基于负重转移的被动式上肢助力搬运外骨骼
1.本发明涉及外骨骼机器人领域,具体涉及一种基于负重转移的被动式上肢助力搬运外骨骼。
背景技术:
2.随着科学技术的发展,可穿戴的外骨骼由虚拟到现实,同时得到了快速的发展。由于外骨骼可以与人更好的贴合,对使用者提供更好的服务,如:正常人的助力,病人的康复,军人的辅助工作等方面的优点,成为了全球研究的热点。如今学术和工业等领域的全面发展,大多数被动式外骨骼也可以形成量产,如:手指康复外骨骼、踝足矫形器、护膝外骨骼等。由此可见,被动式外骨骼存在很好的发展空间和优势,非常符合当下智能制造的趋势。
3.目前,绝大多数工厂不能完全做到没有工人就可以完成需求的美好目标。因此,工人依旧是产业的主力。随着人口老年化的扩大,目前大多数工人依旧处于中老年的阶段。对于这个阶段的人群,由于长时间的劳动,对身体造成损伤,尤其是在搬运的过程。搬运动作对腰部会产生严重的压力,对腰部造成巨大的损伤。同时,搬运过程一般存在于工厂车间、工地楼层建筑、食品餐饮、人们的日常生活等。这些情景可以说覆盖了各种人群的各种工作。尽管工厂出现一些起重机,小推车等设备,帮助工人减少运输,可是不能很好地贴合工人的搬运工作,或多或少存在无法解决的问题。例如:车间内部空间有限,道路复杂,起重机难以进入,无法进行搬运。同时,在车间内部,重物的转移等,都需要工人自行搬举和运输。工人在进行搬举和运输动作时,对腰和体力都是巨大的挑战。
4.如今的搬运外骨骼也有很多,大多通过电机等元件进行助力,属于主动外骨骼,不难看出,外骨骼很重,制造成本也很昂贵。可量产的大多为被动外骨骼,可往往被动外骨骼结构简单,但功能单一,大多为康复使用。负重搬运重物的外骨骼很少,同时,搬运过程因人而异,对搬运外骨骼的设计也会产生障碍。这些被动搬运外骨骼必须要求使用者保持固定的搬运动作,人们无法很好的做到省力,拥有很好的穿戴舒适感。
技术实现要素:
5.本发明的目的在于提供一种基于负重转移的被动式上肢助力搬运外骨骼,该外骨骼可以将上肢肌肉力量和重物重力转移到重物搬起过程中处于弯曲的腰部,辅助腰部直立,从而缓解腰部肌肉强度,降低腰部损伤;同时,也可实现运输过程中重力转移,通过外骨骼将重力传递带腰部,减少重物运输对胳膊的负重,缓解胳膊长时间搬运产生的酸痛感,从而做到运输过程的有效省力。
6.为实现上述目的,本发明采用了以下技术方案:包括上下方向布置的上背板与下腰板,所述的上背板与下腰板分别通过绑带固定在人体的背部与腰部,且上背板与下腰板之间通过腰部支撑连杆机构及钢丝绳相连,所述下腰板的底部还设有腿部绑带,所述的上背板在远离人体背部的板面上沿左右方向对称设有左助力外骨骼及右助力外骨骼,所述的左助力外骨骼与右助力外骨骼结构相同,均分别包括背部力传动机构与手臂自锁机构;所
述的背部力传动机构包括水平方向布置的主动轴、固定在主动轴上的主动不完全齿轮、与主动轴相平行的从动轴、固定在从动轴上的从动轮及绕线轮,其中:从动轮与主动不完全齿轮相啮合,绕线轮通过钢丝绳连接下腰板,所述主动轴的一端设有电位计,主动轴的另一端通过肩关节与上臂连接板相连,所述钢丝绳的一端与绕线轮固定,所述钢丝绳的另一端与下腰板上设置的接线口固定;
7.所述的手臂自锁机构包括上臂板、前臂板以及连接上臂板与前臂板的肘关节,所述的肘关节包括与上臂板相连的固定盘、与前臂板相连且与固定盘形成转动配合的转动盘、与固定盘相配合的固定压盖,所述的肘关节内还设有离合机构,所述的离合机构用于限定上臂板与前臂板之间的转动角度并实现自锁或解锁,所述的上臂板通过固定支架与上臂连接板相连,前臂板的悬伸端通过吊钩杆连接吊钩,所述的上臂板上设有上臂固定套筒,所述的前臂板上设有前臂固定套筒。
8.所述的固定盘包括圆形的盘体,盘体的外侧面与上臂板底部的环状体螺钉连接,盘体的内侧面设有凸起的环形台;所述的转动盘包括转动盘体,所述的转动盘体靠近固定盘的盘面上设有凸起的非完整圆弧段,该非完整圆弧段的弧长为210
