用于墙体检测的仿生机器人、图像处理装置及工作方法
1.本发明涉及到一种仿生机器人,具体涉及到一种用于墙体检测的爬壁仿生机器人;
2.本发明还涉及到一种图像处理装置,具体涉及到一种用于墙体检测的仿生机器人的图像处理装置;
3.同时本发明还涉及到一种仿生机器人的工作方法,具体涉及到一种用于墙体检测的仿生机器人的工作方法。
背景技术:
4.爬壁机器人在民用、航天上具有广泛的用途,因而越来越受到人们的重视。在民用领域,爬壁机器人被用来清洗大厦外壁墙面和玻璃、监测舰船船体、监测核密封灌等;在航天领域,爬行机器人可用来进行舱外维修等。但传统爬壁机器人的吸附原理和移动机理与真实壁虎关系不大。传统爬壁机器人的吸附结构主要采用磁力吸附、真空吸附、静电吸附和化学粘附四种方式。上述方式都存在各自的缺陷:磁力吸附要求壁面必须是磁体材料;真空吸附在壁面凹凸不平和多孔状况下吸附能力下降很快而且不能应用于真空环境;静电吸附要求被接触表面具有导电特性,由于静电力十分小,往往不能提供足够的粘附力;化学粘附时较容易挥发、固化,使得粘胶迅速被消化而影响粘附。此外,所有这些黏附方式都无法适用于于布满灰尘且崎岖不平的墙体表面。传统爬壁机器人的行走方式主要是吸盘式、车轮式和履带式。吸盘式能跨越很小的障碍,但移动速度比较慢;车轮式移动速度快、控制灵活,但维持一定的吸附能力比较困难;履带式对壁面的适应性强,着地面积大,但不容易转弯,而这三种方式的跨越障碍能力都很弱。另外,传统的爬壁机器人的图像采集模块的智能化程度不高,无法对采集的图像进行处理分析,或需要将采集的原始数据传输到另外的分析装置上进行分析得出结果,这样会导致检测浪费时间,无法提高检测效率。
5.中国专利(公开号:cn111493732a)公开了一种仿壁虎擦玻璃机器人,腿部结构为三连杆结构;为了实现腿部结构的前后和左右方向的运动,前弯板8上安装有驱动大腿根4 转动的第一舵机101,大腿根4上安装有驱动大腿3转动的第二舵机102,大腿3上安装有驱动小腿2转动的第三舵机103,小腿2上安装有驱动仿生掌上的拉绳26动作的第四舵机104。上述技术方案需要多个驱动电机才能够实现腿部结构的运动,这样的方式会导致腿部结构复杂且控制难度大,同时也会导致腿部结构整体质量的增加,会降低机器人的灵活性。
技术实现要素:
6.本发明的目的是针对现有技术存在的问题,提供一种方便控制、行走灵活且使用方便的一种用于墙体检测的仿生机器人、图像处理装置以及工作方法。
7.为实现上述目的,本发明采用的技术方案是:用于墙体检测的仿生机器人包括主体、行走系统、检测系统以及控制系统;主体,所述主体包括前主体、中主体、后主体,所述前主体、后主体可摆动的连接到中主体上;行走系统,所述行走系统包括支腿装置和吸附装
置,所述支腿装置可摆动的连接在后主体和前主体上,所述吸附装置连接在所述支腿装置上;检测系统,所述检测系统设置在所述前主体上;控制系统,所述控制系统控制所述行走系统行走;所述支腿装置包括驱动连杆和固定连杆,所述驱动连杆的一端分别与所述后主体和前主体铰接,所述驱动连杆另一端与固定连杆的一端铰接,所述固定连杆的另一端与所述吸附装置固定连接,所述驱动连杆可带动固定连杆沿前后方向和左右方向移动。
8.上述技术方案中,行走系统包括驱动连杆和固定连杆,通过驱动所述驱动连杆可带动固定连杆沿前后方向和左右方向移动,实现仿生机器人的行走模块更加灵活,且行走的结构更加简单紧凑的完成所需的动作形态,通过主体之间的转动连接,可以实现仿生机器人的灵活转向,从而提高仿生机器人的灵活性。
9.作为对上述技术方案进一步地改进,驱动连杆与所述固定连杆组成四连杆机构,所述驱动连杆包括第一连杆、第二连杆以及第三连杆,所述第一连杆与第一驱动装置的驱动端连接;所述第三连杆与第二驱动装置的驱动端连接。
