仿三带犰狳多瓣式蜷曲机器人
1.本发明属于仿生机器人技术领域,具体涉及仿三带犰狳多瓣式蜷曲机器人。
背景技术:
2.仿生机器人是指模仿生物、从事生物特点工作的机器人;巴西三带犰狳由于其独有的躯体构造,可以被用来作为野外信息探索开发机器人的仿生模型。
3.但是,现有三带犰狳仿生设计的重点一般在于研究犰狳外壳鳞片的几何排列模式和双层结构形式以及犰狳结构的鳞片在紧绷状态及放松状态下的结构特点上;主要集中在材料特性或部分结构上,缺少对其运动状态的分析、对其完整结构的应用,运用方向范围局限,缺乏对于犰狳细节的探索与挖掘,也未在犰狳本身结构上进行大胆创新。
技术实现要素:
4.针对现有技术中存在的上述问题,本发明的目的在于提供一种完整的三带犰狳运动模拟机器人,其结合三带犰狳的整体结构棚型, 实现多种仿生运动运动,适用于野外探索、益智娱乐、户外陪伴等各种场景。
5.本发明提供如下技术方案:仿三带犰狳多瓣式蜷曲机器人,包括支架、卷曲与伸展系统、填充增强系统、头尾末端闭合系统及四足运动系统;所述卷曲与伸展系统设置在支架上用于进行机器人躯体的卷曲与伸展;所述填充增强系统设置在卷曲与伸展系统上,用于对卷曲与伸展系统卷曲时进行结构填充;所述头尾末端闭合系统设置在卷曲与伸展系统上,使得卷曲与伸展系统卷曲时,机器人整体形成闭合结构以对其内部结构进行保护;所述四足运动系统设置在支架上,用于进行四足移动。
6.进一步的,所述卷曲与伸展系统包括甲壳系统及甲壳驱动组件;所述甲壳系统包括活动设置在支架前侧的前甲、活动设置在支架后侧的后甲及设置在前甲与后甲之间的中甲系统;所述前甲、后甲及中甲系统之间呈弧形排布并通过甲壳驱动组件实现联动运动。
7.进一步的,所述中甲系统包括活动设置在支架前侧的第一中甲、活动设置在支架后侧的第二中甲及位于第一中甲与第二中甲之间并固定设置在支架上的第三中甲;所述前甲与第二中甲之间、后甲与第一中甲之间通过甲壳驱动组件实现联动运动。
8.进一步的,所述甲壳驱动组件包括设置在支架上的安装座、设置在安装座上的甲壳驱动件及设置在甲壳驱动件输出端的滑块;所述滑块在甲壳驱动件的驱动下能够在安装座上进行滑动运动;所述甲壳驱动组件的数量为两组,一组甲壳驱动组件中的滑块通过连接件分别与前甲、第二中甲活动连接,形成联动机构;另一组甲壳驱动组件中的滑块通过连接件分别与后甲、第一中甲活动连接,形成联动机构。
9.进一步的,所述填充增强系统位于甲壳系统的外侧,其包括一组填充甲壳,所述填充甲壳用于在卷曲与伸展系统卷曲时,填充前甲与第一中甲之间、第一中甲与第三中甲之间、第三中甲与第二中甲之间及第二中甲与后甲之间的间隙;所述填充甲壳通过联动结构
与相邻的两个甲壳相连接。
10.进一步的,所述联动结构包括两个相对设置的连杆,两个连杆的一端传动连接,另一端分别与对应的甲壳活动连接。
11.进一步的,所述头尾末端闭合系统包括设置在前甲上的头部及设置在后甲上的尾部,所述头部及尾部分别通过对应的闭合驱动件驱动实现两者之间的旋转闭合。
12.进一步的,所述四足运动系统包括设置在支架两侧的四足行走机构及设置在支架中部的滚轮机构;所述四足行走机构包括支撑足,所述支撑足通过两个行走驱动件实现前后及左右方向上的旋转运动;所述滚轮机构包括设置在支架上的升降机构及设置在升降机构上的一组滚轮,滚轮通过对应的滚轮驱动件进行驱动。
13.进一步的,所述前甲、后甲、第一中甲、第二中甲、第三中甲填充甲壳外部的两侧均设有凸起,所述凸起上均各甲壳的中部均贴附有垫层。