°
,所述的转动盘体远离固定盘的盘面上设有柱状凸台;所述的固定压盖包括与环形台外壁相配合的环形盖体,所述的环形盖体靠近固定盘的端面上设有与盘体螺钉连接的法兰盘,环形盖体的另一端设有封闭该端的端盖,所述的端盖上开设有供柱状凸台伸出的通孔,且前臂板的端部与柱状凸台螺钉连接;其中:环形台通过薄壁轴承与非完整圆弧段形成转动配合,薄壁轴承的内圈与非完整圆弧段的外壁配合,薄壁轴承的外圈与环形台的内壁配合,所述的柱状凸台上套设有压力轴承,压力轴承的外圈与通孔的内壁相配合。
9.所述的离合机构包括通过螺栓轴转动连接在盘体内侧面的转动杆,所述转动杆的转动中心与盘体中心之间为偏心结构,所述的转动杆整体呈“7”字型,由长杆和短杆连接而成,且长杆与短杆的夹角为135
°
,所述的长杆通过圆环弹簧与盘体上设置的弹簧固定螺栓连接,长杆上设置有与圆环弹簧相配合的直角通孔,所述的盘体上还设有限定长杆转动位置的第一限位螺钉。
10.所述的离合机构还包括离合卡扣,所述盘体的外侧面上开设有容纳离合卡扣的凹槽,所述的离合卡扣包括前端突起部、中间转动部以及末端按压部,所述凹槽的槽底设有与前端突起部相配合的第一通孔以及与中间转动部相配合的第二通孔,所述的中间转动部通过销体与盘体形成转动配合,且盘体的外侧面上设有限定销体位置的压销块,所述的末端按压部与凹槽的槽底之间通过复位弹簧连接,在初始站立姿态下,离合卡扣的前端突起部通过第一通孔凸出于盘体的内侧面,离合卡扣的末端按压部凸出于盘体的外侧面,且离合卡扣的前端突起部与第一限位螺钉分列于长杆的两侧。
11.所述的离合机构还包括与离合卡扣相配合的滑动压块,所述的滑动压块为一体结构,包括与前臂板平行且通过螺钉固定的固定板、与固定板相垂直的折弯板、与折弯板相垂直且与固定板相平行的压块板,所述压块板的端部设有压块,所述的压块在前臂板转动时可形成与离合卡扣的末端按压部相按压或相分离的状态。
12.所述的绕线轮通过绕线法兰盘与从动轴相连,所述的绕线轮包括大小结构相同的第一线盘与第二线盘,所述的第一线盘及第二线盘之间留有间距用于绕线,且第一线盘及第二线盘通过四个第一螺栓与绕线法兰盘固连;
13.所述第一线盘与第二线盘的盘面上均分别设有四组连接孔,每组连接孔由七个孔洞组成,所述的七个孔洞沿线盘的中心向线盘的边缘呈弧形分布,七个孔洞通过极坐标形式分布,以盘面中心为极点,每个孔洞位置分布是极径相差3mm,由20mm~38mm,极角相差18
°
,由0
°
~108
°
,第一线盘及第二线盘在每组连接孔相对应的孔洞处设有连接第一线盘与第二线盘的第二螺栓,第一线盘与第二线盘之间的第二螺栓上套设有轴套,四组轴套形成钢丝绳的绕线柱。
14.所述的腰部支撑连杆机构包括长度可调的背杆,所述的背杆包括通过螺钉相连的第一杆体及第二杆体,所述背杆的一端与固定在上背板上的第一连杆支座铰接,背杆的另一端与腰杆的一端铰接相连,所述腰杆的另一端与固定在下腰板上的第二连杆支座铰接,所述的第二连杆支座上还设有限定腰杆转动角度的第二限位螺钉,在初始站立姿态下腰杆与第二限位螺钉相抵靠,且此状态下腰杆与下腰板之间的夹角为32
°
。
15.所述的肩关节包括与主动轴固定连接的肩部铰链、与肩部铰链铰接相连的肩部调节板,所述的肩部调节板可沿肩部铰链实现上下方向的转动,所述的肩部调节板与上臂连接板相连,且上臂连接板在肩部调节板上的连接位置可调。
16.所述的固定支架整体呈u型,包括与上臂连接板相固定的第一板体、与上臂板相固定的第二板体以及连接第一板体及第二板体的第三板体,所述的第一板体与上臂连接板的固定位置可调,所述的第二板体与上臂板的固定位置可调,所述的第三板体与第一板体及第二板体的固定位置可调,且第三板体的长度可调。
17.所述的主动轴通过一对第一轴承座固定在上背板上,所述的从动轴通过一对第二轴承座固定在上背板上,所述的上背板上还设有齿轮限位块,在初始站立姿态下,齿轮限位块限定主动不完全齿轮处于非转动状态。
