一种设备组装用机械手臂的制作方法
1.本发明属于设备组装技术领域,尤其涉及一种设备组装用机械手臂。
背景技术:
2.汽车的排挡装置是由多个加工好的零部件逐步组装而成,传统手工组装的方法不但效率低,而且装配的精度差,次品率高;因此,需要使用到辅助组装设备对排挡杆的零部件进行自动化装配。
3.中国专利cn212705294u公开了一种用于汽车零配件组装加工的运送机械手,包括工业机械手,所述工业机械手包括控制机、第一机械臂、第二机械臂、第三机械臂、固定架、气缸、三组固定夹爪和定位盘,控制机的顶端转动设置有转座,第一机械臂转动安装在转座上,但是现有装置固定架以及固定夹爪的角度调节不灵活,使得装置工作范围受限,因此,我们提出一种设备组装用机械手臂。
技术实现要素:
4.现有装置固定架以及固定夹爪的角度调节不灵活,使得装置工作范围受限,因此,我们提出一种设备组装用机械手臂,所述设备组装用机械手臂包括夹持机械手臂,夹持机械手臂连接有用于调节所述夹持机械手臂位置的机械手臂调节机构,机械手臂调节机构包括升降调节组件、转动调节组件以及活动调节平台,升降调节组件、转动调节组件以及活动调节平台配合工作时满足了对夹持机械手臂不同运动路径和组装位置的调节,方便了对汽车加工中排挡装置的组装,提高了组装效率。
5.本发明是这样实现的,一种设备组装用机械手臂,所述设备组装用机械手臂包括:
6.手臂承托主体,所述手臂承托主体包括支撑基座以及设置在支撑基座上的组装工作臂;
7.可灵活调节位置的夹持机械手臂,所述夹持机械手臂用于对不同型号零部件夹持固定;
8.安装在组装工作臂上的机械手臂调节机构,与夹持机械手臂连接,用于调节所述夹持机械手臂的位置;
9.所述机械手臂调节机构包括:
10.升降调节组件,安装在组装工作臂内,用于调节夹持机械手臂的高度;
11.转动调节组件,设置在组装工作臂的一侧,且与升降调节组件连接,用于调节夹持机械手臂的倾斜角度和运动路径,以及
12.与转动调节组件配合工作的活动调节平台,所述活动调节平台与夹持机械手臂连接,且用于调节夹持机械手臂的活动自由度。
13.优选地,所述支撑基座与组装工作臂之间设置有用于调节所述组装工作臂高度的工作臂驱动件,工作臂驱动件固定安装在支撑基座上,所述组装工作臂上开设有用于安装并对升降调节组件限位的工作臂导向槽。
14.优选地,所述升降调节组件包括:
15.升降调节件,固定安装在组装工作臂上;
16.升降移动件,滑动安装在工作臂导向槽内,且与升降调节件之间固定连接,并可拆卸连接有所述转动调节组件。
17.优选地,所述转动调节组件包括:
18.转动调节件,用于调节所述夹持机械手臂的倾斜角度,配合对不同形状零部件的夹持组装;
19.设置在转动调节件一侧的转动摆动件,转动摆动件内开设有摆动导向槽,以及
20.安装在转动摆动件上的路径改变机构,用于改变所述夹持机械手臂的运动路径。
21.优选地,所述路径改变机构包括:
22.路径改变驱动件,固定安装在转动摆动件上;
23.与路径改变驱动件固定连接的路径改变移动件,路径改变移动件滑动安装在摆动导向槽内,且路径改变移动件固定连接有活动调节平台。
24.优选地,所述活动调节平台包括:
25.调节平台安装座;
26.至少一组活动调节部,活动调节部通过虎克铰安装在调节平台安装座上,以及
27.与活动调节部铰接的活动调节座,活动调节座的一侧固定安装有夹持机械手臂。
28.优选地,所述夹持机械手臂包括:
29.夹持机械部,用于夹持不同型号的零部件,辅助设备的组装;
30.机械手臂限位座,机械手臂限位座内开设有多组工作槽;
31.机械部驱动件,固定安装在机械手臂限位座内,用于调节所述夹持机械部的位置。
32.优选地,所述夹持机械手臂还包括用于调节所述夹持机械部夹持范围的夹持范围调节组件,所述夹持范围调节组件包括:
33.范围调节安装座,与机械部驱动件固定连接,且滑动安装在机械手臂限位座内,以及
34.安装在范围调节安装座上的夹持范围调节部。
35.优选地,所述夹持范围调节部包括:
36.至少一组夹持范围驱动件,固定安装在范围调节安装座上;
37.与夹持范围驱动件固定连接的夹持范围移动件,以及
38.固定安装在夹持范围移动件上的夹持范围辅助件,夹持范围辅助件与夹持机械部之间连接,用于辅助对夹持机械部夹持范围的调节。
39.优选地,所述夹持机械部包括:
40.主夹持机械件;
41.与主夹持机械件固定连接且相互配合的辅助夹持机械件,以及
42.用于保护零部件的零部件保护部,零部件保护部固定安装在辅助夹持机械件上。
43.与现有技术相比,本技术实施例主要有以下有益效果:
44.本发明实施例公开了升降调节组件、转动调节组件以及活动调节平台,且升降调节组件、转动调节组件以及活动调节平台配合工作时满足了对夹持机械手臂不同运动路径和组装位置的调节,方便了对汽车加工中排挡装置的组装,提高了组装效率。
附图说明
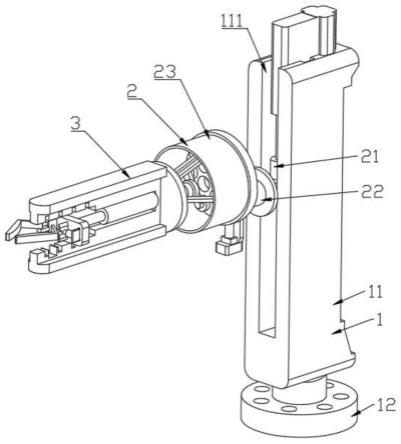
45.图1是本发明提供的一种设备组装用机械手臂的结构示意图。
46.图2是本发明的轴测图。
47.图3是本发明的主视图。
48.图4是本发明的侧视图。
49.图5是本发明的俯视图。
50.图6是本发明提供的手臂承托主体的结构示意图。
51.图7是本发明提供的手臂承托主体的结构示意图。
52.图8是本发明提供的手臂承托主体的俯视图。
53.图9是本发明提供的夹持机械手臂的结构示意图。
54.图10是本发明提供的夹持机械手臂的轴测图。
55.图11是本发明提供的夹持机械手臂的主视图。
56.图中:1-手臂承托主体、11-组装工作臂、111-工作臂导向槽、112-操作控制器、12-支撑基座、121-工作臂驱动件、2-机械手臂调节机构、21-升降调节组件、211-升降调节件、212-升降移动件、22-转动调节组件、221-转动调节件、222-转动摆动件、223-路径改变驱动件、224-路径改变移动件、23-活动调节平台、231-调节平台安装座、232-虎克铰、233-活动调节部、234-活动调节座、3-夹持机械手臂、31-机械手臂限位座、32-机械部驱动件、33-夹持范围调节组件、331-范围调节安装座、332-夹持范围驱动件、333-夹持范围移动件、334-夹持范围辅助件、34-夹持机械部、341-主夹持机械件、342-辅助夹持机械件、343-零部件保护部。
具体实施方式
57.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术技术领域的技术人员通常理解的含义相同;本文中在申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术;本技术的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。本技术的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。
58.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
59.现有装置固定架以及固定夹爪的角度调节不灵活,使得装置工作范围受限,因此,我们提出一种设备组装用机械手臂,所述设备组装用机械手臂包括夹持机械手臂3,夹持机械手臂3连接有用于调节所述夹持机械手臂3位置的机械手臂调节机构2,机械手臂调节机构2包括升降调节组件21、转动调节组件22以及活动调节平台23,升降调节组件21、转动调节组件22以及活动调节平台23配合工作时满足了对夹持机械手臂3不同运动路径和组装位置的调节,方便了对汽车加工中排挡装置的组装,提高了组装效率。
