一种完全解耦的球面3R转动并联机构的制作方法
一种完全解耦的球面3r转动并联机构
技术领域
1.本发明涉及机器人技术领域,特别涉及一种完全解耦的球面3r转动并联机构。
背景技术:
2.并联机器人机构为空间多自由度多环闭链形式。自上世纪八十年代以来,并联机构因其具有刚度高、承载能力大、累积误差小、动态特性好、结构紧凑等特点而在虚拟轴机床、微动操作台、运动模拟器以及多维力传感器等行业领域获得广泛应用,并联机构具有2、3、4、5或6个自由度,目前,对6个自由度并联机构的研究较为全面和深入,但并联机构自由度的减少将使得机构结构更为简单,制造和控制成本相对较低,故在满足预期工作要求的情况下,少自由度并联机器人有其独特的优势。
3.但是,现有的完全解耦的球面3r机构构型十分少见,且大多数为伪完全解耦的球面3r机构,这些伪完全解耦的球面3r机构其本质并不具有完全解耦的特征。
技术实现要素:
4.本发明提供一种完全解耦的球面3r转动并联机构,用以解决伪完全解耦的球面3r机构动态性能低、运动控制复杂等问题。具体方案为:一种完全解耦的球面3r转动并联机构,包括定平台、动平台以及设置在定平台和动平台之间的三条运动支链,所述定平台上分别设置有第一转动副、第一移动副、第二移动副;所述第一转动副、第一移动副、第二移动副均安装在定平台上,所述第一转动副、第一移动副、第二移动副分别连接有驱动电机;所述运动支链包括第一支链、第二支链和第三支链,所述第一支链的一端、第二支链一端和第三支链的一端分别通过第一转动副、第一移动副、第二移动副与定平台上活动连接;所述第一支链的另一端与动平台活动连接;所述第二支链的另一端活动连接在第一支链上;所述第三支链远离定平台的一端分别与第一支链和动平台活动连接。
5.进一步的,所述第一支链包括顺次设置的第一连杆、第二转动副、第二连杆以及第三转动副;所述第一连杆的一端通过第一转动副与定平台转动连接,所述第一连杆的另一端通过第二转动副与第二连杆转动连接;所述第二连杆为t型连杆,所述第二连杆分别活动连接第一连杆、第二支链远离定平台的一端以及第三支链远离定平台的一端;所述第三转动副安装在动平台上。
6.进一步的,所述第一转动副、第二转动副以及第三转动副互相垂直,所述第一转动副轴线平行于x轴;
所述第二转动副轴线沿y轴方向;所述第三转动副轴线沿z轴方向。
7.进一步的,所述第二支链包括顺次设置的第四连杆、第一球副、第五连杆以及第二球副,所述第四连杆一端通过第一移动副与定平台滑动连接,所述第四连杆的另一端通过第一球副与第五连杆的一端转动连接;所述第二球副安装在第二连杆上,所述第二连杆通过第二球副与第五连杆转动连接。
8.进一步的,第一移动副的轴线沿x轴方向,所述第一移动副的移动轴线与第一转动副的轴线重合。
9.进一步的,所述第三支链包括顺次设置的第六连杆、第四转动副、第七连杆、第三移动副,第八连杆、第五转动副、第九连杆,所述第八连杆、第九连杆、第十连杆均为“v”形连杆;所述第九连杆远离第五转动副的一端分别设置有第四移动副和第五移动副,所述第四移动副安装在第二连杆上,所述第九连杆通过第四移动副与第二连杆活动连接;所述第五移动副与第九连杆活动连接,所述第五移动副远离第九连杆的一侧依次活动连接有第十连杆和第一螺旋副;所述第一螺旋副安装在动平台上,所述第一螺旋副与第十连杆的一端活动连接;所述第十连杆的另一端通过第五移动副与第九连杆活动连接。
10.进一步的,所述第一转动副、第二转动副、第三转动副轴线相交于xyz三维坐标系的坐标系原点o,所述第五转动副、第四转动副相交于点o,第一螺旋副轴线过点o,所述第二移动副、第一移动副、第四移动副运动方向过点o。
11.进一步的,所述第二移动副移动轴线、第四转动副均与所述第一转动副的轴线与重合;所述第四转动副的轴线、第四五移动副的运动方向与第三移动副的夹角均为45
°
;所述第五转动副的轴线与第四移动副的运动方向和第二转动副的轴线重合;所述第五移动副的运动方向分别与第四移动副的运动方向、第一螺旋副的轴线的夹角均为45
°
;所述第一螺旋副的轴线与第三转动副的轴线重合。
12.本发明的有益效果在于,本发明通过驱动副第一转动副控制动平台绕第一转动副的轴线转动,通过驱动副第一移动副控制动平台绕第二转动副的轴线转动,通过驱动副第二移动副控制动平台绕第三转动副的轴线转动,将驱动电机分别设置在第一转动副、第一移动副、第二移动副上,而第一转动副、第一移动副、第二移动副均连接有驱动电机,且驱动电机均安装在定平台上,同时本发明并联机构3个驱动电机控制机构使用欧拉角表示的空间转动运动,每一个电机均单独控制一个欧拉角的转动运动,具有动态性能好、可控性能强的特点,减少了运动构件的运动惯量,提高了机构的动态运动性能,3个转动运动完全独立,提升了球面3r机构的控制性能。克服
了驱动电机由于设置在运动构件上使其动态性能降低,且使一般球面3r并联机构的运动控制复杂等问题。
13.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
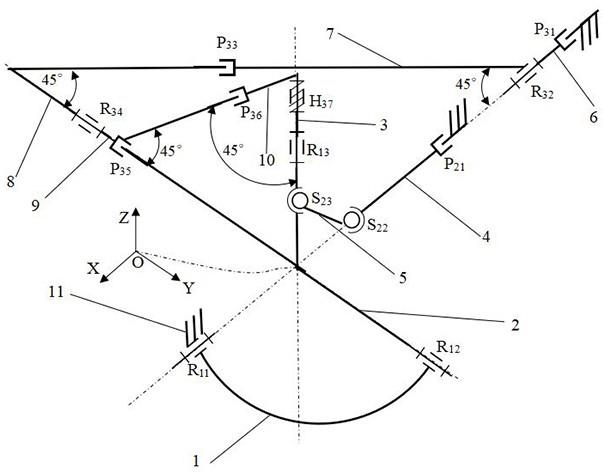