18.由上述技术方案可知,本发明的外骨骼可在搬举过程中通过上肢肌肉力量和重物重力辅助腰部直立,从而减少腰部损伤。同时在搬起后的运输过程中,通过离合机构的自锁功能,将外骨骼上臂板与前臂板的角度锁定,通过限位,将重力通过外骨骼转移到躯干,缓解胳膊长时间搬运产生的酸痛感,从而做到运输过程的有效省力。在到达目的地时,通过前臂向上屈曲较小的角度进行解锁,然后即可正常放下重物。本发明的外骨骼可以满足不同使用者的搬举姿势,并提供助力,在运输过程中重力转移到腰部,可以省力,减少人们的腰部损伤;具有贴合人体、成本低廉,适用场合广等优点。
附图说明
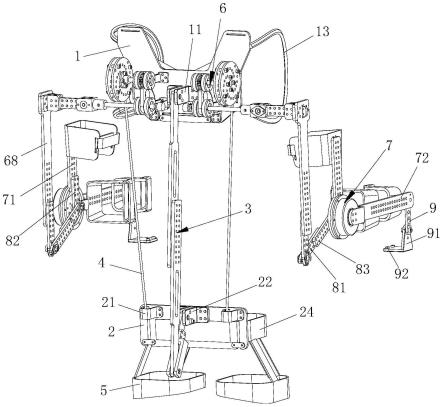
19.图1是本发明的立体结构示意图一;
20.图2是本发明的立体结构示意图二;
21.图3是本发明背部力传动机构结构示意图;
22.图4是本发明绕线轮的结构示意图;
23.图5是本发明第一线盘的结构示意图;
24.图6是本发明第一线盘一组连接孔的排列示意图;
25.图7是本发明腰部支撑连杆机构的初始状态图;
26.图8是本发明腰部支撑连杆机构在弯腰时的状态示意图;
27.图9是本发明手臂自锁机构的结构示意图一;
28.图10是本发明手臂自锁机构的结构示意图二;
29.图11是本发明固定盘的结构示意图一;
30.图12是本发明固定盘的结构示意图二;
31.图13是本发明转动盘的结构示意图一;
32.图14是本发明转动盘的结构示意图二;
33.图15是本发明固定压盖的结构示意图;
34.图16是本发明转动杆的结构示意图;
35.图17是本发明滑动压块的结构示意图;
36.图18是本发明离合卡扣的结构示意图;
37.图19是本发明手臂自锁机构的剖面结构示意图一;
38.图20是本发明手臂自锁机构的剖面结构示意图二;
39.图21是本发明手臂自锁机构的分解结构示意图;
40.图22是本发明手臂自锁机构在初始状态时离合机构的内部结构图;
41.图23是本发明手臂自锁机构在搬举状态时离合机构的内部结构图;
42.图24是本发明手臂自锁机构在搬举自锁状态时离合机构的内部结构图;
43.图25是本发明手臂自锁机构在解锁状态时离合机构的内部结构图;
44.图26是本发明手臂自锁机构在解锁后放下重物时离合机构的内部结构图;
45.图27是本发明手臂自锁机构在放下重物瞬时离合机构的内部结构图。
46.上述附图中的标记为:上背板1、第一连杆支座11、齿轮限位块12、背部绑带13、下腰板2、接线口21、第二连杆支座22、第二限位螺钉23、腰部绑带24、腰部支撑连杆机构3、背杆31、第一杆体311、第二杆体312、腰杆32、钢丝绳4、腿部绑带5、背部力传动机构6、主动轴61、第一轴承座611、主动不完全齿轮62、从动轴63、第二轴承座631、从动轮64、绕线轮65、绕线法兰盘651、第一线盘652、螺栓安装孔6521、第二线盘653、第一螺栓654、孔洞655、第二螺栓656、轴套657、电位计66、肩关节67、肩部铰链671、肩部调节板672、上臂连接板68、手臂自锁机构7、上臂板71、上臂固定套筒711、前臂板72、前臂固定套筒721、固定盘73、盘体731、凹槽7311、第一通孔7312、第二通孔7313、环形台732、转动盘74、转动盘体741、非完整圆弧段742、非完整圆弧段末端7421、非完整圆弧段前端7422、柱状凸台743、固定压盖75、环形盖体751、法兰盘752、端盖753、通孔7531、薄壁轴承76、压力轴承77、转动杆78、长杆781、直角通孔7811、短杆782、圆环弹簧783、弹簧固定螺栓784、第一限位螺钉785、螺栓轴786、离合卡扣79、前端突起部791、中间转动部792、末端按压部793、销体794、压销块795、复位弹簧796、滑动压块70、固定板701、折弯板702、压块板703、压块704、固定支架8、第一板体81、第二板体82、第三板体83、吊钩杆9、吊钩91、防滑螺钉92。
