一种仿人双臂机器人及其拟人协作路径规划方法
1.本发明涉及双臂协作机器人领域,尤其涉及一种仿人双臂机器人及其拟人协作路径规划方法。
背景技术:
2.协作机器人技术近年来发展迅速,相比传统的工业机器人,协作机器人部署过程简单、灵活小巧且成本低,广泛应用于工业自动化、养老助残、家庭服务等场景。随着我国人口老龄化的加剧和劳动力成本的逐年攀升,协作机器人在商场、医疗、探险及特殊环境中的应用前景也越来越广阔。与单臂机器人相比,双臂协作机器人不是机械臂数量上的简单叠加,而是通过双臂互相协调配合完成更加复杂、灵活和精细的操作。
3.双臂协作机器人的关键点在于“协作”,体现在双臂之间的位姿和力约束关系。双臂机器人协作的控制程序较为复杂,繁琐的编程增加了用户的使用负担。此外,现有的双臂协作机器人通常应用在与人类隔离的场景,在形态的拟人化和操作行为的拟人化方面有所欠缺。在需求日益增长的教育、陪护场景中,双臂协作机器人应尽可能的逼近人类的形态和行为。因此,理想的双臂协作机器人在人类的生活环境中,不仅需要完成特定的操作任务,还要能够呈现拟人化的行为。以上需求仅靠传统的视觉传感器和基于模型的操作规划方法是难以实现的。例如,传统的视觉仅能提供环境和目标位置信息,为双臂机器人的动作决策提供依据,但如何生成抓取复杂物体的拟人姿态和路径仍存在很大挑战。
4.本发明要解决的问题是如何提供一种仿人双臂机器人的拟人协作路径规划方法,兼顾双臂协作机器人的自主化和拟人化。因此,本领域的技术人员致力于开发一种仿人双臂机器人及其拟人协作路径规划方法,通过仿人的外观、手臂关节自由度配置、头部构造及立体双目视觉模拟人类的形态,赋予仿人双臂机器人目标物属性识别与跟踪、手眼协调、拟人抓取路径规划与双臂协作等功能,最终实现拟人的双臂协作与操作行为。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是通过仿人的外观、手臂关节自由度配置、头部构造及立体双目视觉模拟人类的形态,赋予仿人双臂机器人目标物属性识别与跟踪、手眼协调、拟人抓取路径规划与双臂协作等功能,最终实现拟人的双臂协作与操作行为。
6.为实现上述目的,本发明提供了一种仿人双臂机器人,其特征在于,包括头部模块、双机械臂和躯干,其中,所述头部模块包括双目立体视觉组件、两自由度颈部和中心板;所述双目立体视觉组件包括第一驱动结构、第二驱动结构、眼眶和眼球,所述第一驱动结构与所述中心板相连,所述第一驱动结构用于驱动所述眼球的左右运动,所述第二驱动结构与所述中心板相连,所述第二驱动结构用于驱动所述眼眶做仰俯运动;所述头部模块通过所述两自由度颈部与所述躯干相连,所述两自由度颈部与所述中心板相连,所述两自由度颈部能驱动所述中心板做往复圆周运动和头部俯仰运动,所述双机械臂与所述躯干相连。
7.进一步地,所述眼球为仿人眼,所述眼球数量为2个,所述双目立体视觉组件还包括眼眶支架,所述眼眶支架与所述中心板和所述眼眶相连,所述第一驱动结构包括2个第一直线电机、第一安装板、第一固定板,所述第一直线电机安装在所述第一安装板上,由所述第一固定板固定,所述眼眶与所述第一安装板相连,2个所述第一直线电机分别驱动2个所述眼球的左右运动。
8.进一步地,所述第一驱动结构还包括第一直线电机连接件和第一连杆,所述第一直线电机连接件与所述第一直线电机的电机轴相连,所述第一直线电机连接件与所述眼球通过所述第一连杆相连。
9.进一步地,所述第二驱动结构包括第二直线电机、第二直线电机连接件、第二连杆、异形连杆、第二安装板和第二固定板,所述第二直线电机固定在第二安装板上,所述第二直线电机由所述第二固定板固定在中心板上,所述第二直线电机连接件与所述第二直线电机的电机轴相连,所述第二直线电机连接件通过所述第二连杆与所述异形连杆相连,所述异形连杆与所述第一安装板相连,所述第二直线电机用于驱动所述眼眶做仰俯运动。
10.进一步地,所述两自由度颈部包括双轴舵机、双轴轴盘连接件、舵机中心板连接件和双轴舵机座,所述双轴舵机安装在所述双轴舵机座上,所述双轴舵机与所述双轴轴盘连接件相连,所述双轴轴盘连接件通过所述舵机中心板连接件与所述中心板相连,所述双轴舵机驱动所述中心板做头部俯仰运动。
