物料移动方法、装置、控制器、机器人和控制系统与流程
本技术涉及机器人控制,具体而言,涉及一种物料移动方法、装置、控制器、机器人和控制系统。
背景技术:
1、在各工厂中,生产的物料在不同位置的切换通常需要机器人对物料进行移动,不可避免的是物料所处的环境中可能存在一些障碍物,因此,可以在物料移动的过程中发生碰撞。目前的做法是,通过图像识别等方式识别移动路线上的障碍物,以避开障碍物。但是不可避免的还是存在一些不可避免的碰撞,从而影响物料移动的效率和安全。
技术实现思路
1、有鉴于此,本技术实施例的目的在于提供一种物料移动方法、装置、控制器、机器人和控制系统,以改善现有技术中物料移动的效率和安全不足的问题。
2、第一方面,本技术实施例提供了一种物料移动方法,包括:
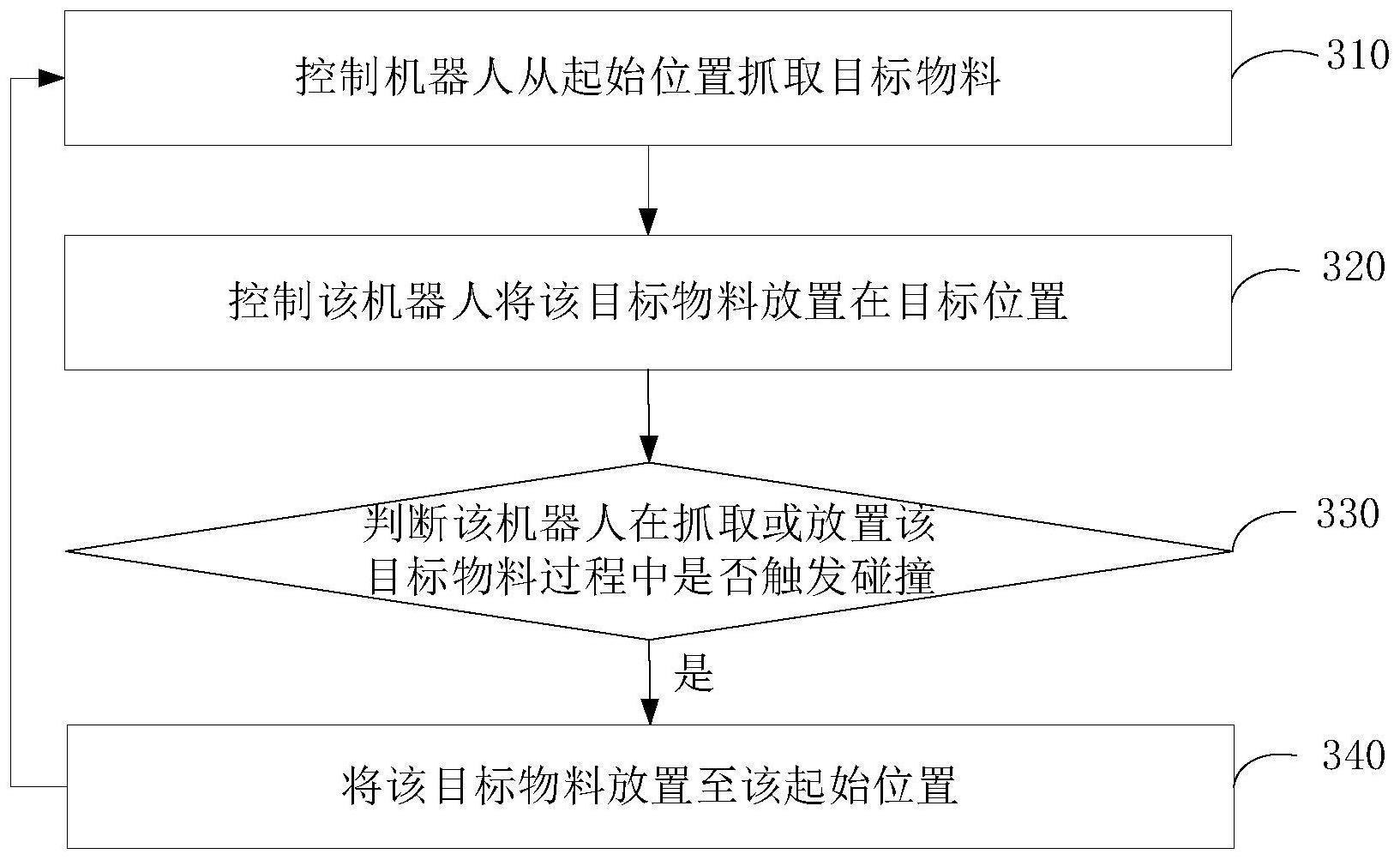
3、控制机器人从起始位置抓取目标物料;
4、控制所述机器人将所述目标物料放置在目标位置;
5、判断所述机器人在抓取或放置所述目标物料过程中是否触发碰撞;
6、若所述机器人发生了碰撞,将所述目标物料放置至所述起始位置,以重新执行所述目标物料的移动。
7、在一可选的实施方式中,所述判断所述机器人在抓取或放置所述目标物料过程中是否触发碰撞,包括:
8、判断所述机器人在抓取所述目标物料或放置所述目标物料过程中的扭矩是否在扭矩阈值区间内;
9、若所述机器人在抓取所述目标物料或放置所述目标物料过程中的扭矩未在扭矩阈值区间内,则确定所述机器人发生了碰撞。
10、在上述实施方式中,可以通过对机器人的扭矩进行监控,确定出机器人在移动物料的过程中是否存在由于障碍物所导致扭矩变大,从而确定出是否发生了碰撞。在使用较小的计算量的情况下,可以确定出碰撞或者可能发生的碰撞。
11、在一可选的实施方式中,所述扭矩阈值区间包括第一扭矩阈值区间和第二扭矩阈值区间;
12、所述判断所述机器人在抓取所述目标物料或放置所述目标物料过程中的扭矩是否在扭矩阈值区间内,包括:判断所述机器人在抓取到所述目标物料之前所述机器人的扭矩是否在所述第一扭矩阈值区间内;或者,判断所述机器人在抓持住所述目标物料过程中所述机器人的扭矩是否在第二扭矩阈值区间内,所述第一扭矩阈值区间的上限值大于所述第二扭矩阈值区间的上限值;若所述机器人在抓取到所述目标物料之前所述机器人的扭矩未在所述第一扭矩阈值区间内,则确定所述机器人发生了碰撞;若所述机器人在抓持住所述目标物料过程中的扭矩未在第二扭矩阈值区间内,则确定所述机器人发生了碰撞。
13、在上述实施方式中,在不同阶段可以使用不同的扭矩限幅,考虑在抓取物料之前是空夹持件,扭矩限幅是为了保护夹持件及对应的物料抓取位的机构;而放料位的扭矩限幅是为了保护抓取的物料不受损伤,而夹持件机构发生物理形变等损伤需要的外力是大于物料产生损伤的力的,因此,设置第一扭矩阈值区间和第二扭矩阈值区间不同的扭矩限幅可以更好地保护夹持件和物料。
14、在一可选的实施方式中,所述判断所述机器人在抓取到所述目标物料之前所述机器人的扭矩是否在所述第一扭矩阈值区间内,包括:判断所述机器人在抓取到所述目标物料之前,且处于所述起始位置限定区域内,所述机器人的扭矩是否在所述第一扭矩阈值区间内。