具体实施方式
47.下面结合附图对本发明做进一步说明:
48.如图1、图2所示的一种基于负重转移的被动式上肢助力搬运外骨骼,包括上下方向布置的上背板1与下腰板2,上背板1与下腰板2分别通过绑带固定在人体的背部与腰部,且上背板1与下腰板2之间通过腰部支撑连杆机构3及钢丝绳4相连,下腰板2的底部还设有腿部绑带5。
49.具体的,如图7、图8所示,腰部支撑连杆机构3包括长度可调的背杆31,背杆31包括通过螺钉相连的第一杆体311及第二杆体312,通过第一杆体311及第二杆体312的连接位置可以调整背杆31的长度以适用于不同的使用者。背杆31的一端与固定在上背板1上的第一连杆支座11铰接,背杆31的另一端与腰杆32的一端铰接相连,腰杆32的另一端与固定在下腰板2上的第二连杆支座22铰接,第二连杆支座22上还设有限定腰杆32转动角度的第二限位螺钉23,在初始站立姿态下腰杆32与第二限位螺钉23相抵靠,且此状态下腰杆32与下腰板2之间的夹角为32
°
。
50.具体的,上背板1通过背部绑带13固定在人体的背部,下腰板2通过腰部绑带24固定在人体的腰部。优选的,背部绑带13穿戴在人体上且在胸前位置呈现x型交叉方式,使上背板1更加贴合人体。腰部绑带24及腿部绑带5选用类似登山安全带的结构,使下腰板2更加贴合人体。同时,上背板1及下腰板2与人体接触的板面均贴覆有海绵,保证人体舒适度。背部绑带13及腰部绑带24均带有调节环和卡扣,方便穿戴和调整。进一步的,上背板1在远离人体背部的板面上沿左右方向对称设有左助力外骨骼及右助力外骨骼,左助力外骨骼与右助力外骨骼结构相同,均分别包括背部力传动机构6与手臂自锁机构7。
51.具体的,如图3所示,背部力传动机构6包括水平方向布置的主动轴61、固定在主动轴61上的主动不完全齿轮62、与主动轴61相平行的从动轴63、固定在从动轴63上的从动轮64及绕线轮65,主动轴61与主动不完全齿轮62同步转动,从动轴63、从动轮64及绕线轮65同步转动。其中:从动轮64与主动不完全齿轮62相啮合,绕线轮65通过钢丝绳4连接下腰板2,主动轴61的一端设有电位计66,主动轴61的另一端通过肩关节67与上臂连接板68相连。这里的电位计66主要是在实验过程中用于测量主动轴的角度,测量与统计不同人在搬举过程中上臂连接板68的角度,在实际使用中可以不装配电位计66。
52.具体的,主动轴61通过一对第一轴承座611固定在上背板1上,从动轴63通过一对第二轴承座631固定在上背板1上,上背板1上还设有齿轮限位块12,在初始站立姿态下,齿轮限位块12限定主动不完全齿轮62处于非转动状态。
53.具体的,钢丝绳4的一端与绕线轮65固定,绕线轮65通过绕线法兰盘651与从动轴63相连,钢丝绳4的另一端与下腰板2上设置的接线口21固定。在搬举时,上臂屈曲偏角因人而异,为保持钢丝绳绷直,可通过接线口21调节。另外,每个人从腰部弯曲到直立的收缩长度不同,收线长度应略大于收缩长度,所以收线长度也需要调节。此外,由于身高差距较大的人,腰部收缩长度变化范围较小,故绕线轮65应具有多级或无级调节的功能。如图4、图5、图6所示,绕线轮65的具体结构如下:绕线轮65包括大小结构相同的第一线盘652与第二线盘653,第一线盘652及第二线盘653之间留有间距用于绕线,且第一线盘652及第二线盘653通过四个第一螺栓654与绕线法兰盘651固连。第一线盘652与第二线盘653的盘面上均分别设有四组连接孔,每组连接孔由七个孔洞655组成,七个孔洞655沿线盘的中心向线盘的边缘呈弧形分布,七个孔洞655通过极坐标形式分布,以盘面中心为极点,每个孔洞位置分布是极径相差3mm,由20mm~38mm,极角相差18
°
,由0
°
~108
°