10.为了实现仿生机器人的灵活转向且方便控制,作为对上述技术方案进一步地改进,所述前主体与所述中主体之间可转动连接,所述前主体与所述中主体之间设置有第三驱动装置,所述第三驱动装置驱动所述前主体相对于所述中主体转动。
11.为了提高仿生机器人的对墙壁的附着能力,同时实现支腿装置与吸附装置的协同动作。作为对上述技术方案进一步地改进,所述吸附装置包括第四驱动装置、限位组件和脚掌结构,所述第四驱动装置驱动脚掌结构上下往复运动。
12.为了提高仿生机器人的对墙壁的附着能力,同时实现支腿装置与吸附装置的协同动作。作为对上述技术方案进一步地改进,脚掌结构包括底座、连接件、摆动件、脚趾,所述脚趾一端铰接到底座的侧壁上,所述脚趾的另一端与摆动件的一端铰接,所述摆动件的另一端与所述连接件铰接;所述限位组件包括限位套筒和限位杆,所述限位套筒上设置有第四驱动装置,所述底座和连接件固定在所述限位杆上,所述限位杆可滑动地套接在限位套筒上,所述第四驱动装置与所述连接件连接,驱动所述脚掌结构上下往复运动。
13.作为对脚掌结构的替代方式,脚掌结构包括连接件、吸盘,所述限位组件包括限位套筒和限位杆,所述限位套筒上设置有第四驱动装置,所述吸盘和连接件固定在所述限位杆上,所述限位杆可滑动地套接在限位套筒上,所述第四驱动装置与所述连接件连接,驱动所述脚掌结构上下往复运动。
14.为了提高仿生机器人的检测模块检测的精确度,同时实现检测系统能够对图像进行分析,增强仿生机器人使用的方便性。所述图像处理装置包括:图像采集模块、图像处理模块以及图像分析模块;所述图像采集模块对墙面的环境进行采集;所述图像处理模块包括图像分帧与均衡化单元和图像滤波与边缘处理单元,所述图像分帧与均衡化单元对图像进行分帧后,再进行图像灰度化和锐度增强,最后进行直方图均衡化处理;所述图像滤波与边缘处理单元将直方图均衡化处理后的图像进行中值滤波以及高斯滤波后,再进行拉普拉斯算子边缘增强,最后得到目标数据集;所述图像分析模块通过训练学习,形成缺陷数据集,所述目标数据集输入所述图像分析模块后,与所述缺陷数据集进行对比形成分析信息,所述图像分析模块将分析信息传输给控制系统,所述控制系统将所述分析信息实时显示到移动终端上。
15.为了提高图像分析的准确性,作为对上述技术方案进一步地改进,所述图像分析
模块通过卷积神经网络进行训练,结合数据库系统,收集每次作业的检修数据,完成对缺陷数据集的补充。
16.为了提高图像分析的准确性,作为对上述技术方案进一步地改进,所述缺陷数据集先经过数据挖掘与扩充,再利用基于卷积神经网络框架对所述缺陷数据集进行优化和评估。
17.作为对上述仿生机器人的操作使用,所述使用步骤包括:(1)规划路径,根据墙体情况规划好路线;(2)仿生机器人上电;(3)控制器模块根据规划的路径,产生动作指令;(4)根据所述动作指令生产相应的行走指令和/或转向指令,对应的行走系统和/或主体完成相应步态动作;(5)到达指定位置,所述检测系统开始检测,并将检测到的信息经过分析判断后,将分析结果发送给控制系统,所述控制系统通过通讯模块将信息实时显示到移动终端上;(6)完成检测工作后,按照规划好的路线进行返回。
18.与现有技术相比,本发明的有益效果是:1、通过支腿装置包括驱动连杆和固定连杆,通过两个驱动装置驱动所述驱动连杆可带动固定连杆沿前后方向和左右方向移动,实现仿生机器人的行走模块更加灵活,且行走的结构更加简单紧凑能够完成所需的动作形态,通过主体之间的转动连接,可以实现仿生机器人的灵活转向,从而提高仿生机器人的灵活性; 2、通过前主体与所述中主体之间可转动连接并设置有第三驱动装置,所述第三驱动装置驱动所述前主体与所述中主体转动,实现仿生机器人的灵活转向且方便控制;3、通过图像处理装置包括:图像采集模块、图像处理模块以及图像分析模块;提高仿生机器人的检测模块检测的精确度,同时实现检测模块能够对图像进行分析,提高仿生机器人自动识别分析判断的准确性。
