一种基于视触觉传感器的操作物受力估计方法
本发明涉及机器人受力检测领域,特别是涉及一种基于视触觉传感器的操作物受力估计方法。
背景技术:
1、随着科学技术的不断进步,机器人在实际生活中的运用也愈加广泛,但随之而来的安全问题也受到了越来越多人的关注。在执行不同的操作任务时,机器人需要对不同的物体的进行操作,当在执行操作物过程中如果操作物与其他物体碰撞或者受力堵转,不但容易导致机械人或物体损坏,甚至会对人身安全造成危害。因此,在人机协同操作、机器人非结构化环境操作、精密安装等诸多任务中,如何使机器人具备对其操作物的受力感知能力都是一个不可避免的难题。
2、使机器人具备力感知能力的方法主要包括有:传统的力-力矩传感器、触觉传感器两大类。对于传统力和力矩传感器大多能够较为精细地检测单点或者单关节的受到力和力矩信息,体积较大,常安装于机械臂关节或末端法兰处,虽然可以直接获取力和力矩信号,但由于无法安装再夹爪末端,如果需要获取操作物的受力情况则需要已知机械臂的具体物理参数再利用动力学方法计算才能获取。如果物理参数模型不够准确则计算得到力和力矩信号容易包含较大的误差。
技术实现思路
1、本发明的目的在于解决如何提高机器人对其操作物受力估计精确性的问题,提出一种基于视触觉传感器的操作物受力估计方法。
2、本发明的技术问题通过以下的技术方案予以解决:
3、一种基于视触觉传感器的操作物受力估计方法,包括以下步骤:
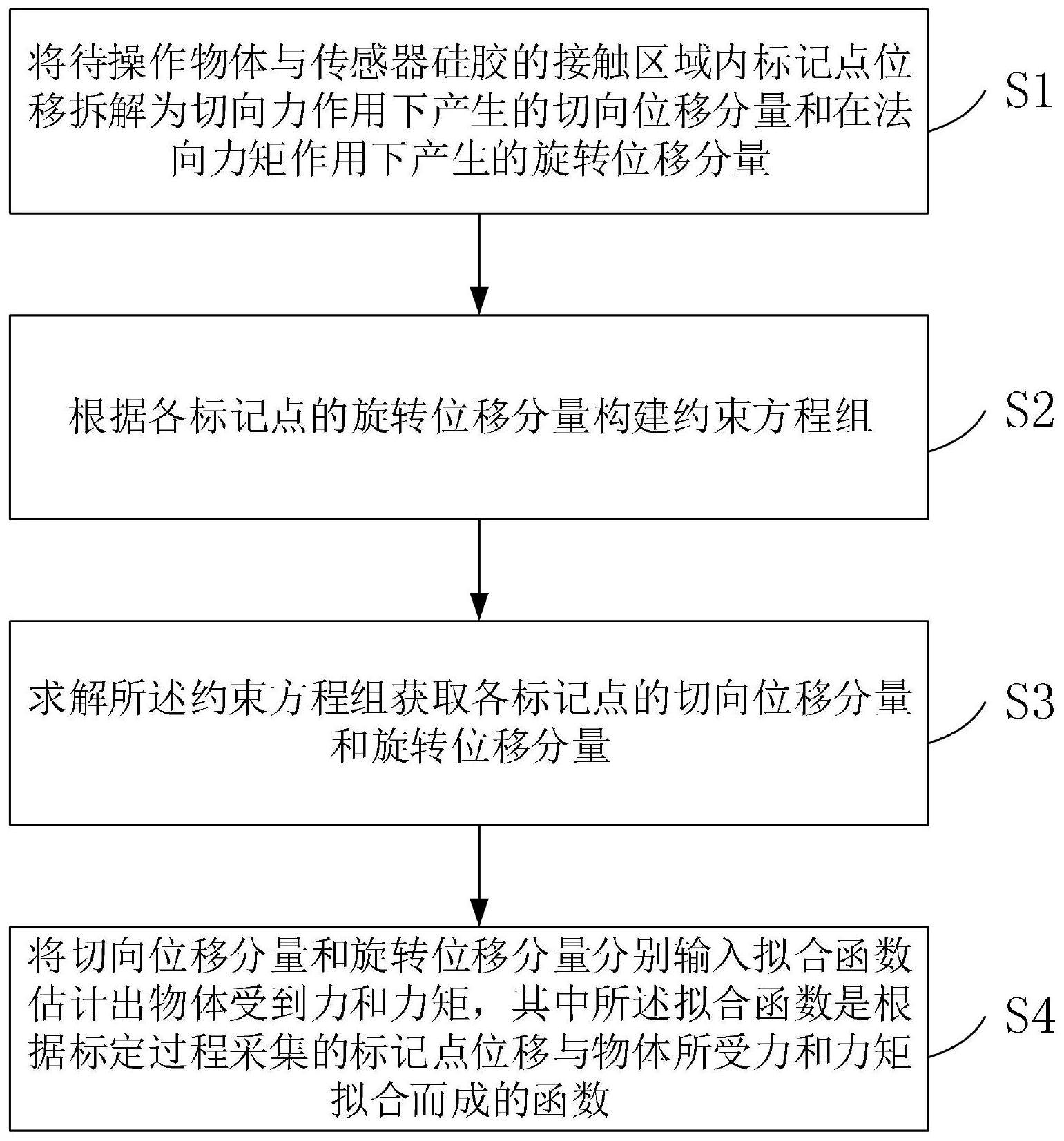
4、s1、将待操作物体与传感器硅胶的接触区域内标记点位移拆解为切向力作用下产生的切向位移分量和在法向力矩作用下产生的旋转位移分量;
5、s2、根据各标记点的旋转位移分量构建约束方程组;
6、s3、求解所述约束方程组获取各标记点的切向位移分量和旋转位移分量;
7、s4、将切向位移分量和旋转位移分量分别输入拟合函数估计出物体受到力和力矩,其中所述拟合函数是根据标定过程采集的标记点位移与物体所受力和力矩拟合而成的函数。
8、在一些实施例中,步骤s4中所述函数关系通过采集标定数据的方法来拟合,包括以下步骤:
9、a1、控制机械臂先使视触觉传感器与操作物样例接触,保持视触觉传感器与操作物在竖直方向上的恒力接触;
10、a2、控制机械臂水平运动或转动,使硅胶膜产生形变,求解根据各标记点的旋转位移分量构建的约束方程组,提取出标记点位移的水平位移和旋转角度正切值tanθ,同时记录此时旋转矩阵读取的切向力和法向力矩t;
11、a3、通过采用采集到的多组数据,拟合到tanθ到t的函数。
12、在一些实施例中,步骤s2中所述构建约束方程组包括:
13、以各标记点的旋转位移分量垂直与其到旋转中心的连线构建第一约束方程组;
14、以各标记点到旋转中心的距离在旋转前后保持不变构建第二约束方程组。
15、在一些实施例中,所述构建第一约束方程组包括:
16、所有接触区域中的任取两点标记点获得以下表达式:
17、(xmi-xmj)xf+(xdi-xdj)xc+(ymi-ymj)yf+(ydi-ydj)yc=xmi*xdi+ymi*ydi+xmj*xdj+ymj*ydj(i≠j)
18、其中pmi=(xmi,ymi)表示当前标记点的相机坐标系坐标,pc=(xc,yc)表示当前旋转中心的相机坐标系坐标,标记点的位移向量di的坐标形式为(xdi,ydi,);di中的水平位移分量df的坐标形式为(xf,yf),尾缀i和j表示对应标记点的相关变量。