,第一线盘652及第二线盘653在每组连接孔相对应的孔洞处设有连接第一线盘652与第二线盘653的第二螺栓656,第一线盘652与第二线盘653之间的第二螺栓656上套设有轴套657,四组轴套657形成钢丝绳4的绕线柱。
54.以第一线盘652为例:第一线盘652的中心处设有四个与第一螺栓相配合的螺栓安
装孔6521,除此之外,还设有四组呈弧形布置的连接孔,本实施例中,每组连接孔包括七个孔洞,七个孔洞655通过极坐标形式分布,以盘面中心为极点,每个孔洞位置分布是极径相差3mm,由20~38mm,极角相差18
°
,由0
°
~108
°
,即相邻两个孔洞655的半径间隔3mm,由20mm~38mm;角度间隔为18
°
,由0
°
~108
°
。根据第二螺栓656在七个孔洞中的固定位置的不同,可以调节第二螺栓656距离第一线盘652中心的距离,从而在绕线轮65转动固定角度的情况下,根据第二螺栓656位置的不同,绕线的直径会发生变化,以此调整收线长度,实现小范围无极调节。通过这种次排列方式,就可以实现多级调节,不需要根据不同使用者设计不同的绕线轮,适用范围更广,还节约时间和成本。与此同时,通过扇形排列,大大减少绕线轮直径,可以做到减重、减小外骨骼宽度的目的。
55.具体的,肩关节67包括与主动轴61固定连接的肩部铰链671、与肩部铰链671铰接相连的肩部调节板672,肩部调节板672可沿肩部铰链671实现上下方向的转动,肩部调节板672与上臂连接板68相连,且上臂连接板68在肩部调节板672上的连接位置可调。背部力传递的具体过程是:使用者弯腰伸臂搬运时,腰部发生弯曲与伸展,后背整体会拉伸。在使用者弯腰后,调节背部钢丝绳使其处于绷紧状态,此时钢丝绳处于拉直但无拉力状态。
56.进一步的,如图9、图10所示,手臂自锁机构7包括上臂板71、前臂板72以及连接上臂板71与前臂板72的肘关节,上臂板71上设有上臂固定套筒711,前臂板72上设有前臂固定套筒721,上臂板71通过固定支架8与上臂连接板68相连,前臂板72的悬伸端通过吊钩杆9连接吊钩91。优选的,上臂固定套筒711与前臂固定套筒721均通过手臂绑带与人穿戴,手臂绑带均带有调节环和卡扣,方便穿戴和调整。
57.具体的,吊钩杆9的两端分别与前臂板72的末端及连接吊钩91销钉连接,可以相对转动,吊钩91上设有防滑螺钉92,防滑螺钉92拧在吊钩91对应的螺纹孔中,有效限位,防止绳类重物滑落。
58.具体的,固定支架8整体呈u型,包括与上臂连接板68相固定的第一板体81、与上臂板71相固定的第二板体82以及连接第一板体81及第二板体82的第三板体83,第一板体81与上臂连接板68的固定位置可调,第二板体82与上臂板71的固定位置可调,第三板体83与第一板体81及第二板体82的固定位置可调,且第三板体83的长度可调。具体的,肘关节包括与上臂板71相连的固定盘73、与前臂板72相连且与固定盘73形成转动配合的转动盘74、与固定盘73相配合的固定压盖75。具体的,如图11、图12所示,固定盘73包括圆形的盘体731,盘体731的外侧面与上臂板71底部的环状体螺钉连接,盘体731的内侧面设有凸起的环形台732;如图13、图14所示,转动盘74包括转动盘体741,转动盘体741靠近固定盘73的盘面上设有凸起的非完整圆弧段742,该非完整圆弧段742的弧长为210
°
,转动盘体741远离固定盘73的盘面上设有柱状凸台743;如图15所示,固定压盖75包括与环形台732外壁相配合的环形盖体751,环形盖体751靠近固定盘73的端面上设有与盘体731螺钉连接的法兰盘752,环形盖体751的另一端设有封闭该端的端盖753,端盖753上开设有供柱状凸台743伸出的通孔7531,且前臂板72的端部与柱状凸台743螺钉连接;其中:环形台732通过薄壁轴承76与非完整圆弧段742形成转动配合,薄壁轴承76的内圈与非完整圆弧段742的外壁配合,薄壁轴承76的外圈与环形台732的内壁配合,柱状凸台743上套设有压力轴承77,压力轴承77的外圈与通孔7531的内壁相配合。
