火场救灾仿生蝎机器人
1.本发明属于仿生设备技术领域,具体涉及一种火场救灾仿生蝎机器人。
背景技术:
2.随着社会经济的迅猛发展,建筑和企业生产的特殊性。导致化学危险品和放射性物质泄露以及燃烧爆炸坍塌的事故隐患增加,事故发生的概率也相应提高。尤其是在石化、高层建筑、地铁隧道及地下建筑等地况复杂封闭的场合中发生火灾时,所造成的火灾危害也比较大。一旦发生爆炸事故,温度的上升速度比较快,而且烟的浓度也会迅速提升,对人员的安全有着很大的威胁,消防人员很难进入到现场进行救援。将消防机器人应用到消防工作中,有利于对火势进行控制,最大程度的减小伤亡同时减少火灾带来的损失。
3.消防机器人是特种机器人的一种,在消防灭火、抢险救援中愈加发挥举足轻重的作用。尤其随着各种大型石油化工企业、隧道、地铁等不断增多,油品燃气、毒气泄漏爆炸、隧道、地铁坍塌等灾害隐患不断增加。消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场,进行探测、反馈、处置作业,为及时有效的救援处置大大提高了效率,降低了人员伤亡风险。自2014年以来,中国消防机器人市场规模持续增长,到2018年增长至11.0亿元,同比增长54.93%;初步预计到2020年,我国消防机器人行业市场规模将达到18.2亿元,到2023年将增长至36.9亿元。
4.仿生机器人是指模仿生物、从事生物特点工作的机器人。目前,在西方国家,机械宠物十分流行,仿麻雀机器人可以担任环境监测的任务,具有广阔的开发前景。二十一世纪人类将进入老龄化社会,发展“仿人机器人”将弥补年轻劳动力的严重不足,解决老龄化社会的家庭服务和医疗等社会问题,并能开辟新的产业,创造新的就业机会。从国内外的研究现状来看,水下仿生机器人,空中仿生机器人,地面仿生机器人,仿人机器人,生物机器人等主要应用于探索方面,而用于消防方面的仿生机器人出现较少。
技术实现要素:
5.为了克服上述现有技术的缺点,本发明的目的在于提供一种火场救灾仿生蝎机器人,解决了现有技术中消防方面仿生机器人少,石化、高层建筑、地铁隧道及地下建筑等地况复杂封闭的场合中发生火灾时消防员无法进入救援的问题。
6.为了达到上述目的,本发明采用以下技术方案予以实现:火场救灾仿生蝎机器人,包括底盘和控制器,底盘两侧对称设有行走单元,底盘前端两侧对称设有钳部单元,底盘前端中央设有识别单元,底盘后端设有尾部执行单元,底盘的内部设有控制单元,行走单元、钳部单元、尾部执行单元均与控制单元连接,识别单元、控制单元、控制器三者之间无线连接,底盘的外壳顶部为平面。
7.优选的,所述行走单元包括第一电机,第一电机固定设于底盘上方,折弯连接件一端与第一电机的输出轴相连,折弯连接件另一端与第二电机的输出轴相连,一个连接件一侧穿过第二电机,另一侧固定连接于第三电机,另一个连接件一侧穿过第三电机,另一侧固
定连接于第二电机,两个连接件螺栓连接,二段足与第三电机的输出轴连接。
8.优选的,所述第一电机的输出轴向下;
9.所述第二电机的输出轴为水平输出轴,与第一电机的输出轴成90
°
;
10.所述二段足的非尖端与第三电机连接。
11.优选的,所述钳部单元包括第一舵机,第一舵机通过底盘预留的孔固定连接于底盘,第一舵机的输出盘与机械臂一侧相连,机械臂另一侧与第二舵机相连,第二舵机的输出盘与机械杆相连,机械杆上设有机械爪。
12.优选的,所述第一舵机的输出盘与机械臂一侧内外齿咬合,机械杆设有两个,两个机械杆相啮合。
13.优选的,所述尾部执行单元包括第四电机,第四电机固定连接于底盘的外壳上,一段尾一端连接第四电机的输出轴,一段尾另一端与二段尾相连接。