14.通过采用上述技术,与现有技术相比,本发明的有益效果如下:1)本发明仿生机器人能够实现卷曲、伸展及四足行走等运动,适用于野外探索、益智娱乐、户外陪伴等场景;实现了新型球体展开与闭合、空余球面填充、球体机器驱动方式等功能;2)本发明中,通过设置的卷曲与伸展系统及填充增强系统,能够对三带犰狳的鳞片结构进行运动仿生,通过两个系统之间的联动配合,能够实现外侧壳体的卷曲与伸展;3)本发明中,通过设置的头尾末端闭合系统,与卷曲与伸展系统及填充增强系统相配合,使得仿生机器人卷曲时能够形成一个“封闭”的球形结构,对机器人内部的结构进行保护;4)本发明中,通过设置的四足运动系统,使得机器人能够进行移动行走,并能够避让障碍物,实现机器人的水平移动。
附图说明
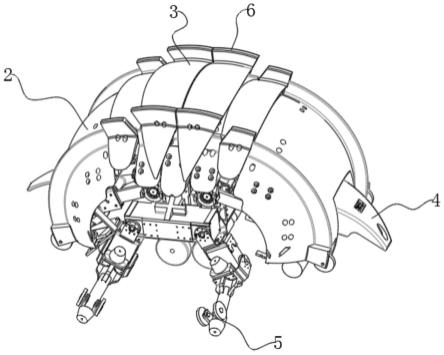
15.图1为本发明机器人伸展时的结构示意图;图2为本发明机器人卷曲时的结构示意图;图3为本发明卷曲与伸展系统的结构示意图;图4为本发明卷曲与伸展系统的内部结构示意图;图5为本发明甲壳驱动组件的结构示意图;图6为本发明填充增强系统的局部结构示意图;图7为本发明头尾末端闭合系统的安装结构示意图;图8为本发明头尾末端闭合系统中头部的结构示意图;图9为本发明头尾末端闭合系统中尾部的结构示意图;图10为本发明四足运动系统的结构示意图。
具体实施方式
16.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合说明书附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
17.相反,本发明涵盖任何由权利要求定义的在本发明的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本发明有更好的了解,在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。
18.请参阅图1-10,仿三带犰狳多瓣式蜷曲机器人,包括支架1、卷曲与伸展系统2、填充增强系统3、头尾末端闭合系统4及四足运动系统5;卷曲与伸展系统2及四足运动系统5均设置在支架1上;填充增强系统3及头尾末端闭合系统4均设置在卷曲与伸展系统2上。
19.具体的,卷曲与伸展系统2用于进行机器人躯体的卷曲与伸展,其包括前甲201、后甲202、三个中甲及甲壳驱动组件;前甲201、后甲202及三个中甲均为不完整的球面壳体结构,各壳体之间呈弧形排布形成类犰狳鳞片的结构。
20.其中,三个中甲设置在前甲201与后甲202之间,其包括第一中甲203、第二中甲204及第三中甲205;第一中甲203与前甲201通过一根转轴活动设置在支架1的前侧,第二中甲204与后甲202通过一根转轴活动设置在支架1的后侧。
21.其中,甲壳驱动组件包括安装座206、甲壳驱动件207及滑块208;安装座206固定设置在支架1上,甲壳驱动件207设置在安装座206上,其采用舵机,舵机的输出端连接丝杆,滑块208安装在丝杆上,滑块208随着舵机的旋转进行水平移动;甲壳驱动组件的数量为两组,一组甲壳驱动组件中的滑块208通过一组连接件分别与前甲201、第二中甲204活动连接形成联动运动副;另一组甲壳驱动组件中的滑块208通过一组连接件分别与后甲202、第一中甲203活动连接形成联动运动副。在两组甲壳驱动组件中舵机旋转运动的带动下,经由滑块208及一组连接件带动前甲201后甲202、第一中甲203及第二中甲204联动运动,实现躯体的卷曲及伸展。