59.具体的,如图19、图20、图21所示,肘关节内还设有离合机构,离合机构用于限定上
臂板71与前臂板72之间的转动角度并实现自锁或解锁。如图16所示,转动杆78通过螺栓轴786转动连接在盘体731上,转动杆78的转动中心与盘体731中心之间为偏心结构,转动杆78整体呈“7”字型,由长杆781和短杆782连接而成,且长杆781与短杆782的夹角为135
°
。长杆781通过圆环弹簧783与盘体731上设置的弹簧固定螺栓784连接,长杆781上设置有与圆环弹簧783相配合的直角通孔7811,具体的,转动杆78通过螺栓轴786转动连接在盘体731内侧面,弹簧固定螺栓784固定在盘体731的内侧面上,圆环弹簧783的一端与弹簧固定螺栓784连接,圆环弹簧783的另一端与的直角通孔7811连接,圆环弹簧783对长杆781起一个拉动作用,长杆781盘体731上还设有限定长杆781转动位置的第一限位螺钉785。
60.具体的,离合机构还包括离合卡扣79,盘体731的外侧面上开设有容纳离合卡扣79的凹槽7311,如图18所示,离合卡扣79包括前端突起部791、中间转动部792以及末端按压部793,凹槽7311的槽底设有与前端突起部791相配合的第一通孔7312以及与中间转动部792相配合的第二通孔7313,中间转动部792通过销体794与盘体731形成转动配合,且盘体731的外侧面上设有限定销体794位置的压销块795,末端按压部793与凹槽7311的槽底之间通过复位弹簧796连接,在初始站立姿态下,离合卡扣79的前端突起部791通过第一通孔7312凸出于盘体731的内侧面,离合卡扣79的末端按压部793凸出于盘体731的外侧面,且离合卡扣79的前端突起部791与第一限位螺钉785分列于长杆781的两侧。
61.具体的,离合机构还包括与离合卡扣79相配合的滑动压块70,如图17所示,滑动压块70为一体结构,包括与前臂板72平行且通过螺钉固定的固定板701、与固定板701相垂直的折弯板702、与折弯板702相垂直且与固定板701相平行的压块板703,压块板703的端部设有压块704,压块704在前臂板72转动时可形成与离合卡扣79的末端按压部793相按压或相分离的状态。
62.本发明的工作原理及工作过程如下:
63.在整个搬运过程中,分为两个阶段,一是外骨骼辅助使用者搬举,对应背部力传动机构6;二是外骨骼辅助使用者运输,对应手臂自锁机构7。其中,由于人体搬运动作的连贯性,使用者在搬举时,上臂和前臂共同在进行屈曲动作,可能会存在搬举过程与自锁过程共同进行,搬举过程结束时,对应的自锁过程结束,进而运输过程开始。这些因人而异,也可先后进行,并不影响外骨骼的使用。
64.使用前,使用者穿戴好外骨骼,保持外骨骼手臂部分自然伸直,呈自由下落状态,从而开始进行搬运。
65.一、搬举阶段由于人体在搬举阶段主要分为深蹲搬举和弯腰搬举,所以该外骨骼在搬举阶段也分为两种情况。第一种是使用者采用深蹲搬举方式。这时使用者的上臂向前屈曲,搬举重物可以产生上臂向后伸展转动的力矩,加上用力较小的肱三头肌,肩背部肌肉群等力量使上臂向后伸展,通过外骨骼可将上肢肌肉力量和重物重力传递到后背,辅助深蹲搬举过程中的腰部直立。第二种是使用者采用弯腰搬举方式。这时由于胳膊竖直,重物无法产生转动力矩提供助力,故使用者只能将用力较小的肱三头肌、肩背部肌肉群等力量由上臂向后伸展,通过外骨骼将上肢肌肉力量和重物重力传递到后背,辅助弯腰搬举过程中的腰部直立。两种方式的共同点在于:上臂向前屈曲,与腰部存在偏角,搬举过程偏角逐渐减小到近似重合。此时,使用者上臂的转动带动上臂板71转动,上臂板71通过固定支架8带动上臂连接板68转动。由于肩部铰链671只对肩关节外展内收有限制,不影响肩关节的伸展