11.进一步地,所述两自由度颈部还包括单轴舵机、单轴舵机座,所述单轴舵机座与所述躯干相连,所述单轴舵机安装在所述单轴舵机座上,所述双轴舵机座与所述单轴舵机相连,所述单轴舵机驱动所述中心板做往复圆周运动。
12.进一步地,所述双机械臂包括左肩关节、右肩关节、左肘关节、右肘关节、左五指灵巧手和右五指灵巧手,所述双机械臂通过所述左肩关节和所述右肩关节与所述躯干相连。
13.进一步地,所述头部模块还包括外壳支撑件,所述外壳支撑件安装在所述中心板上。
14.进一步地,所述头部模块还包括外壳,所述外壳包括前部外壳和后部外壳,所述前部外壳与所述外壳支撑件和所述中心板相连,所述后部外壳与所述前部外壳连接安装。
15.本发明还涉及一种操作仿人双臂机器人的拟人协作路径规划方法,其特征在于,所述方法包括以下步骤:
16.步骤1、采集日常活动中人体双臂协作的运动轨迹数据集;
17.步骤2、通过对所述运动轨迹数据集的聚类分析,规划出不同操作任务对应的自然平滑的拟人协作路径模型;
18.步骤3、通过双目立体视觉组件的两个仿人眼采集环境及目标物的图像信息并计算三维几何信息,并实时跟踪左五指灵巧手和右五指灵巧手的空间位姿,建立手眼关系模型;
19.步骤4、根据所述手眼关系模型确认机械臂手部的起始点和操作任务的终点,通过匹配所述拟人协作路径模型,预测最优的拟人协作路径,所述最优的拟人协作路径是根据所述目标物的几何属性与空间位置,同时对多个抓取手势和机械臂的运动轨迹进行联合规划,在线选择的机械臂的轨迹和抓取手势。
20.在本发明的较佳实施方式中,通过仿人双臂机器人本体和双臂机器人拟人协作路
径规划方法实现;所述仿人双臂机器人本体包括头部模块、双机械臂和躯干;头部模块由双目立体视觉组件、两自由度颈部、外壳连接结构、中心板和外壳组成;双机械臂包括左肩关节、右肩关节、左肘关节、右肘关节、左五指灵巧手和右五指灵巧手。
21.双目立体视觉组件由二种直线电机、二种安装板和对应的固定板、二种连杆、一个电机连接件、一个异形连杆、二种小连杆、眼球、眼眶和眼眶支架组成;将二个第一直线电机安装在第一安装板上,由第一固定板固定;电机连接件连接第一电机轴和第一连杆,第一连杆连接眼球的第一连杆安装孔,将眼球安装在眼眶上,再将眼眶安装在眼眶支架上,眼眶支架安装在中心板上,由第一直线电机驱动单个眼球的左右运动,同时控制两个第一直线电机,实现眼球同步运动。
22.双目立体视觉组件的第二直线电机固定在第二安装板上,由第二固定板固定在中心板上,电机连接件安装在第二电机轴和异形连杆上,异形连杆安装在第一安装板上,使眼睛运动结构形成整体,由第二直线电机驱动眼眶做仰俯运动。
23.两自由度颈部由单轴舵机、单轴舵机座、双轴舵机座、双轴舵机、双轴轴盘连接件、舵机中心板连接件、中心板组成;单轴舵机安装在单轴舵机座上,双轴舵机座安装在单轴轴盘上,双轴舵机安装在双轴舵机座上,双轴舵机通过连接双轴轴盘连接件、舵机中心板连接件和中心板相连;单轴舵机驱动中心板做往复圆周运动,双轴舵机驱动中心板做头部俯仰运动。
24.双目立体视觉组件包括两个仿人眼,用于采集环境及目标物的图像信息并计算三维几何信息;双目立体视觉组件实时跟踪左五指灵巧手和右五指灵巧手的空间位姿,建立手眼关系模型。双臂机器人的拟人协作路径规划方法,是利用人双臂对同类任务的运动轨迹具有相似性,根据操作任务,采集日常活动中人体双臂协作的运动轨迹数据集,进一步通过对运动轨迹的聚类分析,规划出不同操作任务对应的自然平滑的拟人协作路径模型。
25.双臂机器人的拟人协作路径规划方法可以根据机械臂手部的起始点和操作任务的终点,通过匹配所述拟人协作路径模型,预测最优的拟人协作路径。最优的拟人协作路径是根据目标物的几何属性与空间位置,同时对多个抓取手势和机械臂的运动轨迹进行联合规划,在线选择的机械臂的轨迹和抓取手势。
26.与现有技术相比,本发明带来的有益效果是:
27.1、仿人双臂机器人头部采用双目视觉组件并配置两自由度颈部,结构更像人类的双眼和颈部,更容易确定物体的三维轮廓并实时调整视野,进而确保双臂动作更加精准;