60.本发明实施例提供了一种设备组装用机械手臂,用于汽车零部件加工,如图1-5所
示,所述设备组装用机械手臂包括:
61.手臂承托主体1,所述手臂承托主体1包括支撑基座12以及设置在支撑基座12上的组装工作臂11;
62.可灵活调节位置的夹持机械手臂3,所述夹持机械手臂3用于对不同型号零部件夹持固定;
63.安装在组装工作臂11上的机械手臂调节机构2,与夹持机械手臂3连接,用于调节所述夹持机械手臂3的位置。
64.本实施例中,支撑基座12为矩形座或圆座,且支撑基座12采用高锰钢或电木制得,同时为了方便对本发明实施例的安装,支撑基座12的底部开设有预设多边形开槽,用于安装紧固螺母,且支撑基座12的周边开设有多组辅助紧固槽,辅助紧固槽用于安装辅助紧固螺栓,方便了本发明实施例的安装和工作。
65.本实施例中,工作时,需要对汽车排挡装置或其他机构进行组装时,然后开启机械手臂调节机构2,机械手臂调节机构2带动夹持机械手臂3在不同路径以及不同位置对零部件进行夹持,方便了对设备的组装。
66.在本实施例中,所述机械手臂调节机构2包括:
67.升降调节组件21,安装在组装工作臂11内,用于调节夹持机械手臂3的高度;
68.转动调节组件22,设置在组装工作臂11的一侧,且与升降调节组件21连接,用于调节夹持机械手臂3的倾斜角度和运动路径,以及
69.与转动调节组件22配合工作的活动调节平台23,所述活动调节平台23与夹持机械手臂3连接,且用于调节夹持机械手臂3的活动自由度。
70.在本实施例中,工作时,开启升降调节组件21,升降调节组件21能够带动夹持机械手臂3的高度,满足了不同位置的组装需求,同时升降调节组件21带动转动调节组件22运动,进而满足了设备不同位置零部件搬运以及设备组装的要求,进一步的活动调节平台23进一步释放了所述夹持机械手臂3的活动范围,提高了设备组装效率。
71.本发明实施例公开了升降调节组件21、转动调节组件22以及活动调节平台23,且升降调节组件21、转动调节组件22以及活动调节平台23配合工作时满足了对夹持机械手臂3不同运动路径和组装位置的调节,方便了对汽车加工中排挡装置的组装,提高了组装效率。
72.本发明进一步较佳实施例中,如图6-8所示,所述支撑基座12与组装工作臂11之间设置有用于调节所述组装工作臂11高度的工作臂驱动件121,工作臂驱动件121固定安装在支撑基座12上,所述组装工作臂11上开设有用于安装并对升降调节组件21限位的工作臂导向槽111。
73.在本实施例中,为了方便对装置的控制,在组装工作臂11上固定安装有用于控制装置中各个部件运行的操作控制器112,操作控制器112内置编程plc控制器以及触控式操作屏,方便了对装置的操控。
74.本实施例中,组装工作臂11为竖直设置的矩形座,且组装工作臂11具体为不锈高锰钢材质,从而避免了组装工作臂11的损坏,而工作臂导向槽111为“工”字型或“t”字型竖直槽结构,从而实现了对升降调节组件21的限位,保证了升降调节组件21以及夹持机械手臂3的正常工作。
75.在本实施例中,工作臂驱动件121的底部通过紧固螺栓或无缝焊接的方式固定安装,且工作臂驱动件121具体为液压缸、气缸或电动推杆,工作臂驱动件121电性连接有操作控制器112。
76.本发明进一步较佳实施例中,如图6所示,所述升降调节组件21包括:
77.升降调节件211,固定安装在组装工作臂11上;
78.升降移动件212,滑动安装在工作臂导向槽111内,且与升降调节件211之间固定连接,并可拆卸连接有所述转动调节组件22。
79.在本实施例中,升降调节件211电性连接有操作控制器112,升降调节件211具体为电动推杆,且升降调节件211的输出端榫接有升降移动件212,升降移动件212具体为合金材质滑块,升降移动件212的一侧通过铆钉固定连接有转动调节组件22。
