一种无油全电式三层自动平衡裁断机的制作方法
1.本发明属于裁断机领域,具体涉及一种无油全电式三层自动平衡裁断机。
背景技术:
2.裁断机是一些轻工行业不可缺少的设备,借助于机器运动的作用力加压于刀模,对非金属材料进行冲型加工的机器。适合发泡材、纸板、纺织物、塑胶材料、皮革、橡胶、包装材料、地板材料、地毯、玻璃纤维、软木等非金属物料通过刀模借助机器产生的冲压力实现物料的冲切裁断。
3.现有的裁断机主要通过液压驱动,如中国发明专利cn108890776a一种精密四柱裁断机,通过设置于所述机架上的裁断平台,在液压油缸的驱动下,冲压固定式或非固定式的刀模。采用液压驱动的裁断机,存在液压油泄露风险,不适用于医疗、食品等行业的裁切;同时液压油缸效率低,速度慢,无法实现高速裁切。因此亟待设计一款电驱动的裁断机,以满足高洁净度、高速的要求。
技术实现要素:
4.针对现有技术所存在的上述不足,本发明要解决的技术问题是现有的裁断机主要通过液压驱动,无法执行高速裁切,精度不高,容易造成污染。
5.本发明的技术方案是:本发明提供一种无油全电式三层自动平衡裁断机,包括下工作台、上工作台、打击台,所述下工作台与上工作台通过连接件固定连接,打击台相对下工作台、上工作台做上下往复运动,
6.所述上工作台安装有伺服电机,伺服电机的输出轴连接有行星滚柱丝杠,行星滚柱丝杠的活动部与打击台连接,打击台安装有两组以上平衡连杆组件,平衡连杆组件保证打击台各处在升降过程中保持自动平衡,
7.所述打击台底部安装有一个以上移动头,移动头安装有可拆卸的刀模,移动头可沿打击台长度方向水平移动。
8.进一步地,所述上工作台为顶部开口的箱式结构,内部设置多块纵横交错的上支撑板,上支撑板上固定有丝杠轴承座,行星滚柱丝杠的外壳体安装在丝杠轴承座下部,伺服电机与丝杠轴承座之间安装有罩壳座,罩壳座内安装有联轴器,连轴两端连接伺服电机、行星滚柱丝杠。
9.进一步地,所述伺服电机的输出轴与行星滚柱丝杠的丝杠之间连接有减速机,行星滚柱丝杠的丝杠后部安装有多个角接触轴承,丝杠轴承座压紧最上部的角接触轴承。
10.进一步地,所述平衡连杆组件包括导向柱、固定块、u型铁、短连杆、摆板、长拉杆,每组平衡连杆组件包括两个摆板,摆板通过柱销铰接在上工作台内,柱销固定在上工作台内部且相对打击台中心对称设置;摆板为y型,两个摆板之间连接有长拉杆,摆板另一端通过短连杆、u型铁与导向柱活动连接;导向柱顶部固定连接有u型铁,导向柱底部通过固定块与上工作台连接。
11.进一步地,所述打击台包括底板、安装在底板上的多块交错的型材,平衡连杆组件的四根以上的导向柱与打击台上部均匀排布连接,行星滚柱丝杠的活动部与打击台上部中心连接。
12.本发明的有益效果:
13.本发明所述的无油全电式三层自动平衡裁断机,采用上工作台、下工作台、打击台的三层结构,在打击台上既可以手动放置刀模,也可以通过移动头冲压裁断;采用伺服电机与行星滚柱丝杠的冲压方式,无油驱动,无液压油的污染,适用于医疗、食品等要求较高的行业。同时可实现重载裁切,相比较液压驱动,裁切速度较快,效率较高。
附图说明
14.图1为本发明所述的无油全电式三层自动平衡裁断机的立体示意图;
15.图2为本发明所述的打击台、上工作台、伺服电机的正视示意图;
16.图3为本发明所述的打击台、上工作台、伺服电机的侧向剖视视示意图;
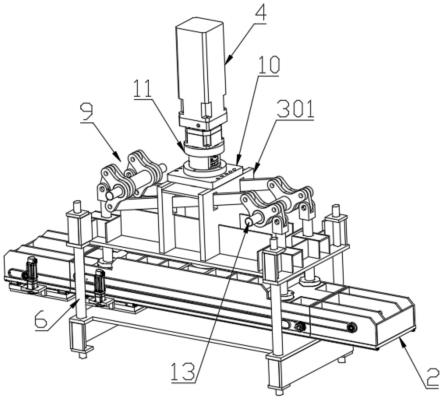
17.图4为本发明所述的打击台、上工作台、伺服电机的立体示意图;
18.图5为本发明所述的打击台、去除壳体的上工作台、伺服电机的立体示意图;
19.图6为本发明所述的伺服电机、行星滚珠丝杠、平衡连杆组件的立体示意图。