附图说明
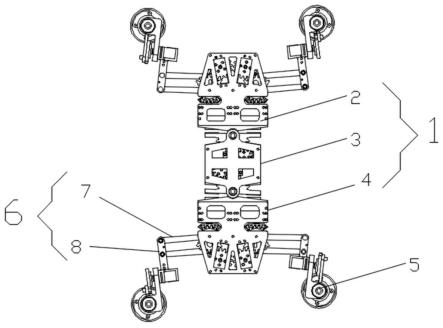
19.图1为本发明实施例一中仿生机器人整体结构示意图;
20.图2为本发明实施例一中行走系统的支腿装置的结构示意图,其中图(a)为支腿装置伸展状态示意图,图(b)为支腿装置收缩状态示意图;
21.图3为本发明实施例一中行走系统的一种吸附装置的结构示意图;其中图(a)为吸附装置吸附状态示意图,图(b)为吸附装置提升状态示意图;
22.图4为本发明实施例一中行走系统中吸附装置的替代结构的示意图,其中图(a)为吸附装置吸附状态示意图,图(b)为吸附装置提升状态示意图;
23.图5为本发明实施例一中主体的结构示意图,其中图(a)为主体去掉中间盖板的俯视结构示意图,图(b)为主体去掉中间盖板的正面主视结构示意图;
24.图6为本发明实施例一中主体中连接关系中的连接板的结构示意图;
25.图7为本发明实施例二中图像处理装置的示意图;
26.图8为本发明实施例二中图像处理装置中图像处理系统的示意图;
27.图9为本发明实施例二中图像处理装置中训练学习过程示意图;
28.图10为本发明实施例三中仿生机器人的工作过程流程图。
29.图中:1、主体;2、前主体;3、中主体;4、后主体;5、吸附装置;6、支腿装置; 7、第一连杆;8、固定连杆;9、第一齿轮;10、锥齿轮;11、第一电机;12、扇形齿轮;13、第二连杆;14、第二齿轮;15、第三连杆;16、第三电机;
30.201、前连接板;202、前销轴;203、前第三齿轮;401、后连接板;402、后销轴; 403、后第三齿轮;501、限位套筒;502、限位杆;503、连接件;504、摆动件;505、脚趾;506、底座;507、摇杆;508、驱动圆盘;509、吸盘;2012、前传动齿轮;4012、后传动齿轮。
具体实施方式
31.下面将结合本发明中的附图,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动条件下所获得的所有其它实施例,都属于本发明保护的范围。
32.实施例一:
33.如图1-6所示,用于墙体检测的仿生机器人的具体结构包括主体1、行走系统、检测系统以及控制系统,主体1包括前主体2、中主体3、后主体4;行走系统包括支腿装置6 和吸附装置5。
34.如图2所示,支腿装置6包括驱动连杆和固定连杆8,驱动连杆与固定连杆8组成四连杆结构。驱动连杆包括第一连杆7、第二连杆13以及第三连杆15,第一连杆7、第二连杆13远离前主体2的一端均与固定连杆8的一端铰接,固定连杆8的另一端与吸附装置5 固定连接。在前主体2上转动设置有第一齿轮9,第一齿轮9与锥齿轮10啮合,锥齿轮 10由第一电机11驱动,第一电机11固定安装在前主体2上,第一连杆7的一端与前主体 2可转动连接,并与第一齿轮9固定连接,通过第一齿轮9带动第一连杆7摆动。实现支腿装置的沿身体的前后方向运动,进而带动固定连杆8前后方向运动。同样,在前主体2 上转动设置有第二齿轮14,第二齿轮14与设置在第二连杆13上的扇形齿轮12啮合,第二齿轮14由第二电机驱动,第二电机固定安装在前主体2上,第二连杆13两端分别与第一连杆7和第三连杆15铰接,通过第二齿轮14带动第二连杆13摆动,进而带动第三连杆15的摆动,实现第三连杆15推动固定连杆8的延身体的左右方向运动。支腿装置的工作过程为,当第一电机11驱动第一连杆7沿身体的前后方向摆动,带动吸附装置5沿主体的前后方向摆动;当第二电机驱动第二连杆13转动,推动第三连杆15在主体的左右方向伸缩,进而带动吸附装置5沿身体的左右方向摆动。在第一、二电机的驱动下,完成行走系统在两个方向上的运动,模仿爬壁类动物(例如壁虎)的行走动作。