与屈曲,所以上臂连接板68会通过肩部连接板68带动主动轴61共同转动。此时,主动轴61上的主动不完全齿轮62带动从动齿轮64和从动轴63转动,从而带动绕线轮65转动,对钢丝绳4进行收卷,这时钢丝绳4产生拉力辅助腰部直立。搬举过程中,由于腰部直立和上臂偏角减小,因此,需控制钢丝绳4的收线略大于腰部直立后的收缩长度,即可实现直立过程的腰部助力。
66.二、运输阶段
67.外骨骼在运输过程中,通过上臂板71与前臂板72的自锁,将重物重力经过外骨骼传递到躯干,缓解胳膊长时间屈曲搬运产生的酸痛感,从而做到运输过程的有效省力。下面结合图22~图27具体说明:
68.以右侧手臂为例,正对右侧手臂判断旋转方向,具体过程是:在使用者搬举时,手臂处于伸直状态,离合机构中的转动杆78在圆环弹簧783的拉力作用下处于正常位置,即长杆781落在转动盘74上非完整圆弧段742的内壁上。这时离合卡扣79的末端按压部793被前臂板72上固定连接的压块704压住,离合卡扣79的前端突起部791收缩到固定盘73内。随着搬举过程的进行,前臂屈曲,滑动压块70中的压块704随之向上转动,松开离合卡扣79的末端按压部793,由于末端按压部793与凹槽7311之间设有复位弹簧796,复位弹簧796在弹性作用下使末端按压部793复位,此时离合卡扣79的前端突起部791恢复到突出位置。同时,随着前臂屈曲角度增大,前臂与上臂夹角减少,由180
°
转向95
°
,这时转动盘74上的非完整圆弧段742逆时针转动,非完整圆弧段742的缺口对应转动杆78的长杆781端,转动杆78在圆环弹簧783的拉力作用下,从原来位置向后滑动,被后面的第一限位螺钉785限制转动。此时,前臂放下,回到90
°
附近,由于转动杆78落下并被第一限位螺钉785和非完整圆弧段742的末端7421限位,转动盘74上的非完整圆弧段742顺时针回转时,非完整圆弧段742的末端7421被长杆781限位,这时上臂与前臂夹角在90
°
附近,此时为锁定状态。同时人腰部直立,主动轴61上的主动不完全齿轮62的行程末端通过齿轮限位块12限制上臂继续向后伸展转动,这时重力就由外骨骼转移到躯干,并保持搬运姿势,实现省力。
69.当使用者需要放下重物时,前臂继续屈曲,相对上臂上抬,夹角减小。此时,转动盘74随前臂逆时针转动,非完整圆弧段742的前端7422会触碰转动杆78的短杆782,并推动转动杆78的短杆782,使其逆时针转动。当前臂转动受阻时,这时由于压块704随着前臂继续屈曲,与第二板体82与第三板体83的连接处产生限位,停止前臂屈曲,大约是40
°
。这时,转动杆78的长杆781逆时针转动,下压并滑过了离合卡扣79的前端突起部791,同时底部位于离合卡扣79的前端上方,由于离合卡扣79的末端按压部793设有复位弹簧796,故滑过离合卡扣79前端,并发生下压,通过后立马复位,将转动杆78限位,此时离合机构解锁。前臂伸展,上臂与前臂夹角变大,回到180
°
,将重物放下。这时固定在前臂板72上的压块704刚好按压离合卡扣79的末端按压部793,此时转动杆78释放,恢复到刚开始的搬举状态,外骨骼整体复位。
70.本发明的外骨骼在工作时,可以大致分为以下几个阶段:开始
→
搬举
→
搬举自锁
→
解锁
→
放下。
71.在开始阶段,即上臂与前臂呈180
°
夹角时,此时转动杆78的长杆781的端部与非完整圆弧段742的内壁接触,离合卡扣79在复位弹簧796的作用下,其前端突起部791收缩到固定盘73内。
72.在搬举阶段,由于人体搬运动作的连贯性,使用者在搬举时,上臂与前臂共同在进行屈曲动作,可能会存在搬举过程与自锁过程共同进行,搬举过程结束时,对应的自锁过程结束,进而运输过程开始。这些因人而异,也可先后进行,并不影响外骨骼的使用。
73.在搬举自锁阶段,即上臂与前臂从180
°
转向95
°
时,此时非完整圆弧段742的缺口对应转动杆78的长杆781端,转动杆78的长杆781的端部在圆环弹簧783的作用下与限位螺钉785点接触;然后上臂与前臂夹角从95