14.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1为本发明实施例中一种完全解耦的球面3r转动并联机构结构示意图,其中,1-第一连杆,2-第二连杆,3-动平台,4-第四连杆,5-第五连杆,6-第六连杆,7-第七连杆,8-第八连杆,9-第九连杆,10-第十连杆,11-定平台,r11-第一转动副,r12-第二转动副,r13-第三转动副,r32-第四转动副,r34-第五转动副,p21-第一移动副,p31-第二移动副,p33-第三移动副,p35-第四移动副,s22-第一球副,s23-第二球副,p36-第五移动副,h37-第一螺旋副。
具体实施方式
15.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
16.根据附图1所示的一种完全解耦的球面3r转动并联机构,包括定平台11、动平台3以及设置在定平台11和动平台3之间的三条运动支链,所述定平台11上分别设置有第一转动副r11、第一移动副p21、第二移动副p31;所述第一转动副r11、第一移动副p21、第二移动副p31均安装在定平台11上,所述第一转动副r11、第一移动副p21、第二移动副p31分别连接有驱动电机;所述运动支链包括第一支链、第二支链和第三支链,所述第一支链的一端、第二支链一端和第三支链的一端分别通过第一转动副r11、第一移动副p21、第二移动副p31与定平台上11活动连接;所述第一支链的另一端与动平台3活动连接;所述第二支链的另一端活动连接在第一支链上;所述第三支链远离定平台11的一端分别与第一支链和动平台3活动连接。
17.在本发明的一个实施例中,所述第一支链包括顺次设置的第一连杆1、第二转动副r12、第二连杆2以及第三转动副r13;所述第一连杆1的一端通过第一转动副r11与定平台11转动连接,所述第一连杆1的另一端通过第二转动副r12与第二连杆2转动连接;所述第二连杆2为t型连杆,所述第二连杆2分别活动连接第一连杆1、第二支链远离定平台11的一端以及第三支链远离定平台11的一端;所述第三转动副r13安装在动平台3上。
18.在本发明的一个实施例中,所述第一转动副r11、第二转动副r12以及第三转动副r13互相垂直,所述第一转动副r11轴线平行于x轴;所述第二转动副r12轴线沿y轴方向;
所述第三转动副r13轴线沿z轴方向。
19.在本发明的一个实施例中,所述第二支链包括顺次设置的第四连杆4、第一球副s22、第五连杆5以及第二球副s23,所述第四连杆4一端通过第一移动副p21与定平台11滑动连接,所述第四连杆4的另一端通过第一球副s22与第五连杆5的一端转动连接;所述第二球副s23安装在第二连杆2上,所述第二连杆通过第二球副s23与第五连杆5转动连接。
20.在本发明的一个实施例中,第一移动副p21的轴线沿x轴方向,所述第一移动副p21的移动轴线与第一转动副r11的轴线重合。
21.在本发明的一个实施例中,所述第三支链包括顺次设置的第六连杆6、第四转动副r32、第七连杆7、第三移动副p33,第八连杆8、第五转动副r34、第九连杆9,所述第八连杆8、第九连杆9、第十连杆10都为“v”形连杆;所述第九连杆9远离第五转动副r34的一端分别设置有第四移动副p35和第五移动副p36,所述第四移动副p35安装在第二连杆2的第三个连接端,所述第九连杆9通过第四移动副p35与第二连杆活动连接;所述第五移动副p36与第九连杆9活动连接,所述第五移动副p36远离第九连杆9的一侧依次活动连接有第十连杆10和第一螺旋副h37;所述第一螺旋副h37安装在动平台3上,所述第一螺旋副h37与第十连杆10的一端活动连接;所述第十连杆10的另一端通过第五移动副p36与第九连杆9活动连接。
22.在本发明的一个实施例中,所述第一转动副r11、第二转动副r12、第三转动副r13轴线相交于xyz三维坐标系的坐标系原点o,所述第五转动副r34、第四转动副r32相交于点o,第一螺旋副h37轴线过点o,所述第二移动副p31、第一移动副p21、第四移动副p35运动方向过点o。
23.在本发明的一个实施例中,所述第二移动副p31移动轴线、第四转动副r32均与所述第一转动副r11的轴线与重合;所述第四转动副r32轴线、第四移动副p35的运动方向与第三移动副p33的夹角均为45
°
;所述第五转动副r34的轴线与第四移动副p35的运动方向和第二转动副r12的轴线重合;所述第五移动副p36的运动方向分别与第四移动副p35的运动方向、第一螺旋副h37轴线的夹角为45
°
;所述第一螺旋副h37轴线与第三转动副r13的轴线重合。
24.需要说明的是,本发明中所述的球面3r转动并联机构指的是球面三自由度转动并联机构;本发明在定平台11上分别设置三个驱动电机,即,三个驱动电机分别连接三个运动链,三个驱动电机分别驱动三个支链使并联机构的动平台3可以实现以o点为中心进行三自由度转动,且此三自由度运动是完全解耦的,即动平台3的转动特征与第一转动副r11、第二转动副r12和第三转动副r13的转动轴一一对应。
25.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1