全自动冲切胶片装置的制作方法
1.本发明涉及胶片生产设备,特别是一种全自动冲切胶片装置。
背景技术:
2.橡胶制品在生产过程中通常涉及到胶片的成型,也就是将开炼好的胶片冲切出一定的形状。现有的冲切模式为人工将开炼好的方形胶片搬运至冲切机的伸出平台,人工放置要成型的胶片形状的刀模至方形胶片之上,并将冲切机的伸出平台推入冲切机内,按下冲切按钮后完成一次冲切任务,再由人工将冲切平台拽出,人工将冲切后的废料扯掉将成型的胶片转运到称重平台上进行称重,并记录重量,在此期间前面的工人要等待此工序的完成。称重合格的胶片人工搬运至事前准备的托盘上,每层胶片放下后要铺上一层隔离布,防止胶片与胶片之间的黏连,最后将合格的胶片通过叉车转运至组装工序的工作台进行组装。此工序用到的操作人员众多,而且在工作过程中存在发生工伤的危险,因此需要一种全自动冲切胶片装置解决上述问题。
3.授权公告号为cn215881825u的中国发明公开了一种胶塞冲切上料设备,该发明的上料是单工位依次进行,效率低。
技术实现要素:
4.本发明旨在解决上述技术问题,从而提供一种全自动冲切胶片装置,提供胶片生产产量。
5.本发明解决其技术问题,采用的技术方案是:一种全自动冲切胶片装置,包括冲切机构、称重机构,所述冲切机构置于冲切输送线的中部,冲切输送线的两端分别设有废胶分离机构和向冲切机构输送胶片的冲切工位,冲切输送线的前后两侧对称布设第一转运平台和第二转运平台,第一转运平台的外侧布设半成品输送带,第一转运平台的中部与半成输送带之间设有第一抓取输送线,第一抓取输送线设有第一抓取机构; 两个所述转运平台的两端之间对称设有第二抓取输送线和第三抓取输送线,第二抓取输送线、第三抓取输送线均设有第二抓取机构和第三抓取机构,第二转运平台的外侧布设成品输送带,第二转运平台的中部与成品输送带之间布设第四抓取输送线,第四抓取输送线设有第四抓取机构,称重机构位于成品输送带的末端。
6.采用上述技术方案的本发明于现有技术相比,有益效果是:1、 实现了胶片的自动搬运、冲切、抓取、废料分离、称重、运输的功能;2、双工位运行,当一个工位冲切结束并进行转运的同时另一个工位胶片运行至冲切位,减少了等待时间,提高了产量;3、冲切完成后废料分离机构可以将周围废料分离,防止在吸取时因为胶料本身特性造成的二次粘连,影响胶片分离;4、节省人工费用,降低成本,提高安全性。
7.进一步的,本发明的优化方案是:
所述冲切输送线包括支撑架、滑动轨道、滑动块、第一伺服电机和驱动带,两个支撑架对称置于冲切机构的左右两端,两个支撑架之间铺设贯穿冲切机构的滑动轨道,滑动块与滑动轨道配合并与驱动带连接,驱动带位于滑动轨道的外侧,驱动带由第一伺服电机驱动,驱动带的一端伸入冲切机构内。
8.所述冲切工位包括压板、定位柱和弹簧,压板通过定位柱与滑动块连接,定位柱贯穿压板,压板与滑动块之间的定位柱套设弹簧。
9.所述第一转运平台包括转运机架、导轨、滑块、转运平台板、驱动皮带和第二伺服电机,转运机架上部的两侧均铺设导轨,置于导轨上方的转运平台板与滑块固接,转运平台板的长度为机架长度的三分之二,转运平台板与驱动皮带连接,驱动皮带由第二伺服电机驱动,转运平台板设有第一工位和第二工位。
10.所述第一抓取输送线包括第一抓取机架、横梁导轨和横梁滑块,第一抓取机架的上横梁跨设在半成品输送带的内端和第一转运平台的中部,第一抓取机架的上横梁的底面固接横梁导轨,横梁滑块与横梁导轨滑动连接。
