一种近场相对定位方法和装置与流程
1.本发明涉及设备相对定位领域,特别涉及一种近场相对定位方法和装置。
背景技术:
2.随着科学技术的发展进步,机器人的应用已经深入到各个领域。
3.现有机器人对接使用光学测距原理,对雨雪、雾霾、凝结水等环境的适应力不足,又受到光学最小测量距离的限制而导致机器人本体机械设计的困难,并且避免破坏机器人外表面的完整性。
4.因此,在厘米级的近场对接应用场景中期待一种近场相对定位方法和装置。
技术实现要素:
5.本发明解决的技术问题在于,提供了一种近场相对定位方法和装置,能够不破坏设备的外观完整性,并且环境适应性能强。
6.本发明解决其技术问题是采用以下的技术方案来实现的:
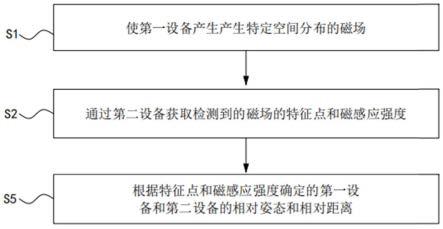
7.一种近场相对定位方法,包括:使第一设备产生产生特定空间分布的磁场;通过第二设备获取检测到的所述磁场的特征点和磁感应强度;根据所述特征点和所述磁感应强度确定所述的第一设备和第二设备的相对姿态和相对距离。
8.在本发明的较佳实施例中,上述使第一设备产生产生特定空间分布的磁场的步骤,包括:检测所述第一设备和所述第二设备之间的相对距离;在所述相对距离小于或等于预设距离时,使所述第一设备产生产生特定空间分布的磁场。
9.在本发明的较佳实施例中,上述第一设备上安装有磁场发生器;所述第二设备上安装有磁传感器。
10.在本发明的较佳实施例中,上述根据所述特征点和所述磁感应强度确定所述的第一设备和第二设备的相对姿态和相对距离的步骤之后,包括:根据所述第二设备接收到的磁感应信号强度变化,控制所述第二设备向所述第一设备移动。
11.在本发明的较佳实施例中,上述根据所述特征点和所述磁感应强度确定所述的第一设备和第二设备的相对姿态和相对距离的步骤之后,包括:根据所述第一设备和所述第二设备的相对姿态判断所述第一设备和所述第二设备是否能够进行对接。
12.一种近场相对定位装置,用于执行如上述中任意一项所述的近场相对定位方法,包括:第一设备和第二设备;所述第一设备上安装有至少一个磁场发生器,用于产生特定空间分布的磁场;所述第二设备上安装有磁传感器,用于获取检测到的所述磁场的特征点和磁感应强度。
13.在本发明的较佳实施例中,上述磁场发生器至少包括两个,安装在所述第一设备的中靠近对接面的一侧,且相邻的所述磁场发生器的磁极相反。
14.在本发明的较佳实施例中,上述磁场发生器设有用于与所述第一设备的电源模块连通的电源输入接口。
15.在本发明的较佳实施例中,上述磁传感器安装在所述第二设备中靠近对接面的一侧。
16.在本发明的较佳实施例中,上述磁传感器根据接收到的磁场强度确认所述第二设备与所述第一设备之间的相对距离,以及所述第二设备的姿态。
17.本发明采用上述技术方案达到的技术效果是:通过使第一设备产生产生特定空间分布的磁场;通过第二设备获取检测到的所述磁场的特征点和磁感应强度;根据所述特征点和所述磁感应强度确定所述的第一设备和第二设备的相对姿态和相对距离。通过上述方式,能够不破坏设备的外观完整性,并且环境适应性能强。
18.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明。
附图说明
19.图1为本发明示出的一种近场相对定位方法的流程图;
20.图2为本发明示出的一种近场相对定位装置的结构图。
具体实施方式
21.为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明的实施例保护的范围。通过具体实施方式的说明,当可对本发明为达成预定目的所采取的技术手段及功效得以更加深入且具体的了解,而且所附图式仅是提供参考与说明之用,并非用来对本发明加以限制。
22.请参考图1,图1为本发明示出的一种近场相对定位方法的流程图。
23.如图1所示,该实施例所述的近场相对定位方法,包括以下步骤:
24.s1:使第一设备产生产生特定空间分布的磁场;
25.s2:通过第二设备获取检测到的所述磁场的特征点和磁感应强度;
26.s3:根据所述特征点和所述磁感应强度确定所述的第一设备和第二设备的相对姿态和相对距离。
27.可选地,使第一设备产生产生特定空间分布的磁场的步骤,包括:检测所述第一设备和所述第二设备之间的相对距离;在所述相对距离小于或等于预设距离时,使所述第一设备产生产生特定空间分布的磁场。
28.可选地,第一设备上安装有磁场发生器;所述第二设备上安装有磁传感器。
29.可选地,根据所述特征点和所述磁感应强度确定所述的第一设备和第二设备的相对姿态和相对距离的步骤之后,包括:根据所述第二设备接收到的磁感应信号强度变化,控制所述第二设备向所述第一设备移动。
30.可选地,根据所述特征点和所述磁感应强度确定所述的第一设备和第二设备的相对姿态和相对距离的步骤之后,包括:根据所述第一设备和所述第二设备的相对姿态判断
所述第一设备和所述第二设备是否能够进行对接。
31.请参阅图2,图2为本发明示出的一种近场相对定位装置的结构图。
32.如图2所示,本发明还提供了一种近场相对定位装置,用于执行如上述中任意一项所述的近场相对定位方法,包括:第一设备和第二设备;所述第一设备上安装有至少一个磁场发生器,用于产生特定空间分布的磁场;所述第二设备上安装有磁传感器,用于获取检测到的所述磁场的特征点和磁感应强度。
33.可选地,磁场发生器至少包括两个,安装在所述第一设备的中靠近对接面的一侧,且相邻的所述磁场发生器的磁极相反。其中,相邻的磁场发生器之间等间距设置。
34.可选地,磁场发生器设有用于与所述第一设备的电源模块连通的电源输入接口。
35.可选地,磁传感器安装在所述第二设备中靠近对接面的一侧。
36.可选地,磁传感器根据接收到的磁场强度确认所述第二设备与所述第一设备之间的相对距离,以及所述第二设备的姿态。
37.本发明提供的的机器人相对定位方法和装置,通过使第一设备产生产生特定空间分布的磁场;通过第二设备获取检测到的所述磁场的特征点和磁感应强度;根据所述特征点和所述磁感应强度确定所述的第一设备和第二设备的相对姿态和相对距离。通过上述方式,能够不破坏设备的外观完整性,并且环境适应性能强。
38.应该理解的是,虽然附图的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,其可以以其他的顺序执行。而且,附图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,其执行顺序也不必然是依次进行,而是可以与其他步骤或者其他步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
39.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到本发明实施例可以通过硬件实现,也可以借助软件加必要的通用硬件平台的方式来实现。基于这样的理解,本发明实施例的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是cd-rom,u盘,移动硬盘等)中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或网络设备等)执行本发明实施例各个实施场景所述的方法。
40.以上结合附图详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,上述实施例及附图是示例性的,附图中的模块或流程并不一定是实施本发明实施例所必须的,不能理解为对本发明的限制,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型和组合,这些简单变型和组合均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1