80.工作时,开启升降调节件211,升降调节件211带动升降移动件212上下移动,从而使得升降移动件212带动夹持机械手臂3上下移动,利于设备的组装。
81.本发明进一步较佳实施例中,如图6所示,所述转动调节组件22包括:
82.转动调节件221,用于调节所述夹持机械手臂3的倾斜角度,配合对不同形状零部件的夹持组装;
83.设置在转动调节件221一侧的转动摆动件222,转动摆动件222内开设有摆动导向槽,以及
84.安装在转动摆动件222上的路径改变机构,用于改变所述夹持机械手臂3的运动路径。
85.在本实施例中,转动调节件221为三相异步电机,且转动调节件221通过数据连接有操作控制器112,转动调节件221的输出端过盈配合连接有转动摆动件222,转动摆动件222为摆动臂。
86.工作时,开启转动调节件221,转动调节件221带动转动摆动件222转动,从而使得转动摆动件222带动路径改变机构以及夹持机械手臂3移动,方便了对设备的组装以及零部件的转运。
87.本发明进一步较佳实施例中,如图1-3所示,所述路径改变机构包括:
88.路径改变驱动件223,固定安装在转动摆动件222上;
89.与路径改变驱动件223固定连接的路径改变移动件224,路径改变移动件224滑动安装在摆动导向槽内,且路径改变移动件224固定连接有活动调节平台23。
90.在本实施例中,路径改变驱动件223通过紧固螺栓或卡箍固定安装,且摆动导向槽为矩形槽结构,路径改变移动件224为滑块,工作时,需要调节夹持机械手臂3的位置时,开启路径改变驱动件223,路径改变驱动件223带动路径改变移动件224移动,从而实现了对夹持机械手臂3位置的调节。
91.本发明进一步较佳实施例中,如图9所示,所述活动调节平台23包括:
92.调节平台安装座231;
93.至少一组活动调节部233,活动调节部233通过虎克铰232安装在调节平台安装座231上,以及
94.与活动调节部233铰接的活动调节座234,活动调节座234的一侧固定安装有夹持机械手臂3。
95.在本实施例中,调节平台安装座231为圆座或矩形座,且活动调节部233在调节平台安装座231上周向设置,且活动调节部233至少设置有三组,每组所述活动调节部233包括一组或两组倾斜设置的电动推杆,电动推杆相互配合工作,能够实现夹持机械手臂3的多自由度位置调节,而活动调节座234为内部中空的圆环或圆板结构,活动调节座234的一侧通过虎克铰232连接有电动推杆。
96.本发明进一步较佳实施例中,如图9-11所示,所述夹持机械手臂3包括:
97.夹持机械部34,用于夹持不同型号的零部件,辅助设备的组装;
98.机械手臂限位座31,机械手臂限位座31内开设有多组工作槽;
99.机械部驱动件32,固定安装在机械手臂限位座31内,用于调节所述夹持机械部34的位置。
100.在本实施例中,机械手臂限位座31“工”字钢或矩形座,机械部驱动件32通过螺栓固定安装,机械部驱动件32为液压缸或电动推杆,需要调节夹持机械部34的位置时,开启机械部驱动件32,机械部驱动件32带动夹持机械部34移动,方便了设备的组装。
101.本发明进一步较佳实施例中,如图9-11所示,所述夹持机械手臂3还包括用于调节所述夹持机械部34夹持范围的夹持范围调节组件33,所述夹持范围调节组件33包括:
102.范围调节安装座331,与机械部驱动件32固定连接,且滑动安装在机械手臂限位座31内,以及
103.安装在范围调节安装座331上的夹持范围调节部。
104.在本实施例中,范围调节安装座331通过卡扣或铆钉与机械部驱动件32固定连接,范围调节安装座331具体为矩形座或圆座,需要对夹持机械部34的夹持范围进行微调时,开启夹持范围调节部,夹持范围调节部带动夹持机械部34运动,进而实现了对夹持机械部34夹持范围的调节。