11.所述第一抓取机构包括吸盘、吸盘安装架、固定架、导向柱、吸盘气缸、跟随固定架、跟随滑动副、跟随伺服电机、跟随齿轮齿条机构、平移齿轮齿条机构和平移伺服电机,多个吸盘安装在吸盘安装架的底面板,吸盘安装架的顶面板通过吸盘气缸和导向结构与固定架连接,固定架通过跟随滑动副与跟随固定架连接,跟随固定架与横梁滑块连接,固定架与跟随固定架之间设有跟随齿轮齿条机构,跟随齿轮齿条机构由跟随伺服电机驱动,跟随固定架与第一抓取机架的上横梁之间设有平移齿轮齿条机构,平移齿轮齿条机构由平移伺服电机驱动。
12.所述第二抓取输送线包括第二抓取机架和抓取横梁,两个第二抓取机架分别纵向架设在第一转运平台和第二转运平台的上方,两个第二抓取机架的两端之间分别跨设抓取横梁。
13.所述第二抓取机构和第三抓取机构置于抓取横梁的下方,第二抓取机构与抓取横梁的连接结构、第三抓取机构与抓取横梁的连接结构均与第一抓取机构和上横梁的连接结构相同,第二抓取机构和第三抓取机构沿运送方向设置。
14.所述废胶分离机构为四个,分别布设于压板四角的上方,包括支撑杆、上分离气缸、转接板、下分离气缸、连接板和导柱,支撑杆与支撑架固接,支撑杆的上端安装水平的上分离气缸,上分离气缸的活塞杆的外端固接竖向的转接板,转接板的外板面固接竖向的下分离气缸,下分离气缸的活塞杆安装水平的连接板,连接板外端的底面固接导柱。
15.所述冲切输送线的下方设有废胶输送线。
附图说明
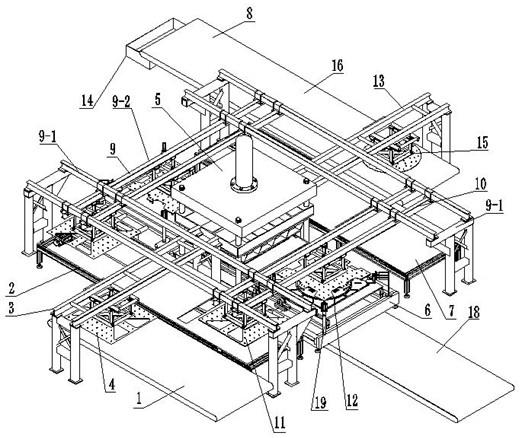
16.图1是本发明实施例的立体结构示意图;图2是本发明实施例的俯视图;图3是本发明实施例的冲切输送线立体结构示意图;图4是本发明实施例的冲切输送线的俯视图;图5是图4的主视图;图6是图4的左视图;
图7是冲切输送线的驱动带示意图;图8是本发明实施例的转运平台的俯视图;图9是图8的a-a剖视图;图10是本发明实施例的第一抓取输送线的主视图;图11是图10的俯视图;图12是图10的左视图;图13是本发明实施例的废胶分离机构的立体结构示意图;图14是本发明实施例的废胶分离机构的主视图;图15是本发明实施例的胶片示意图。
17.图中:半成品输送带1;第一转运平台2;转运机架2-1;导轨2-2;滑块2-3;转运平台板2-4;第一工位2-4-1;第二工位2-4-2;驱动皮带2-5;第二伺服电机2-6;压接板2-7;第一抓取输送线3;第一抓取机架3-1;横梁导轨3-2;横梁滑块3-3;上横梁3-4;第一抓取机构4;吸盘4-1;吸盘安装架4-2;固定架4-3;导向柱4-4;吸盘气缸4-5;滑套4-6;跟随滑动副4-7;跟随固定架4-8;跟随齿轮齿条机构4-9;跟随伺服电机4-10;平移齿轮齿条机构4-11;平移伺服电机4-12;冲切机构5;下支墩5-1;冲压平台5-2;导柱5-3;上支墩5-4;液压缸5-5;冲切输送线6;左支撑架6-1;右支撑架6-2;滑动轨道6-3;滑动块6-4;第一伺服电机6-5;驱动带6-6;改向带轮6-7;主动带轮6-8;压板6-9;定位柱6-10;弹簧6-11;第二转运平台7;成品输送带8;第二抓取输送线9;第二抓取机架9-1;抓取横梁9-2;第三抓取输送线10;第二抓取机构11;第三抓取机构12;第四抓取输送线13;废胶收集箱14;第四抓取机构15;下道组装工序16;称重机构17;废胶输送线18;废胶分离机构19;支撑杆19-1;上分离气缸19-2;转接板19-3;下分离气缸19-4;连接板19-5;柱19-6;胶片20;成型胶片20-1;切边废胶20-2;内圆废胶20-3。
具体实施方式
18.下面结合附图和实施例进一步详述本发明。
19.参加图1、图2,本实施例是一种全自动冲切胶片装置,主要由冲切机构5和依次平行布设的半成输送带1、第一转运平台2、冲切输送线6、第二转运平台7和成品输送带8构成。