°
转向90
°
时,此时转动杆78的长杆781的端部与非完整圆弧段742的末端7421线接触,从而转动杆78的长杆781端部阻挡转动盘74的顺时针运动。
74.在解锁阶段,上臂与前臂夹角从90
°
转向50
°
时,转动盘74随前臂逆时针转动,非完整圆弧段742的前端7422会触碰转动杆78的短杆782,并推动转动杆78的短杆782,使其逆时针转动。当前臂转动受阻时,停止前臂屈曲。在此过程中,转动杆78的长杆781逆时针转动,下压并滑过了离合卡扣79的前端突起部791,同时底部位于离合卡扣79的前端上方,由于离合卡扣79的末端按压部793设有复位弹簧796,故滑过离合卡扣79前端,并发生下压,通过后立马复位,前端突起部791向固定盘73内突出,将转动杆78限位,此时离合机构解锁。
75.在放下阶段,上臂与前臂夹角从50
°
转向180
°
时,这时固定在前臂板72上的压块704刚好按压离合卡扣79的末端按压部793,此时转动杆78释放,从而恢复到初始位置。在以上阶段,转动杆78的短杆782均与薄壁轴承76的内圈留有间隙。
76.运输阶段需要背部支撑,故腰部支撑连杆机构3在运输中起到支撑和传递重力的作用。腰部支撑连杆机构3在使用者站立运输时,腰杆32由于第二限位螺钉23的作用,无法继续绕第二连杆支座22逆时针转动(由人体右边向左看),腰部支撑连杆机构3固定。当搬举和放重物时,随着腰的弯曲,腰部拉伸,肩部与腰部发生相对位移,距离增加。此时,背杆31在弯腰的条件下,往前位移,与腰杆32角度变大,故腰杆32绕第二连杆支座22进行顺时针转动,从而尽可能保持外骨骼与人运动贴合。当腰部直立时,腰部收缩,肩部与腰部发生相对位移,距离减小。此时,背杆31在直腰的条件下,往后位移,与腰杆32角度变小,故腰杆32绕第二连杆支座22进行逆时针转动。此时,腰部支撑连杆机构3在使用者站立时,腰杆32由于第二限位螺钉23的作用,无法继续绕第二连杆支座22逆时针转动,此时腰部支撑连杆机构3在行走过程中可以起到一定的支撑作用。这时人们在运输重物时,重力通过固定的腰部支撑连杆机构3传到腰部。
77.本发明的有益效果为:
78.1)本发明可以缓解搬举过程中的腰部肌肉强度。该外骨骼通过上肢力量和重物的力量辅助使用者弯腰后的直立,大大缓解腰椎末端压力,减少腰部损伤。
79.2)本发明可以缓解运输过程中手臂的静态工作肌肉强度。该外骨骼通过离合机构的自锁,在运输过程中,将重物重力通过外骨骼传递到腰部,通过重力转移实现省力,极大缓解手臂长时间屈曲搬运产生的肌肉酸痛。
80.3)本发明结构巧妙,操作简单。该外骨骼根据人体运动结合机械结构,巧妙实现重力转移和调用上肢松弛的肌肉力量,实现省力和助力。搬运过程和正常搬运大体一致。在自锁过程和解锁过程中,只需要前臂伸展较小角度就可实现自锁和解锁。
81.4)本发明质量轻,成本低,制作简单。该外骨骼含有大部分平板件,随着科技进步,碳纤维板成本下降,可直接机器切割成型,取代人工铝合金制作,故采用碳纤维板材,极大
减轻质量。此外,该外骨骼相对于主动助力外骨骼,没有电池、电机等较重的零部件,大大减轻外骨骼的重量,同时节约成本。拥有质量轻、成本低的优点。
82.5)本发明自由度高,满足人们搬运过程中大多姿势。该外骨骼纯被动设计,在人手臂的各个关节都设有转动铰链;同时机械运动都是由人体运动而运动,包括关节之间的共同运动,先后有序运动等,贴合搬运者的运动习惯。
83.6)本发明穿戴方便,覆盖人群广。该外骨骼绑带穿戴,类似于高空作业安全带,穿戴方便,包裹性好,更好贴合人体。同时,外骨骼在各个关节件、绑带都设有调节,覆盖标准男性上下约15公分的人群,更好的扩大外骨骼使用范围。
84.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1