15、在上述实施方式中,可以仅在可能存在碰撞的限定区域使用该第一扭矩阈值区间进行扭矩限幅度,这样可以在该限定区域内提高机器人的安全性,以及夹取的物料的安全性。在离开该起始位置限定区域可以不使用该第一扭矩阈值区间对机器人的工作进行限定,可以提高机器人工作的效率。
16、在一可选的实施方式中,所述判断所述机器人在抓持住所述目标物料过程中所述机器人的扭矩是否在第二扭矩阈值区间内,包括:判断所述机器人在抓持住所述目标物料过程,且处于所述目标位置限定区域内,所述机器人的扭矩是否在第二扭矩阈值区间内。
17、在上述实施方式中,可以仅在可能存在碰撞的限定区域使用该第二扭矩阈值区间进行扭矩限幅度,这样可以在该限定区域内提高机器人的安全性,以及夹取的物料的安全性。在还未进入该目标位置限定区域可以不使用该第二扭矩阈值区间对机器人的工作进行限定,可以提高机器人工作的效率。
18、在一可选的实施方式中,所述判断所述机器人在抓取或放置所述目标物料过程中是否触发碰撞,包括:判断所述机器人在抓取或放置所述目标物料过程中,所述机器人的夹持件是否在所述夹持件的导向上发生挤压;
19、若所述机器人的夹持件在所述夹持件的导向上发生挤压,则确定所述机器人发生了碰撞。
20、在上述实施方式中,还可以通过机器人的夹持件的位置变化所导致的挤压确定是否发生了碰撞,其能够直接且简单的结构实现碰撞识别,降低碰撞识别所需的硬件资源。
21、在一可选的实施方式中,所述机器人的夹持件的导向末端设置碰撞检测机构;
22、所述判断所述机器人在抓取或放置所述目标物料过程中,所述机器人的夹持件是否在所述夹持件的导向上发生挤压,包括:
23、通过所述碰撞检测机构,判断所述机器人在抓取或放置所述目标物料过程中,所述机器人的夹持件是否在所述夹持件的导向上发生挤压。
24、在上述实施方式中,通过在夹持件的导向末端设置碰撞检测机构,可以通过碰撞检测机构的状态确定出夹持件的导向上是否发生挤压,可以通过该碰撞检测机构的状态直观且简单地呈现,降低碰撞检测的难度。
25、在一可选的实施方式中,所述控制机器人从起始位置抓取目标物料,包括:采用直线控制命令,控制所述机器人采用直线运动的方式从起始位置抓取目标物料;
26、所述控制所述机器人将所述目标物料放置在目标位置,包括:采用直线控制命令,控制所述机器人采用直线运动的方式将所述目标物料放置在目标位置。
27、在上述实施方式中,机器人可以采用直线运动的方式运动,可以使碰撞发生时,受到的冲击力方向是相对统一的,从而可以使碰撞检测机构更有效地更灵敏地检测到碰撞。进一步地,也就能够提高机器人作业的安全性。
28、在一可选的实施方式中,所述方法还包括:在确定所述机器人发生了碰撞后,记录所述机器人在移动所述目标物料所导致的碰撞次数;在所述碰撞次数超过碰撞阈值时,将所述目标物料放置至所述起始位置,对所述目标物料进行定位操作,基于所述定位操作重新执行所述目标物料的移动。
29、在上述实施方式中,再多次发生碰撞多次撤回重新移动后,可以重新对物料进行定位,以提高物料移动的准确性。