20.图中:1、下工作台;2、打击台;3、上工作台;301、上支撑板;4、伺服电机;5、移动头;6、连接件;7、角接触轴承;8、行星滚柱丝杠;9、平衡连杆组件;901、导向柱;902、固定块;903、u型铁;904、短连杆;905、摆板;906、长拉杆;10、丝杠轴承座;11、罩壳座;12、联轴器;13、柱销。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.如图1、2所示,一种无油全电式三层自动平衡裁断机,包括下工作台1、上工作台3、打击台2,下工作台1与上工作台3通过连接件6固定连接,打击台2相对下工作台1、上工作台3做上下往复运动。所述下工作台1的台面上安装有输送带,物料放置于输送带上送料与出料。下工作台1、上工作台3之间固定用的连接件6为立柱,打击台2穿过两根立柱。
23.如图3、5所示,上工作台3安装有伺服电机4,伺服电机4的输出轴连接有行星滚柱丝杠8,行星滚柱丝杠8的活动部与打击台2连接,打击台2安装有两组以上平衡连杆组件9,平衡连杆组件9保证打击台2各处在升降过程中保持自动平衡。
24.如图4所示,打击台2底部安装有一个或两个以上移动头5,移动头5安装有可拆卸的刀模,移动头5可沿打击台2长度方向水平移动。
25.在其中一个实例中,上工作台3为顶部开头的箱式结构,内部设置多块纵横交错的上支撑板301,上支撑板301上固定有丝杠轴承座10,行星滚柱丝杠8的外壳体安装在丝杠轴承座10下部,伺服电机4与丝杠轴承座10之间安装有罩壳座11,罩壳座11内安装有联轴器12,连轴两端连接伺服电机4、行星滚柱丝杠8。
26.如图5所示,在其中一个实例中,伺服电机4的输出轴与行星滚柱丝杠8的丝杠之间连接有减速机,行星滚柱丝杠8的丝杠后部安装有多个角接触轴承7,丝杠轴承座10压紧最上部的角接触轴承7。
27.如图5、6所示,在其中一个实例中,平衡连杆组件9包括导向柱901、固定块902、u型铁903、短连杆904、摆板905、长拉杆906,每组平衡连杆组件9包括两个摆板905,摆板905通过柱销13铰接在上工作台3内,柱销13固定在上工作台3内部且相对打击台2中心对称设置;摆板905为y型,两个摆板905之间连接有长拉杆906,摆板905另一端通过短连杆904、u型铁903与导向柱901活动连接;导向柱901顶部固定连接有u型铁903,导向柱901底部通过固定块902与上工作台3连接。
28.如图2、3所示,在其中一个实例中,打击台2包括底板、安装在底板上的多块交错的型材,平衡连杆组件9的四根以上的导向柱901与打击台2上部均匀排布连接,行星滚柱丝杠8的活动部与打击台2上部中心连接。
29.本发明的工作原理:
30.本发明与传统液压油缸驱动冲压头的设计区别在于,采用伺服电机4驱动行星滚柱丝杠8,为纯电方式。行星滚柱丝杠8具有运行速度高、承载能力强、环境适应性好以及使用寿命长等优点,负载可达100吨级别。伺服电机4可以通过联轴器12与行星滚柱丝杠8直接连接,也可通过减速机与行星滚柱丝杠8连接。行星滚柱丝杠8活动部与打击台2连接,上工作台3与下工作台1位置保持固定,形成三层结构,上工作台3、下工作台1形成龙门结构。打击台2尺寸较大,可超出下工作台1台面,安装多个移动头5,水平自由移动,裁切的形状种类更多。两个移动头5分别超出下工作台1台面两侧后,打击台2与下工作台1的接触面处可手工放置刀模进行裁切。
31.打击台2由于尺寸较大,如仅靠中心的行星滚柱丝杠8上下,容易形成偏移或扭转,导致与下工作台1接触不平。因此设置平衡连杆组件9,每组平衡连杆组件9包括两个摆板905、铰接摆板905的柱销13、连接摆板905的长拉杆906、两个导向柱901,导向柱901与摆板905通过u型铁903、短连杆904连接,从而保证连接处同上同下,保持平衡。根据打击台2尺寸,如打击台2宽度为500mm,可安装2组平衡连杆组件9;如打击台2尺寸为1200mm,可安装3组以上平衡连杆组件9。
32.以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1