22.具体的,填充增强系统3设置在甲壳系统的外侧,其包括四个填充甲壳301,四个填充甲壳301间隔分别设置在前甲201与第一中甲203之间、第一中甲203与第三中甲205之间、第三中甲205与第二中甲204之间及第二中甲204与后甲202之间;其中,填充甲壳301通过联动结构与相邻的两个甲壳相连接;联动结构包括连杆302,连杆302的一端设有啮齿;连杆302的数量为两个,两个连杆302的啮齿端相啮合进行传动,另一端分别与对应的甲壳活动连接,组合形成联动运动副,并能够保证填充甲壳301与其他甲壳之间联动运动的稳定性。
23.具体的,前甲201、后甲202、第一中甲203、第二中甲204、第三中甲205填充甲壳301外部的两侧均设有凸起,凸起上均各甲壳的中部均贴附有柔性的垫层6,以防止机器人移动时各甲壳与地面直接刚性接触。各个甲壳均包括壳体安装座及设置在壳体安装座的壳体,壳体通过螺钉紧固或者磁性吸附的方式固定在壳体安装座上。
24.具体的,头尾末端闭合系统4包括仿犰狳头部结构的头部401及仿犰狳尾部结构的尾部402,头部401设置在前甲201上,尾部402设置在后甲202上,两者均通过对应的闭合驱动件403驱动进行旋转,实现闭合。
25.具体的,四足运动系统5包括设置在支架1两侧的四足行走机构及设置在支架1中部的滚轮机构;四足行走机构包括支撑足501,支撑足501通过两个行走驱动件502实现前后及左右方向上的旋转运动;滚轮机构包括设置在支架1上的升降机构及设置在升降机构上的一组滚轮503,滚轮503通过对应的滚轮驱动件504进行旋转驱动,该滚轮采用橡胶轮。
26.基于四足运动系统5,在光滑地面上,机器人能够实现四个滚轮的单独驱动;在崎岖山地上,机器人能够实现四轮驱动配合四足辅助的运动与助力。
27.本实施例机器人能够实现如下运动:卷曲运动:机器人初始处于伸展状态,甲壳驱动件207启动,带动甲壳系统卷曲,并带动填充增强系统3联动卷曲;同时,四足运动系统5中,行走驱动件502启动,带动支撑足501旋转折叠;升降机构启动,带动滚轮机构收缩;且头尾末端闭合系统4中,闭合驱动件403带动头部401及尾部402旋转卷曲;直至卷曲与伸展系统2、填充增强系统3及头尾末端闭合系统4完成卷曲形成一个“闭合”的球形结构。
28.卷曲后滚动运动:当机器人整体卷曲形成一个“闭合”的球形结构后,四足运动系统5中的行走驱动件502启动,带动支撑足501旋转折叠,实现蜷曲后的四足蹬地滚动运动,能够进行坡面滚动;滚动结束后,四足运动系统5中,四个支撑足501蹬地定位,然后进行伸展运动。
29.伸展运动一:机器人初始处于“闭合”球形结构状态,卷曲与伸展系统2呈正向设置;伸展时,首先,带动支撑足501旋转对躯体进行支撑;然后,闭合驱动件403带动头部401及尾部402旋转打开,当头部401及尾部402与滚轮机构不干涉时,升降机构启动,带动滚轮机构向外移动;此时,头部401及尾部402继续旋转伸展,甲壳驱动件207启动带动甲壳系统及填充增强系统3伸展,直至两者展开并填充完全。
30.伸展运动二:机器人初始处于“闭合”球形结构状态,卷曲与伸展系统2呈反向设置;伸展时,首先,带动支撑足501反向旋转对躯体进行支撑,然后,闭合驱动件403带动头部401及尾部402旋转打开,当头部401及尾部402与滚轮机构不干涉时,升降机构启动,带动滚轮机构向外移动;此时,头部401及尾部402继续旋转伸展,甲壳驱动件207启动带动甲壳系统及填充增强系统3伸展,直至两者展开并填充完全。
31.行走运动:当机器人处于伸展状态时,两个行走驱动件502启动,对支撑足501进行前后及左右方向上的移动控制,并配合滚轮驱动件504的辅助驱动,能够实现机器人的水平移动。
32.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1