35.如图3所示,吸附装置5由第四驱动装置、限位组件和脚掌结构组成。第四驱动装置包括第四电机、驱动圆盘508、摇杆507,第四电机的输出端带动驱动圆盘508转动,驱动圆盘508上固定连接有摇杆507,在驱动圆盘508的带动下,摇杆507上下移动。限位组件包括限位套筒501和限位杆502,第四电机和驱动圆盘508固定安装在限位套筒501 上。脚掌结构包括底座506、连接件503、摆动件504、脚趾505,底座506与限位杆502 固定连接,脚趾505一端铰接到底座506的侧壁上,脚趾505的另一端与摆动件504的一端铰接,摆动件504的另一端与连接件503铰接,连接件503与摇杆507通过销轴等方式可转动连接在一起。当第四电机驱动圆盘508转动,带动摇杆507转动,摇杆507进而带动脚掌结构在限位杆502沿限位套筒501的限位孔上下往复运动。
36.作为对吸附装置5的替代方式,如图4所示,脚掌结构包括连接件503、吸盘509,吸盘的顶端固定连接在限位杆502的底端。当第四电机驱动圆盘508转动,带动摇杆507 转动,
摇杆507进而带动吸盘509在限位杆502沿限位套筒501的限位孔上下往复运动。如图4中图(a)所示,当吸盘509向下移动,与墙面接触,吸盘509继续向下移动,在在压力的作用下,排出吸盘509中的空气,使吸盘完全吸附在墙壁上。
37.作为吸盘吸附方式的替代,设置气压源(例如真空泵),气压源对吸盘509抽气,形成负压,使吸盘509吸附在墙壁上;当需要行走时,打开吸盘与大气连通的阀,使吸盘与大气连通,吸盘不会吸附。
38.在支腿装置与吸附装置相互协同的动作下,完成仿生机器人模拟壁虎在墙壁上的爬行动作,进而实现仿生机器人在墙壁上的爬壁行走。
39.如图1所示,本实施例中,在前主体2和后主体4的左右两侧分别对称设置有行走系统,各个行走系统的结构、工作原理均相同。
40.如图5-6所示,前主体2与中主体3通过前销轴202可转动连接,中主体3的底板上固定设置有第三电机16,第三电机16的输出端固定连接有前第三齿轮203。在前主体2 靠近中主体3的端面固定连接有前连接板201,在前连接板201的下端固定连接有前传动齿轮2012,前传动齿轮2012与前第三齿轮203啮合。第三电机16驱动前第三齿轮203转动,前第三齿轮203带动前传动齿轮2012转动,前传动齿轮2012与前连接板201固定连接,前连接板201与前主体2固定连接,从而带动前主体绕前销轴202转动。实现仿生机器人的前主体的摆动。后主体4与中主体3的连接方式结构、方式以及原理相同,即通过第三电机16驱动后第三齿轮403转动,后第三齿轮403带动后传动齿轮4012转动,后传动齿轮4012与后连接板401固定连接,后连接板401与后主体4固定连接,从而带动前主体绕后销轴402转动。实现仿生机器人的后主体的摆动。
41.作为前连接板201与前传动齿轮2012的固定连接方式的替代,如图6所示,前连接板201与前传动齿轮2012一体成型。
42.作为后传动齿轮4012与后连接板401固定连接的固定连接方式的替代,如图6所示,后传动齿轮4012与后连接板401一体成型。
43.实施例二:
44.为了提高仿生机器人的检测模块检测的精确度,同时实现检测系统能够对图像进行分析,增强仿生机器人使用的方便性。仿生机器人的检测系统可以设置成如下图像处理装置。
45.如图7-8所示,图像处理装置包括:图像采集模块、图像处理模块以及图像分析模块;所述图像采集模块主要由相机、照明灯组成,当图像采集模块检测到墙壁表面存在缺陷时,相机在照明灯的辅助下对墙壁进行拍摄,将采集到的信息通过pic标准总线传输到高速图像处理模块,高速图像处理模块基于计算机视觉库的图像预处理算法对墙壁的真实缺陷影像数据集进行了图像优化处理,保留了高频信号、滤除无关噪声、提高了图像质量,使得数据集中的特征更容易被识别。