105.本发明进一步较佳实施例中,如图9所示,所述夹持范围调节部包括:
106.至少一组夹持范围驱动件332,固定安装在范围调节安装座331上;
107.与夹持范围驱动件332固定连接的夹持范围移动件333,以及
108.固定安装在夹持范围移动件333上的夹持范围辅助件334,夹持范围辅助件334与夹持机械部34之间连接,用于辅助对夹持机械部34夹持范围的调节。
109.在本实施例中,夹持范围驱动件332为液压缸或气缸,且夹持范围移动件333为移动滑块,移动滑块的一侧通过螺栓固定连接有夹持范围辅助件334,夹持范围辅助件334具体为伺服电机,且伺服电机的输出端与夹持机械部34之间固定连接。
110.本发明进一步较佳实施例中,如图9-11所示,夹持机械部34包括:
111.主夹持机械件341;
112.与主夹持机械件341固定连接且相互配合的辅助夹持机械件342,以及
113.用于保护零部件的零部件保护部343,零部件保护部343固定安装在辅助夹持机械件342上。
114.主夹持机械件341为倾斜设置夹板或夹持杆,其采用铝合金或钛合金材质,主夹持机械件341通过卡扣或一体式连接辅助夹持机械件342,而零部件保护部343具体为缓冲板,缓冲板嵌装或螺栓固定安装在辅助夹持机械件342内,缓冲板采用弹性体或橡胶材质制得。
115.在本实施例中,为了全方位对零部件进行夹持,避免零部件的脱落,工作槽水平开
设有多组,且工作槽内设置有止动气缸,启动气缸与夹持机械部34配合工作,实现了对零部件的夹持固定,方便了设备的安装。
116.综上所述,本发明提供了一种设备组装用机械手臂,本发明实施例公开了升降调节组件21、转动调节组件22以及活动调节平台23,且升降调节组件21、转动调节组件22以及活动调节平台23配合工作时满足了对夹持机械手臂3不同运动路径和组装位置的调节,方便了对汽车加工中排挡装置的组装,提高了组装效率。
117.需要说明的是,对于前述的各实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本发明并不受所描述的动作顺序的限制,因为依据本发明,某些步骤可能采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,涉及的动作和模块并不一定是本发明所必须的。
118.本技术所提供的几个实施例中,应该理解到,所揭露的装置,可通过其他的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如上述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或通信连接可以是通过一些接口,装置或单元之间的间接耦合或通信连接,可以是电信或者其它的形式。
119.上述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
120.以上实施例仅用以说明本发明的技术方案,而非对发明的保护范围进行限制。显然,所描述的实施例仅仅是本发明部分实施例,而不是全部实施例。基于这些实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明所要保护的范围。尽管参照上述实施例对本发明进行了详细的说明,本领域普通技术人员依然可以在不冲突的情况下,不作出创造性劳动对本发明各实施例中的特征根据情况相互组合、增删或作其他调整,从而得到不同的、本质未脱离本发明的构思的其他技术方案,这些技术方案也同样属于本发明所要保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1