28.2、兼顾了双臂协作机器人的协作路径自主化和拟人化,拓展了在教育、陪护、助老助残等场景应用潜力。
29.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
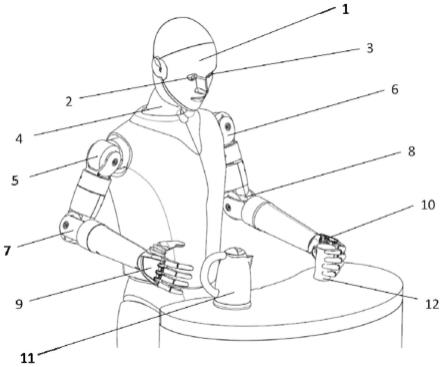
30.图1是本发明的一个较佳实施例的一种仿人双臂机器人的结构示意图;
31.图2是本发明的一个较佳实施例的一种仿人双臂机器人的头部结构示意图;
32.图3是本发明的一个较佳实施例的一种仿人双臂机器人的两自由度颈部结构示意图;
33.图4是本发明的一个较佳实施例的一种仿人双臂机器人的双目立体视觉组件的第一驱动结构示意图;
34.图5是本发明的一个较佳实施例的一种仿人双臂机器人的双目立体视觉组件的第二驱动结构示意图;
35.图6是本发明的一个较佳实施例的一种仿人双臂机器人的头部模块主体支撑结构示意图;
36.图7是本发明的一个较佳实施例的一种仿人双臂机器人的头部模块前部外壳结构示意图;
37.图8是本发明的一个较佳实施例的一种仿人双臂机器人的拟人协作路径规划方法框图;
38.其中,1-头部模块,2-机器人右眼,3-机器人左眼;4-两自由度颈部;5-右肩关节;6-左肩关节;7-右肘关节,8-左肘关节,9-右五指灵巧手,10-左五指灵巧手,11-水壶,12-水杯,13-颈部运动组件,14-眼部运动组件,15-外壳连接结构,16-中心板,161-舵机中心板连接件固定孔,162-外壳固定孔,163-第二安装板固定孔,164-外壳支撑件固定孔,165-眼眶支架固定孔,17-单轴舵机座,171-单轴舵机固定孔,18-双轴舵机座,181-双轴舵机固定孔,182-单轴轴盘连接孔,19-双轴舵机,191-双轴舵机连接孔,192-双轴轴盘,193-双轴轴盘连接件固定孔,20-舵机中心板连接件,201-中心板连接孔,202-双轴轴盘连接件连接孔,21-双轴轴盘连接件,211-舵机中心板连接件固定孔,212-双轴轴盘连接孔,22-单轴舵机,221-单轴舵机连接孔,222-单轴舵机轴盘连接孔,23-眼球,231-眼球中心连接孔,232-第一连杆安装孔,24-眼眶支架,241-眼眶安装孔,242-眼眶支架连接孔,25-第一直线电机连接件,251-连杆安装孔,252-电机连接孔,26-第一直线电机,261-电机轴,262-第一电机连接孔,27-第一固定板,271-第一固定板连接孔,272-第一电机固定孔,28-第一连杆,281-第一连杆连接孔,29-眼眶,291-眼眶支架连接孔,292-第一安装板连接孔,293-眼球安装孔,30-第一安装板,301-眼眶固定孔,302-第一固定板固定孔,303-第一固定板中间固定孔,304-异形连杆固定孔,31-异形连杆,311-第一安装板连接孔,312-第二连杆安装孔,32-第二直线电机,321-第二电机轴,33-第二连杆,331-第二连杆连接孔,250-第二直线电机连接件,34-第二安装板,341-第二安装板连接孔,35-外壳支撑件,351-外壳支撑件连接孔,352-外壳固定孔,36-第二固定板,361-第二固定板连接孔,37-前部外壳,371-外壳两侧连接孔,372-外壳连接孔,373-后部外壳固定孔。
具体实施方式
39.以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
40.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
41.如图1所示,本发明提供了一种仿人双臂机器人及其拟人协作路径规划方法,通过仿人双臂机器人本体和双臂机器人拟人协作路径规划方法实现。仿人双臂机器人本体包括
头部模块1、双机械臂和躯干。头部模块1由双目立体视觉组件、两自由度颈部4、外壳连接结构、中心板和外壳组成。双机械臂包括右肩关节5和左肩关节6、右肘关节7和左肘关节8、右五指灵巧手9和左五指灵巧手10。本实施例中,仿人双臂机器人需要完成的协作任务是右五指灵巧手9抓取水壶11向左五指灵巧手10中抓握的水杯12中倒水。
