βi为三个主动臂轴向与静平台的夹角,默认为0度;rot(参数1,参数2),表示绕参数2轴逆时针转动参数1度。
[0177]
步骤4、将式(1)进行改写得:
[0178]
r-b
i-l1iui=l2iwiꢀꢀ
(4);
[0179]
其中:r=(x,y,z)
t
,bi=(b
ix
,b
iy
,b
iz
)
t
[0180][0181]
式(4)两端向量模长相等,则:
[0182]
(r-b
i-l1iui)
t
(r-b
i-l1iui)=(l2iwi)
t
(l2iwi)
[0183]
进一步化简得:
[0184]rt
r-r
tbi-r
t
(l1iui)-b
it
r+b
it
(bi)+b
it
(l1iui)-(l1iui)
t
r+(l1iui)
tbi
+(l1iui)
t
(l1iui)-(l2iwi)
t
(l2iwi)=0
[0185]rt
r-2b
it
r-l1i(r
t
ui+u
it
r)+l1i(b
it
ui+u
itbi
)+l1
i2
+b
it
(bi)-l2
i2
=0
[0186]rt
r-2b
it
r-l1i(r
t
ui+u
it
r)+l1i(b
it
ui+u
itbi
)+l1
i2
+b
it
(bi)-l2
i2
=0
[0187]rt
r-2b
it
r-2l1
irt
ui+2l1
ibit
ui+l1
i2
+b
it
(bi)-l2
i2
=0
[0188]
得到,
[0189][0190]
步骤5、将代入式(5);
[0191]
令常数项:
[0192]
则式(5)可写成:
[0193]-2l1i(r-bi)
t
ui+ci=0
[0194]
代入已知项:
[0195][0196]
得:
[0197]-2l1i(x-b
ix
)(cosαicosθ
i-sinαisinβisinθi)-2l1i(y-b
iy
)(sinαicosθi+cosαisinβisinθ)+2l1i(z-b
iz
)(-cosβisinθi)+ci=0
[0198]
进一步化简得:
[0199]-2l1i((x-b
ix
)cosαi+(y-b
iy
)sinαi)cosθ+2l1i((x-b
ix
)sinαisinβ
i-(y-b
iy
)cosαisinβ
i-(z-b
iz
)cosβi)sinθi+ci=0
[0200]ai
sinθi+bicosθ+ci=0
ꢀꢀ
(6)
[0201]
公式中:
[0202]ai
=2l1i((x-b
ix
)sinαisinβ
i-(y-b
iy
)cosαisinβ
i-(z-b
iz
)cosβi)
[0203]bi
=-2l1i((x-b
ix
)cosαi+(y-b
iy
)sinαi)
[0204][0205]
已知:
[0206][0207][0208]
令:
[0209]
t=tan(θi/2)
[0210]
则式(6)可写成:
[0211][0212]
2ait+bi(1-t2)+ci(1+t2)=0
[0213]
(c
i-bi)t2+2ait+(bi+ci)=0
[0214]
解得:
[0215][0216]
步骤6、由于关节角只限于0-90
°
活动,则t不能为负数,故舍去负数项得:
[0217][0218]
所求关节角为:
[0219][0220]
上述逆解的求解过程是以动平台的中心为变量的,事实上,机器人末端指的是法兰盘的末端中心,两中心相差正好是d,因此在计算中要对z修正:z=z+d。
[0221]
结合图2和图4所示,基于同一发明构思,本发明还揭示了一种基于空间解析几何的四轴delta并联机器人正解方法,其包括以下步骤:
[0222]
步骤1、以静平台中心为原点建立基坐标系o-xyz,并设定机器人结构参数;步骤2、求取基坐标系原点指向动平台中心的向量r;
[0223]
步骤3、令与y重合,与y轴重合,然后绕z轴转动α
i-π/2,再绕yi转动βi,然后再绕xi'轴转动θi,在机器人中向下为正,所以代入-θi。得到:
[0224][0225]
步骤4、将式(1)进行改写得
[0226][0227]
上述步骤1-4的内容与正解方法中的步骤1-4相同,此处不进行过多赘述。
[0228]
步骤5、将公式(5)整理得:
[0229][0230]
即:
[0231][0232]
其中:
[0233]
r=[x,y,z]
t
;
[0234]
步骤6、将式(9)中的等式两两相减得:
[0235][0236][0237][0238]
即:
[0239][0240]
[0241][0242]
令:
[0243]
g1=c
1-c2[0244]
g2=c
2-c3[0245]
g3=c
1-c3[0246]
其中:
[0247][0248]
步骤7、选取式(12)中的任意两式,得到线性方程组,结合式(9)进行解方程,得到x,y,z。
[0249]
注意方程组的奇异性问题,与坐标系的建立有关,构建坐标系或者选取式(12)中的公式构建方程组时,避免系数为零,物理上即任意两电机连线的向量与坐标轴平行的情况。
[0250]
本实施例中,选取式(12)中的第1式和第2式建立方程组,令
[0251]a11
=2(b
1x-b
2x
+l11u
1x-l12u
2x
)
[0252]a12
=2(b
1y-b
2y
+l11u
1y-l12u
2y
)
[0253]a13
=2(b
1z-b
2z
+l11u
1z-l12u
2z
)
[0254]a21
=2(b
2x-b
3x
+l12u
2x-l13u