14.优选的,所述二段尾与一段尾内外齿连接,二段尾与一段尾之间为可调节夹角,二段尾设有中空孔,直径为30mm。
15.优选的,所述机械爪可替换为刀片。
16.优选的,所述行走单元设有六组,底盘前端与后端的四组行走单元与底盘中轴线夹角呈45
°
;底盘中部的两组行走单元与底盘中轴线夹角呈90
°
。
17.优选的,所述钳部单元与底盘中轴线前端夹角成22.5
°
。
18.与现有技术相比,本发明具有以下有益效果:火场救灾仿生蝎机器人行走单元的仿生节肢结构设计,使得火场救灾仿生蝎机器人能够左右前后旋转行动,且可调节行走高度,大大提高了机器人的通过性,钳部单元用于执行避障以及抓取动作功能,尾部执行单元便于连接消防水炮进行喷射消防试剂;识别单元能够识别火灾现场的状况,并将状况传给控制单元和控制器,操作人员通过控制器发送命令使得火场救灾仿生蝎机器人进一步做出动作。火场救灾仿生蝎机器人能够适应复杂的火场环境。
附图说明
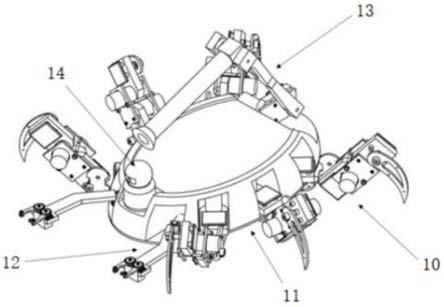
19.图1为本发明火场救灾仿生蝎机器人结构示意图;
20.图2为本发明的行走单元结构示意图;
21.图3为本发明的钳部单元结构示意图;
22.图4为本发明的尾部执行单元结构示意图;
23.其中:1、第一电机,2、第二电机;3、第三电机;4、二段足,5、第一舵机,6、第二舵机,7、机械臂;8、机械杆;9、机械爪;10、行走单元,11、底盘,12、钳部单元,13、尾部执行单元,14、识别单元,15、控制单元,16、控制器;21、折弯连接件;22,连接件,210、第四电机;211、一段尾;212、二段尾。
具体实施方式
24.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范
围。
25.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
26.火场救灾仿生蝎机器人,如图1所示,包括底盘11和控制器16,底盘11两侧对称设有行走单元10,底盘11前端两侧对称设有钳部单元12,底盘11前端中央设有识别单元14,底盘11后端设有尾部执行单元13,底盘11的内部设有控制单元15,行走单元10、钳部单元12、尾部执行单元13均与控制单元15连接,识别单元14、控制单元15、控制器16三者之间无线连接。
27.行走单元10设有六组,底盘11前端与后端的四组行走单元10与底盘11中轴线夹角呈45
°
;底盘11中部的两组行走单元10与底盘11中轴线夹角呈90
°
用于实现行走功能。
28.行走单元10包括第一电机1,如图2所示,第一电机1固定设于底盘11上方,折弯连接件21一端与第一电机1的输出轴相连,折弯连接件21另一端与第二电机2的输出轴相连,一个连接件22一侧穿过第二电机2,另一侧固定连接于第三电机3,另一个连接件22一侧穿过第三电机3,另一侧固定连接于第二电机2,两个连接件22螺栓连接,二段足4与第三电机3的输出轴连接。
29.第一电机1的输出轴向下,第一电机1的输出轴带动折弯件连接件21水平旋转。
30.第二电机2的输出轴为水平输出轴,与第一电机1的输出轴成90
°
,第二电机2用于带动整个行走单元10竖直旋转。第二电机2的驱动能够对火场救灾仿生蝎机器人高度位置进一步调节,第三电机3配合二段足4,使行走单元10在竖直方向上的高度调节具有更高的自由度。行走单元10,仿照蝎子的足部设计,在行走单元10上形成了三处关节,三处关节均通过电机驱动,保证火场救灾仿生蝎机器人能够正常行走。同时,两段足的设计给予了火场救灾仿生蝎机器人更多的可调节高度,提高火场救灾仿生蝎机器人的通过性,以适用于不同的地形环境要求。