19、在一些实施例中,所述构建第一约束方程组还包括:
20、假设共有n个标记点,能够获得个表达式,其矩阵形式表达式如下:
21、
22、其中pmi=(xmi,ymi)表示当前标记点的相机坐标系坐标,pc=(xc,yc)表示当前旋转中心的相机坐标系坐标,标记点的位移向量di的坐标形式为(xdi,ydi,);di中的水平位移分量df的坐标形式为(xf,yf),尾缀i和j表示对应标记点的相关变量。
23、在一些实施例中,所述构建第二约束方程组包括:
24、所有接触区域中的任取两点标记点获得以下表达式:
25、2(x′mi-x′mj)xf-2(xdi-xdj)xc+2(y′mi-y′mj)yf-2(ydi-ydj)yc=xdi(xmi+x′mi)+ydi(ymi+y′mi)+xdj(xmj+x′mj)+ydj(ymj+y′mj)(i≠j)
26、其中p'mi=(x'mi,y'mi)和pmi=(xmi,ymi)表示标记点运动前后的相机坐标系坐标,pc=(xc,yc)表示当前旋转中心的相机坐标系坐标,标记点的位移向量di的坐标形式为(xdi,ydi,);di中的水平位移分量df的坐标形式为(xf,yf),尾缀i和j表示对应标记点的相关变量。
27、在一些实施例中,所述构建第二约束方程组还包括:
28、假设共有n个标记点,能够获得个表达式,其矩阵形式表达式如下:
29、
30、其中pmi=(xmi,ymi)表示当前标记点的相机坐标系坐标,pc=(xc,yc)表示当前旋转中心的相机坐标系坐标,标记点的位移向量di的坐标形式为(xdi,ydi,);di中的水平位移分量df的坐标形式为(xf,yf),j为任意标记点。
31、在一些实施例中,步骤s3中所述求解约束方程组是通过最小二乘法求解,包括:利用最小二乘法求解y=ax,获得如下表达式:
32、x=(ata)-1aty
33、其中
34、
35、
36、最终能够求得由切向力引起的切向位移df=(xf,yf),旋转中心在图像中的坐标pc=(xc,yc)。
37、在一些实施例中,法向力矩的大小与旋转运动的幅度成正相关,旋转运动的幅度表达式为
38、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时能实现上述的基于视触觉传感器的操作物受力估计方法。
39、本发明具有如下有益效果:
40、本发明提出的一种基于视触觉传感器的操作物受力估计方法,通过设定合理的力学模型将硅胶所受外力拆解为切向力和法向力矩,将硅胶变形时的位移拆解为在切向力作用下产生的切向位移分量和在法向力矩作用下产生的旋转位移分量,搭建多组约束方程求解,能够实现切向力和法向力矩的同时估计,从而提高机器人对其操作物受力估计精确性。
41、在一些实施例中,本发明还有以下效果:
42、本发明借助接触区域相对静止的特点构建距离约束方程,回避了由于噪声导致的位移向量方向波动过大的问题,进一步提高估计结果的精确性。
43、本发明提出了一种标定方法,借助该方法可以实现传感器的快速标定,使传感器具备更好的泛用性。
44、本发明的其他有益效果将在具体实施方式上进一步阐述。
- 还没有人留言评论。精彩留言会获得点赞!