3x
)
[0255]a22
=2(b
2y-b
3y
+l12u
2y-l13u
3y
)
[0256]a23
=2(b
2z-b
3z
+l12u
2z-l13u
3z
)
[0257]
则得到
[0258]a11
x+a
12
y+a
13
z=g1[0259]a21
x+a
22
y+a
23
z=g2[0260]
g1=c
1-c2[0261]
g2=c
2-c3[0262]
其中:
[0263][0264]
令:
[0265]
x=m2+n2z
[0266]
y=m1+n1z
[0267]
则可得到:
[0268]
m1=-(a
11g2-a
21
g1)/(a
12a21-a
11a22
)
[0269]
m2=-(a
22g1-a
12
g2)/(a
12a21-a
11a22
)
[0270]
n1=(a
11a23-a
13a21
)/(a
12a21-a
11a22
)
[0271]
n2=(a
22a13-a
12a23
)/(a
12a21-a
11a22
)
[0272]
将x,y,z代入式(9)的第1式:
[0273][0274]
即:
[0275][0276]
由于:
[0277][0278]
则上式可变为:
[0279]
x2+y2+z
2-2{(b
1x
+l11u
1x
)x+(b
1y
+l11u
1y
)y+(b
1z
+l11u
1z
)z}+c1=0
[0280]
其中:
[0281]
x=m2+n2z
[0282]
y=m1+n1z
[0283]
上式中m1、n1、m2、n2已知
[0284]
代入化简得到:
[0285]
(m2+n2z)2+(m1+n1z)2+z
2-2{(b
1x
+l11u
1x
)(m2+n2z)+(b
1y
+l11u
1y
)(m1+n1z)+(b
1z
+l11u
1z
)z}+c1=0
ꢀꢀ
(13)展开得:
[0286]
(n
12
+n
22
+1)z2+2{m2n2+m1n
1-(b
1x
+l11u
1x
)n
2-(b
1y
+l11u
1y
)n
1-(b
1z
+l11u
1z
)}z+(m
22
+m
12-2(b
1x
+l11u
1x
)m
2-2(b
1y
+l11u
1y
)m1)+c1=0
[0287]
令:
[0288]
k=(n
12
+n
22
+1)
[0289]
e=2{m2n2+m1n
1-(b
1x
+l11u
1x
)n
2-(b
1y
+l11u
1y
)n
1-(b
1z
+l11u
1z
)}
[0290]
f=(m
22
+m
12-2(b
1x
+l11u
1x
)m
2-2(b
1y
+l11u
1y
)m1)+c1[0291]
得到二次方程:
[0292]
kz2+ez+f=0
[0293][0294]
x=m2+n2z
[0295]
y=m1+n1z
[0296]
式中除x、y、z外均已知,已知项如下:
[0297][0298]
e=2m2n2+2m1n
1-2(b
1x
+l11u
1x
)n
2-2(b
1y
+l11u
1y
)n
1-2(b
1z
+l11u
1z
)
[0299][0300]
m1=-(a
11g2-a
21
g1)/(a
12a21-a
11a22
)
[0301]
m2=-(a
22g1-a
12
g2)/(a
12a21-a
11a22
)
[0302]
n1=(a
11a23-a
13a21
)/(a
12a21-a
11a22
)
[0303]
n2=(a
22a13-a
12a23
)/(a
12a21-a
11a22
)
[0304]a11
=2(b
1x-b
2x
+l11u
1x-l12u
2x
)
[0305]a12
=2(b
1y-b
2y
+l11u
1y-l12u
2y
)
[0306]a13
=2(b
1z-b
2z
+l11u
1z-l12u
2z
)
[0307]a21
=2(b
2x-b
3x
+l12u
2x-l13u
3x
)
[0308]a22
=2(b
2y-b
3y
+l12u
2y-l13u
3y
)
[0309]a23
=2(b
2z-b
3z
+l12u
2z-l13u
3z
)
[0310]
g1=c
1-c2[0311]
g2=c
2-c3[0312][0313]
至此,x、y、z均可代入求出。
[0314]
步骤8、机器人末端机构与动平台距离为d,则末端机构中心位姿可表示为
[0315][0316]
即得到末端机构位姿为:
[0317][0318]
本发明利用matlab实现上述正解、逆解计算。matlab程序如下:
[0319]
(1)正解
[0320]
[0321]
[0322]
[0323]
[0324]
[0325][0326]
(2)逆解
[0327]
[0328][0329]
综上,本发明构建了多个关键参数,这些关键参数比几何法能更加详细准确的表征机器人的运动学特性,基于这些参数构建的数学模型,通过空间解析解析几何数学变换方法,避免了求解四次方程一般解的问题,有效提高了机器人正解及逆解的求解效率。并且,本发明在正解求解过程中采用拼凑齐次方程组,求解齐次方程组的方法,以避免高次方程求解,进一步提高了求解效率。
[0330]
以上所述,仅是本发明实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本
发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1