42.如图2所示,拆除外壳后,本仿人双臂机器人头部由颈部运动组件13、眼部运动组件14、外壳连接组件15和中心板16组成。如图3所示,颈部运动组件13安装:单轴舵机22通过单轴舵机连接孔221安装在单轴舵机座17的单轴舵机固定孔171上;双轴舵机座18通过单轴轴盘连接孔182安装在单轴舵机轴盘连接孔222上;双轴舵机19通过双轴舵机连接孔191安装在双轴舵机座18通过双轴舵机固定孔181上,使双轴舵机19和双轴舵机座18大面积接触;双轴轴盘连接件21通过双轴轴盘连接孔212安装在双轴轴盘192的双轴轴盘连接件固定孔193上;舵机中心板连接件20通过双轴轴盘连接件连接孔202安装在双轴轴盘连接件21的舵机中心板连接件固定孔211上;舵机中心板连接件20通过中心板连接孔201安装在中心板16两侧的舵机中心板连接件固定孔161上,颈部运动组件13和中心板16安装完成。
43.如图4和图5所示,眼部第一驱动结构安装:将第一直线电机26放在第一安装板30上,第一电机连接孔262和第一固定板固定孔302对齐,第一固定板27通过第一固定板连接孔271安装在第一安装板30的第一固定板中间固定孔303上,第一电机固定孔272安装在第一安装板30的第一固定板固定孔302上,对侧第一直线电机26安装方式相同,第一直线电机连接件25通过电机连接孔252安装在第一直线电机26的电机轴261上;第一连杆28通过第一连杆连接孔281分别安装在第一直线电机连接件25的连杆安装孔251上和眼球23的第一连杆安装孔232上;眼球23通过眼球中心连接孔231安装在眼眶29的眼球安装孔293上,另一只眼球安装方式相同;眼眶29通过第一安装板连接孔292安装在第一安装板30的眼眶固定孔301上;眼眶支架24通过眼眶安装孔241安装在眼眶支架连接孔291上;眼眶支架24通过眼眶支架连接孔242安装在中心板16的眼眶支架固定孔165上。
44.如图5所示,眼部第二驱动驱动安装:第二直线电机连接件250通过第二直线电机连接件250的连接孔安装在第二直线电机32的第二电机轴321上,第二连杆33通过第二连杆连接孔331安装在第二直线电机连接件250的连杆安装孔上和异形连杆31的第二连杆安装孔312上;异形连杆31通过第一安装板连接孔311安装在第一安装板30的异形连杆固定孔304上。
45.如图6所示,第二安装板34与第二直线电机32通过结构特点紧固,第二安装板34通过第二安装板连接孔341安装在中心板16一侧的第二安装板固定孔163上,第二固定板36通过第二固定板连接孔361安装在中心板16对侧的第二安装板固定孔163上;外壳支撑件35通过外壳支撑件连接孔351安装在中心板16的外壳支撑件固定孔164上。如图7所示,将各部件组装完成,前部外壳37通过外壳两侧连接孔371固定在外壳支撑件35的外壳固定孔352上,前部外壳37通过外壳连接孔372安装在中心板16的外壳固定孔162上;后部外壳通过后部外壳固定孔373与前部外壳37安装。
46.如图8所示,双臂机器人拟人协作路径规划方法,是利用人双臂对同类任务的运动轨迹具有相似性,根据操作任务,采集日常活动中人体双臂协作的运动轨迹数据集,进一步通过对运动轨迹的聚类分析,规划出不同操作任务对应的自然平滑的拟人协作路径模型。双目立体视觉组件的两个仿人眼采集环境及目标物的图像信息并计算三维几何信息,并实
时跟踪左右五指灵巧手的空间位姿,建立手眼关系模型。双臂机器人拟人协作路径规划方法,可根据机械臂手部的起始点和操作任务的终点,通过匹配所述拟人协作路径模型,预测最优的拟人协作路径。最优的拟人协作路径,可以根据目标物的几何属性与空间位置,同时对多个抓取手势和机械臂的运动轨迹进行联合规划,在线选择机械臂的轨迹和抓取手势。
47.与现有技术相比,本发明带来的有益效果是:仿人双臂机器人头部采用双目视觉组件并配置两自由度颈部,结构更像人类的双眼和颈部,更容易确定物体的三维轮廓并实时调整视野,进而确保双臂动作更加精准;兼顾了双臂协作机器人的协作路径自主化和拟人化,拓展了在教育、陪护、助老助残等场景应用潜力。
48.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1