46.图像优化处理步骤,包括图像分帧与均衡化单元和图像滤波与边缘处理单元,采集到的图像数据通过图像分帧与均衡化单元对图像进行分帧后,再进行图像灰度化和锐度增强,最后进行直方图均衡化处理;得到的图像数据再输出到图像滤波与边缘处理模块,图像滤波与边缘处理模块将直方图均衡化处理后的图像进行中值滤波以及高斯滤波后,再进行拉普拉斯算子边缘增强,最后得到目标数据集。所述图像分析系统通过训练学习,形成缺
陷数据集,所述目标数据集输入所述图像分析系统后,与缺陷数据集进行对比形成分析信息,所述图像分析模块将分析信息传输给控制系统,所述控制系统将所述分析信息实时显示到移动终端上。
47.为了提高图像分析的准确性,如图9所示,图像分析模块通过卷积神经网络进行训练学习。在卷积神经网络训练学习中,结合数据库系统,收集每次作业的检修数据,完成对缺陷数据集的补充,完善图像数据库。将改良后的缺陷数据集进行随机图像运算变换算法以及mosaic数据增强,完成数据挖掘与扩充后;将扩充后的数据集在利用基于caffe框架搭建的平台进行训练,在基于caffe框架搭建的平台的中,包括cspdarknet53的主干网络搭建、spp和panet网络的搭建以及预测网络yolo的搭建。完成在caffe框架平台的训练后,对网络进行评估和改进,从caffe框架平台到处各类的ap和map计算结果,对计算结果精度信息判断,若满足精度要求,则输出评估结果,完成对图像分析模块的训练学习。若不满足精度要求,侧通过参数修改和正则化对导出结果进行改进,并将改进后的结果导入到caffe框架平台,对caffe框架平台进行学习训练,直到导出计算结果达到精度要求。
48.经过训练学习的图像分析模块对采集到的缺陷信息进行分析,实时识别墙壁缺陷,上位机界面得到墙壁缺陷类别,将墙壁外的拍摄图像与数据库缺陷类别进行对比,反推其产生的原因和工艺步骤,实现对工艺的反馈和改进。
49.结合数据库系统,收集每次作业的检修数据,完成对缺陷数据集的补充,完善图像数据库,实时识别墙壁缺陷,上位机界面得到墙壁缺陷类别,将墙壁外的拍摄图像与数据库缺陷类别进行对比,反推其产生的原因和工艺步骤,实现对工艺的反馈和改进。
50.如图7所示,当图像分析模块分析的结果可以传输到作为控制系统的计算机上,计算机通过通讯控制系统中的模块将分析结果发送到指定的移动终端上。为了确定墙面缺陷的位置,图像采集模块和高速图像处理模块可以将图像数据传输到计算机上,计算机得到信息后,将信息传输产生工作指令,使行走系统开始动作,仿生机器人运动到指定的位置。同样的,计算机可以通过控制总线对图像采集模块进行控制。同时计算机也可以将图像数据传输到图像分析模块进行分析。
51.实施例三:
52.为了能够对仿生机器人进行操作,作为对上述仿生机器人的操作使用,所述使用步骤包括:仿生机器人能够通过无线遥控或自动运动方式进行控制。控制器模块采用stm32f407 单片机作为主控芯片,单片机能够同时控制14个电动机,实现仿生壁虎的运动控制:即腿部运动共有12个电动机,实现3个自由度的运动;身体部分有2个电动机,安装在主体之间,实现身体的扭动。控制系统中的单片机控制吸附装置配合腿部运动,实现吸附运动与腿部运动的协同。
53.首先规划路径,根据墙体情况规划好路线,仿生机器人上电,单片机根据规划的路径,产生动作指令;或根据缺陷检测系统的图像信息,对缺陷位置进行定位,单片机接收位置信息,产生动作指令。根据所述动作指令生产相应的行走指令和/或转向指令,对应的行走系统和/或主体完成相应步态动作。到达指定位置,计算机控制所述检测系统开始检测,通过缺陷检测系统对检测信息进行分析,并将分析信息发送给计算机,计算机通过通讯模块将信息实时传输到遥控器的显示屏或其他移动终端上。完成检测工作后,按照规划好的路线进行返回。
54.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1