20.冲切机构5置于冲切输送线6的中部,冲切机构5主要由下支墩5-1、冲压平台5-2、导柱5-3、上支墩5-4和液压缸5-5构成。下支墩5-1和上支墩5-4之间安装四根导柱5-3,冲压平台5-2位于上支墩5-4和液压缸5-5之间并与导柱5-3滑动连接,液压缸5-5的缸体与上支墩5-4螺接,液压缸5-5的活塞杆竖向穿过上支墩5-4与冲压平台5-2螺接。
21.冲切输送线6主要由左支撑架6-1、右支撑架6-2、滑动轨道6-3、滑动块6-4、第一伺服电机6-5和驱动带6-6(图3-图6所示),左支撑架6-1和右支撑架6-2对称置于冲切机构5的左右两端,两个支撑架均为焊接构件,左支撑架6-1和右支撑架6-2之间铺设两条纵向的滑动轨道6-3,滑动轨道6-3贯穿冲切机构5,滑动轨道6-3开设截面为u形的滑槽,滑动块6-4置于滑动轨道6-3的滑槽内。
22.左支撑架6-1和右支撑架6-2上分别设置冲切工位,冲切工位主要由压板6-9、定位柱6-10和弹簧6-11构成,压板6-9开设中心圆孔,其两侧分别通过四组定位柱6-10与滑动块6-4连接,每组定位柱6-10为三个,定位柱6-10的上端贯穿压板6-9,定位柱6-10的下端与滑
动块6-4焊接或螺接,压板6-9与滑动块6-4之间的定位柱6-10套设弹簧6-11,弹簧6-11起减震的作用。
23.左支撑架6-1的两侧对称安装驱动带6-6(图7所示),封闭环绕的驱动带6-6呈t形布设,其绕设在四个改向带轮6-7和一个主动带轮6-8上,四个改向带轮6-7分别与左支撑架6-1转动连接,内端的改向带轮6-7位于冲切机构5内并靠近右支撑架6-2,驱动带6-6由下部的主动带轮6-8驱动,主动带轮6-8安装在第一伺服电机6-5上,第一伺服电机6-5安装在左支撑架6-1上,上部的两个改向带轮6-7均设置涨紧机构。压板6-9的两侧分别通过两个固定板与驱动带6-6连接,两个固定板压紧驱动带6-6,驱动带6-6为平带或同步带。
24.冲切输送线6的前侧和后侧分别设置第一转运平台2和第二转运平台7。第一转运平台2主要由转运机架2-1、导轨2-2、滑块2-3、转运平台板2-4、驱动皮带2-5和第二伺服电机2-6构成(图8、图9所示),机架2-1上部的两侧均铺设导轨2-2,滑块2-3与导轨2-2滑动配合。水平的转运平台板2-4置于导轨2-2的上方并与滑块2-3连接,转运平台板2-4为长方形,其长度为机架2-1长度的三分之二,转运平台板2-4的中部开设垂直于输送方向的长孔,该长孔将转运平台板2-4均分为第一工位2-4-1和第二工位2-4-2。转运平台板2-4的底部通过压接板2-7与驱动皮带2-5连接,驱动皮带2-5由安装在转运机架2-1一端中间的主动轮驱动,主动轮安装在第二伺服电机2-6上,第二伺服电机2-6通过电机支架安装在转运机架2-1上,转运机架2-1另一端的中间安装从动轮。
25.第一转运平台2的前侧设置半成品输送带1,半成品输送带1的内端位于第一转运平台2的中部位置,半成品输送带1的内端与第一转运平台2的中部之间设置横向的第一抓取输送线3。第一抓取输送线3主要由第一抓取机架3-1、横梁导轨3-2和横梁滑块3-3构成(图10-图12所示),第一抓取机架3-1的上横梁3-4横跨半成品输送带1和第一转运平台2,该上横梁3-4的底面安装横梁导轨3-2,横梁滑块3-3与横梁导轨3-2滑动连接。