31.二段足4的非尖端与第三电机3连接,在第三电机3驱动下在竖直面旋转。
32.行走单元10采用三个电机控制,能够实现单个足的抬起和伸展;二段足4采用尖端设计,通过性强,同时由于每个足的独立控制,能够实现火场救灾仿生蝎机器人多种角度的工作,同时运动方面,能够实现横向行走和旋转。
33.底盘11的外壳顶部为平面,便于放置消防救援的物品。
34.钳部单元12与底盘11中轴线前端夹角成22.5
°
,且对称布置于底盘11轴线两侧,用于执行避障以及抓取动作功能。
35.钳部单元12包括第一舵机5,如图3所示,第一舵机5通过底盘11的孔固定连接于底盘11,第一舵机5的输出盘与机械臂7一侧相连,机械臂7另一侧与第二舵机6相连,第二舵机6的输出盘与机械杆8相连,机械杆8上设有机械爪9。
36.第一舵机5的输出盘与机械臂7一侧内外齿咬合。
37.机械杆8设有两个,两个机械杆8相啮合,第二舵机6的输出盘旋转实现两个机械杆8上的机械爪9同步张开和闭合,实现抓取动作;机械爪9角度可调,方便抓取不同物体,且在抓取物体时更为牢靠。
38.第一舵机5旋转带动机械臂7进而机械臂7带动第二舵机6水平旋转,机械杆8随之水平旋转。
39.第一舵机5驱动钳部单元12旋转,以便于调整机械爪9至最佳的抓取角度,在机械爪9抵达需抓取部位时,第二舵机6驱动机械杆8和机械爪9进行抓取动作,并且通过手动调节机械爪9角度,控制钳部单元12抓取物的大小。
40.底盘11两侧设有四个孔,第一舵机5通过底盘11的四个孔固定连接输出盘。
41.尾部执行单元13设于底盘11的外壳中轴线后端,通过连接消防水炮,用于实现消防试剂的喷射。
42.尾部执行单元13包括第四电机210,如图4所示,第四电机210固定连接于底盘11的外壳上,一段尾211一端连接于第四电机210的输出轴,一段尾211另一端与二段尾212相连接。
43.二段尾212与一段尾211内外齿连接,二段尾212与一段尾211之间为可调节夹角,二段尾212设有中空孔,直径为30mm,便于连接消防水炮进行喷射消防试剂。
44.第四电机210的输出轴为水平输出轴。第四电机210带动尾部执行单元13竖直旋转。
45.识别单元14包括摄像头、红外传感器、麦克风、扬声器和wifi模块。
46.摄像头固定连接于底盘11的外壳中轴线前端,内部放置两个互相垂直的电机,实现摄像头的水平和竖直方向旋转。
47.识别单元14通过网络连接的方式向外界传输图像,通过摄像头的旋转功能,更快捷的了解周围的情况,摄像头集成了红外传感器,在光线较差的环境中仍能稳定可靠的传输图像,同时摄像头集成了麦克风和扬声器,在火场中发现受困者时可以与其进行交流,为救援工作的进行提供帮助。
48.控制单元15,包含舵机控制板、信号接收器,控制单元15放置于底盘11的外壳内部,接受外界遥控信号,控制火场救灾仿生蝎机器人做出对应动作。
49.控制器16,通过识别单元14传输出的图像进行发送信号,与控制单元15配合,实时对机器人环境进行判断后进行运动。
50.实施例
51.火场救灾仿生蝎机器人,相较于传统的轮式或履带式行走方式,六组足部单元配合行走通过性更强。底盘11上覆盖外壳,外壳覆盖保护电池和控制单元15,在外壳上端中轴线前部放置识别单元14,通过识别单元14的摄像头和红外传感器,保证各种环境下图像的清晰,通过wifi模块与外界进行图像传输和信息交流,以及其中集成的麦克风和扬声器在救援过程中遇到幸存者便于了解其情况和转述救援指示。
52.一段尾211与消防水炮进行连接。在火场救灾仿生蝎机器人抵达火焰附近时,消防试剂通过一段尾211连接的圆管喷出,对火焰根部进行喷射和对火势进行压制。