30、在一可选的实施方式中,所述方法还包括:在确定所述机器人发生了碰撞后,确定所述目标物料与所述机器人的夹持件是否发生相对位置变化;若所述目标物料与所述机器人的夹持件发生了相对位置变化,将所述目标物料放置至所述起始位置,对所述目标物料进行定位操作,基于所述定位操作重新执行所述目标物料的移动。
31、在上述实施方式中,还可以确定夹持件与物料是否发生了相对位置变化,如果发生了相对位置变化,再对物料进行重定位,可以提高物料移动的准确性。
32、在一可选的实施方式中,所述确定所述目标物料与所述机器人的夹持件是否发生相对位置变化,包括:
33、根据所述机器人当前的夹持方式以及所述目标物料的产品状态,确定出定所述目标物料与所述机器人的夹持件是否发生相对位置变化。
34、在一可选的实施方式中,所述根据所述机器人当前的夹持方式以及所述目标物料的产品状态,确定出定所述目标物料与所述机器人的夹持件是否发生相对位置变化,包括:
35、若所述机器人当前的夹持方式为仅底部托起的方式,则确定目标物料与所述机器人的夹持件发生了相对位置变化;
36、若所述机器人当前的夹持方式为仅侧边夹持的方式,所述目标物料的产品状态为裸电芯状态或带顶盖电芯状态,则确定目标物料与所述机器人的夹持件发生了相对位置变化;
37、若所述机器人当前的夹持方式为侧边夹持且底部托起的方式,所述目标物料的产品状态为裸电芯状态,则确定目标物料与所述机器人的夹持件发生了相对位置变化。
38、在上述实施方式中,考虑不同的夹持方式以及物料处于不同阶段可能会在碰撞后呈现的状态,则可以基于夹持方式以及物料处于不同阶段确定出夹持件与物料是否发生相对位置变化,以在准确移动的基础上,还能够降低资源的浪费。
39、第二方面,本技术实施例提供了一种物料移动装置,包括:
40、第一控制模块,用于控制机器人从起始位置抓取目标物料;
41、第二控制模块,用于控制所述机器人将所述目标物料放置在目标位置;
42、判断模块,用于判断所述机器人在抓取或放置所述目标物料过程中是否触发碰撞;
43、若所述机器人发生了碰撞,将所述目标物料放置至所述起始位置,以重新执行所述第一控制模块和所述第二控制模块。
44、第三方面,本技术实施例提供了一种控制器,包括:处理单元、存储单元,所述存储单元存储有所述处理器可执行的机器可读指令,当控制器运行时,所述机器可读指令被所述处理单元执行时执行如上述的方法的步骤。
45、第四方面,本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的方法的步骤。
46、第五方面,本技术实施例提供了一种机器人,包括:上述的控制器。
47、第六方面,本技术实施例提供了一种控制系统,包括:机器人和上述的控制器;所述控制器用于控制所述机器人执行抓取或放置所述目标物料的动作。
48、本技术实施例提供的物料移动方法、装置、控制器、机器人和控制系统,结合碰撞识别,在碰撞存在时,可以直接将所述目标物料放置至所述起始位置,以重新执行所述目标物料的移动,以保持物料的及时准确地移动。进一步地,由于无需认为介入可以降低资源的消耗,提高机器人移动物料的效率。
49、为使本技术的上述目的、特征和优点能更明显易懂,下文特举实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!