26.第一抓取机架3-1的下方设置第一抓取机构4,第一抓取机构4主要由吸盘4-1、吸盘安装架4-2、固定架4-3、导向柱4-4、吸盘气缸4-5、滑套4-6、跟随滑动副4-7、跟随固定架4-8、跟随齿轮齿条机构4-9、跟随伺服电机4-10、平移齿轮齿条机构4-11和平移伺服电机4-12构成。吸盘安装架4-2为焊接构件,其由水平的底面板、顶面板和连接杆构成,连接杆置于底面板和顶面板之间,多个吸盘4-1安装在底面板的底面。吸盘安装架4-2的顶面板通过吸盘气缸4-5与固定架4-6连接,吸盘安装架4-2与固定架4-6之间设置导向结构,导向结构由四根导向柱4-4和滑套4-6构成,滑套4-6与固定架4-6固定连接,导向柱4-4置于滑套4-6内,导向柱4-4的下端固接于吸盘安装架4-2的顶面板的角部,吸盘气缸4-5驱动吸盘安装架4-2上下运动。
27.固定架4-6的上端通过跟随滑动副4-7与跟随固定架4-8连接,跟随滑动副4-7的跟随滑块与矩形的固定架4-6连接,跟随滑动副4-7的跟随导轨安装在跟随固定架4-8的底部,跟随导轨与第一抓取机架3-1的上横梁3-4垂直。固定架4-6与跟随固定架4-8之间安装跟随齿轮齿条机构4-9,跟随齿轮齿条机构4-9的齿条安装在跟随固定架4-8的底部,跟随齿轮齿条机构4-9的齿轮安装在跟随伺服电机4-10上,跟随伺服电机4-10安装在固定架4-6上。
28.跟随固定架4-8的顶部与横梁滑块3-3固定连接,跟随固定架4-8与第一抓取机架3-1的上横梁3-4之间安装平移齿轮齿条机构4-11,平移齿轮齿条机构4-11的齿条安装在上横梁3-4的底面,平移齿轮齿条机构4-11的齿轮安装在平移伺服电机4-12上,平移伺服电机
4-12安装在跟随固定架4-8的外侧。第一抓取机构4将半成品输送带1上的胶片20吸起后输送到第一转运平台2的第一工位2-4-1或第二工位2-4-2上。
29.第一转运平台2的左右两端与第二运平台7的左右两端之间对称布设第二取输送线9和第三抓取输送线10。第二抓取输送线9主要由两个第二抓取机架9-1和抓取横梁9-2构成,两个第二抓取机架9-1分别纵向架设在第一转运平台2与第二运平台7上方,两个第二抓取机架9-1的左右两端之间分别跨设抓取横梁9-2。两个第二抓取机架9-1和左端的抓取横梁9-2构成第二抓取输送线9,两个第二抓取机架9-1和右端的抓取横梁9-2构成第三抓取输送线10。
30.第二取输送线9安装第二抓取机构11和第三抓取机构12,第二抓取机构11、第三抓取机构12的结构与第一抓取机构4结构相同,第二抓取机构11、第三抓取机构12与第二取输送线9的连接结构与第一抓取机构4与第一抓取输送线3的结构相同。第二抓取机构11和第三抓取机构12沿输送方向布设。第三抓取输送线10安装二抓取机构11和第三抓取机构12,第一抓取机构4、第二抓取机构11和第三抓取机构12的吸盘安装架4-2的底面板为方形。
31.第二运平台7的外侧布设成品输送带8,第二转运平台7的中部与成品输送带8之间布设第四抓取输送线13,第四抓取输送线13设置第四抓取机构15,第四抓取输送线13的结构与第一抓取输送线3的结构相同,第四抓取机构15的结构与第一抓取机构4的结构相同,第四抓取机构15的吸盘安装架4-2的底面板为圆形。称重机构17位于成品输送带8的末端。
32.冲切输送线6的下方设置废胶输送线18,为了便于废胶的分离,在冲切输送线6的左支撑架6-1和右支撑架6-2的端部分别设置一组废胶分离机构,每组四个废胶分离机构,分别布设压板6-8四角的上方。每个废胶分离机构19主要由支撑杆19-1、上分离气缸19-2、转接板19-3、下分离气缸19-4、连接板19-5和压柱19-6构成,竖直的支撑杆19-1的下端安装在左支撑架6-1或右支撑架6-2上,支撑杆19-1的上端安装水平的上分离气缸19-2,上分离气缸19-2沿压板6-9的对角线方布设,上分离气缸19-2的上方和下方分别设置水平的导杆,导杆的内端贯穿支撑杆19-1,上分离气缸19-2的活塞杆的外端和导杆的外端安装竖向的转接板19-3,下分离气缸19-4的活塞杆安装水平的连接板19-5,连接板19-5外端的底面安装压柱19-6。