53.识别单元14、控制器16、控制单元15配合使用,在识别单元14传回信息后,外界人员通过对现场环境的分析后,通过控制器16向控制单元15的信号接收器发送信号,通过行
走单元10的配合,模仿自然界蝎子的行走。
54.将连接于底盘11的六组行走单元10进行编号,从火场救灾仿生蝎机器人前端开始,左侧第一行走单元10为左一足,右侧第一行走单元10为右一足,以此类推,其余足为左二足,右二足,左三足,右三足。
55.第二电机2驱动连接件22、第三电机3和二段足4向上抬起即为抬起二段足4。
56.第二电机2驱动连接件22、第三电机3和二段足4向下落地并撑起火场救灾仿生蝎机器人即为放下二段足4。
57.第三电机3驱动二段足4的足尖向远离地面的方向旋转即为伸展二段足4。
58.第三电机3驱动二段足4的足尖向地面的方向旋转即为收起二段足4。
59.火场救灾仿生蝎机器人直行运动运动过程如下:当火场救灾仿生蝎机器人立于地面上时,控制器16发送执行指令后,控制单元15的信号接收器收到信号,由舵机控制板向各个电机发送信号,首先左一足、左三足、右二足抬起并收起二段足4,左二足、右一足、右三足的行走单元10中的第一电机1向后方旋转,推动火场救灾仿生蝎机器人向前;同时左一足、左三足、右二足的行走单元10中的第一电机1向前旋转,将左一足、左三足、右二足驱动至一个靠前的位置,随后左一足、左三足、右二足放下,并伸展二段足4,在火场救灾仿生蝎机器人稳定后左二足、右一足、右三足抬起并收起二段足4,此三足抬起后行走单元10中的第一电机1向前转动,同时左一足、左三足、右二足行走单元10中的第一电机1向后转动,推动火场救灾仿生蝎机器人向前,随后左一足、左三足、右二足放下,伸展二段足4落地撑起火场救灾仿生蝎机器人后,重复以上过程,实现火场救灾仿生蝎机器人向前行走。
60.火场救灾仿生蝎机器人旋转运动如下:当火场救灾仿生蝎机器人立于地面上时,控制器16发送执行指令后,控制单元15的信号接收器收到信号,由控制单元15的舵机控制板向各个电机发送信号,首先左一足、左三足、右二足抬起并收起二段足4,右一足、右三足的行走单元10中的第一电机1向火场救灾仿生蝎机器人后方旋转,左一足的行走单元10中的第一电机1向火场救灾仿生蝎机器人前方旋转,左右配合实现火场救灾仿生蝎机器人逆时针旋转;同时,左一足、左三足行走单元10中第一电机1向火场救灾仿生蝎机器人后方旋转,右二足行走单元10中的第一电机1向火场救灾仿生蝎机器人前方旋转,随后左一足、左三足、右二足放下,并且伸展二段足4落地撑起火场救灾仿生蝎机器人,随后右一足、右三足、左二足抬起并收起二段足4;右二足的行走单元10中的第一电机1向火场救灾仿生蝎机器人后方旋转,左一足,左三足的行走单元10中的第一电机1向火场救灾仿生蝎机器人前方旋转,左右配合实现火场救灾仿生蝎机器人逆时针旋转,同时,左二足行走单元10中第一电机1向火场救灾仿生蝎机器人后方旋转,右一足和右三足行走单元10中的第一电机1向火场救灾仿生蝎机器人前方旋转,随后右一足、右三足、左二足放下,并且伸展二段足4落地撑起火场救灾仿生蝎机器人,随后重复上述动作,实现火场救灾仿生蝎机器人逆时针旋转。
61.火场救灾仿生蝎机器人左行运动过程如下:当火场救灾仿生蝎机器人立于地面上时,左一足、左三足和右二足抬起,并且左一足和左三足伸展二段足4,右二足收起二段足4,随后,左二足收起一定角度的二段足4,右一足和右三足伸展一定角度的二段足4,此过程需保证火场救灾仿生蝎机器人仍被撑起,随后放下左一足、左三足和右二足,此时调整此三足行走单元10中的第二电机2确保撑起火场救灾仿生蝎机器人的同时,左一足和左三足的二段足4处于伸展状态,右二足的二段足4处于收缩状态,随后抬起左二足、右一足和右三足,
并且伸展左二足行走单元10中的二段足4,伸展右一足和右三足行走单元10中的二段足4,随后左二足的行走单元10中的二段足4收缩,右一足和右三足的行走单元10中的二段足4伸展,在保证火场救灾仿生蝎机器人被撑起的状态下,使火场救灾仿生蝎机器人向左侧直线移动,之后放下左二足、左三足和右二足,重复上述运动过程实现火场救灾仿生蝎机器人的向左直线运动。
62.火场救灾仿生蝎机器人的右行运动与左行运动过程相同,只需将运动过程中左右足的行走单元10中的二段足4的收缩和伸展进行调换即可。
63.火场救灾仿生蝎机器人高低姿态运如下:通过控制行走单元10中的第二电机2控制连接件22和二段足4之间的角度,此处指二段足4内凹部分与连接件22之间的夹角,从而控制火场救灾仿生蝎机器人的高度,经过数据仿真和实体测量,其角度范围为58.56
°‑
180
°
,火场救灾仿生蝎机器人离地高度为0-242mm,仅需调整行走单元10的第二电机2即可调整火场救灾仿生蝎机器人高低姿态进行运动。
64.火场救灾仿生蝎机器人,抓取动作如下:在识别单元14将现场情况将图像传输至安全位置的操作员后,当操作员认为需进行抓取排障等工作时,控制第一舵机5调整钳部单元12至合适位置后进行直行,当钳部单元12可以进行抓取工作后,控制第二舵机6进行抓取,随后进行火场救灾仿生蝎机器人高度调节,将障碍物抓起,随后控制第一舵机5进行排障工作。
65.也可将机械爪9更换为刀片等,进行切除工作。
66.火场救灾仿生蝎机器人,消防试剂喷射过程如下:通过识别单元14、控制单元15和控制器16的控制,使火场救灾仿生蝎机器人安全抵达起火物体附近后,通过旋转、左右直行运动,调整二段尾212正对起火物体,随后控制第四电机210驱动尾部执行单元13在竖直面内摆动,在确认可以喷射消防试剂后,外界开启消防水炮开关,使消防试剂通过二段尾212的圆孔喷射,同时控制第四电机210使尾部执行单元13上下摆动,对火焰根部进行喷射和对火势进行压制。
67.火场救灾仿生蝎机器人行走单元10的仿生节肢结构设计,使得火场救灾仿生蝎机器人能够左右前后旋转行动,且可调节行走高度,大大提高了机器人的通过性,使火场救灾仿生蝎机器人能够适应复杂的火场环境。
68.火场救灾仿生蝎机器人通过识别单元14的摄像头的旋转功能,能够更快捷的了解周围的情况,同时摄像头集成了红外线功能,在光线交叉的环境中仍能稳定可靠的传输图像。摄像头中还集成了麦克风和扬声器,在火场中发现受困者时可以与其进行交流,了解受困者身体情况、受困位置以及对其进行心理安慰,为救援工作的进行提供帮助。行走单元10采用三个电机控制,实现单个足的抬起和伸展,二段足4采用尖端设计,通过性强。由于每个足的独立控制,行走单元10可以实现火场救灾仿生蝎机器人多种角度的工作,同时运动方面,其可以实现横向行走和旋转。机械爪9的设计,使钳部单元12在抓取物体时更为牢靠,同时角度可调可以抓取更为多种多样的物体。配合行走单元10的多段足设计,使其可以对前方多个位置和高度进行抓取工作。一段尾211和二段尾212的连接采用内外齿配合的方式,在保证结构强度的同时还能够实现其一定角度的旋转。二段尾212中间开直径为30mm的圆孔,便于与消防水炮相连,喷射消防试剂。尾部执行单元13通过第四电机210连接于底盘11,使连接消防水炮的二段尾212角度在竖直平面可调,结合旋转,横向行走等运动,控制消防
试剂的喷射方向。底盘11外壳上方做成平面便于放置消防救援的物品。
69.以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1