33.本实施例的工作过程是:方形的胶片20通过半成品输送带1运输到第一抓取输送线3的第一抓取机构4正下方,第一抓取机构4的吸盘4-1将胶片20吸起搬运至第一转运平台2的转运平台板2-4的第一工位2-4-1后放下胶片20,转运平台板2-4的第一工位2-4-1运动至第二抓取输送线9的下方,第二抓取机构11移动至胶片20正上方,将胶片20吸起后运送至冲切输送线6的左支撑架6-1的压板6-9上,此时,第三抓取机构12位于第二转运平台7的上方。
34.第一伺服电机6-5和驱动带6-6驱动压板6-9和胶片20进入冲切机构5内,冲切机构5的液压缸5-5带动冲压平台5-2下压胶片20,将胶片20冲切裁断,在冲切的同时冲切平台5-2内部设有打料机构,将胶片20的内圆废胶20-3打落至下部的废胶输送线18上,同时,第二抓取机构11运动至第一转运平台2的上方,第三抓取机构12运动至左支撑架6-1上方等待,冲切完成后,压板6-9和胶片20回位运动至第三抓取机构12的下方,废胶分离机构19的上分离气缸19-2的活塞杆伸出,下分离气19-4的活塞杆驱动压柱19-6下移压住切边废胶20-2,第三抓取机构12将成型胶片20-1吸起输送到第二转运平台7的转运平台板2-4的第一工位
2-4-1上,第二转运平台7的转运平台板2-4将成型胶片20-1运送到第四抓取输送线13的第四抓取机构15正下方,第四抓取机构15将成型胶片20-1输送到成品输送带8,成型胶片20-1在成品输送带8上向前运输经自动称重机构17,成型胶片20-1经过的同时称重机构17会对成型胶片20-1进行称重,重量在预先设定的胶片重量范围内的会被机械手抓取后转运至下道组装工序16,重量不合格的会沿着成品输送带8继续向前运行后落入成品输送带8末端的废胶收集箱14,等待重新利用。切边废胶20-2由第二抓取机构11或第三抓取机构12吸起后,转运平台板2-4的第一工位2-4-1进入冲切机构5内,切边废胶20-2落入左支撑架6-1的空隙内,落入废胶输送线18上。
35.上述过程为一侧工位的第二抓取输送线9的运行全过程,对称位置的第三抓取输送线10在上述动作过程的间隙穿插完成相应的动作。第一转运平台2的转运平台板2-4的第一工位2-4-1运动至第二抓取输送线9的第二抓取机构11的下方时,第一抓取机构4将半成品输送带1上的下一片胶片20吸起搬运至第一转运平台2的转运平台板2-4的第二工位2-4-2,第二抓取输送线9的第二抓取机构11将上一片胶片20吸起后,转运平台板2-4的第二工位2-4-2运动到第三抓取输送线10的第二抓取机构11的下方,第二抓取机构11将下一片胶片20运送至右支撑架6-2的压板6-9上,此时,左支撑架6-1的压板6-9在冲切机构5内,左支撑架6-1的压板6-9的上一片胶片20冲切完成移出冲切机构5的同时,右支撑架6-2的压板6-9和下一片胶片20进入冲切机构5冲切,冲切完成后,第三抓取输送线10的第三抓取机构12将成型胶片20-1吸起输送到第二转运平台7的转运平台板2-4的第二工位2-4-2上,转运平台板2-4的第二工位2-4-2运动至第四抓取输送线13的第四抓取机构15正下方,第四抓取机构15将成型胶片20-1输送到成品输送线16,后续动作过程与第二抓取输送线9、成品输送带8相同。
36.以上所述仅为本发明较佳可行的实施例而已,并非因此局限本发明的权利范围,凡运用本发明说明书及附图内容所作的等效结构变化,均包含于本发明的权利范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1