一种单驱间歇式电动旋转夹爪的制作方法
本发明涉及机械手,具体涉及一种单驱间歇式电动旋转夹爪。
背景技术:
1、随着科技的进步,时代的发展,在工业生产中,由于人力成本高,效率低,无法满足生产需求。因此机器人在工业生产中占据了不可替代的地位。在机器人的设计中,末端夹爪是不可或缺的装置,由于面对的工况不同,夹爪的结构也各不相同,甚至细分为一个专门的机械手领域。针对高密度电子装备由于安装空间狭小、设备密集、且操作空间有限的装配运维难题,现如今市场上机械手的研究大多以实现智能抓取和放回为目的,较少有针对螺装类零件装配问题来研究。也有以旋转为目的的夹爪,但抓取与旋转机械手以轴向进给居多,在针对螺装类零件时可能会产生干涉。且有的机械手体积较大,不适宜在狭小空间下工作。相较于传统机械手连续旋转方式,存在一个缺点:在螺装类零件轴向方向上不能有其他干涉,例如螺装类零件末端若有导线,则普通机械手在回转过程中可能会导致导线与机械手缠绕,造成零件的损坏或机械手的损坏。若采用径向进给且连续旋转方式,其所占空间大,与狭小空间装备会产生诸多干涉;若采用径向进给且间歇旋转方式,则夹爪所工作范围固定,无法解决被夹持工件直径变化带来的问题。因此本发明研制单驱间歇式旋转夹爪来克服上述缺点。
2、鉴于上述缺陷,本发明创作者经过长时间的研究和实践终于获得了本发明。
技术实现思路
1、本发明的目的在于提供一种使用单驱同时实现间歇式旋转与张合的电动夹爪。
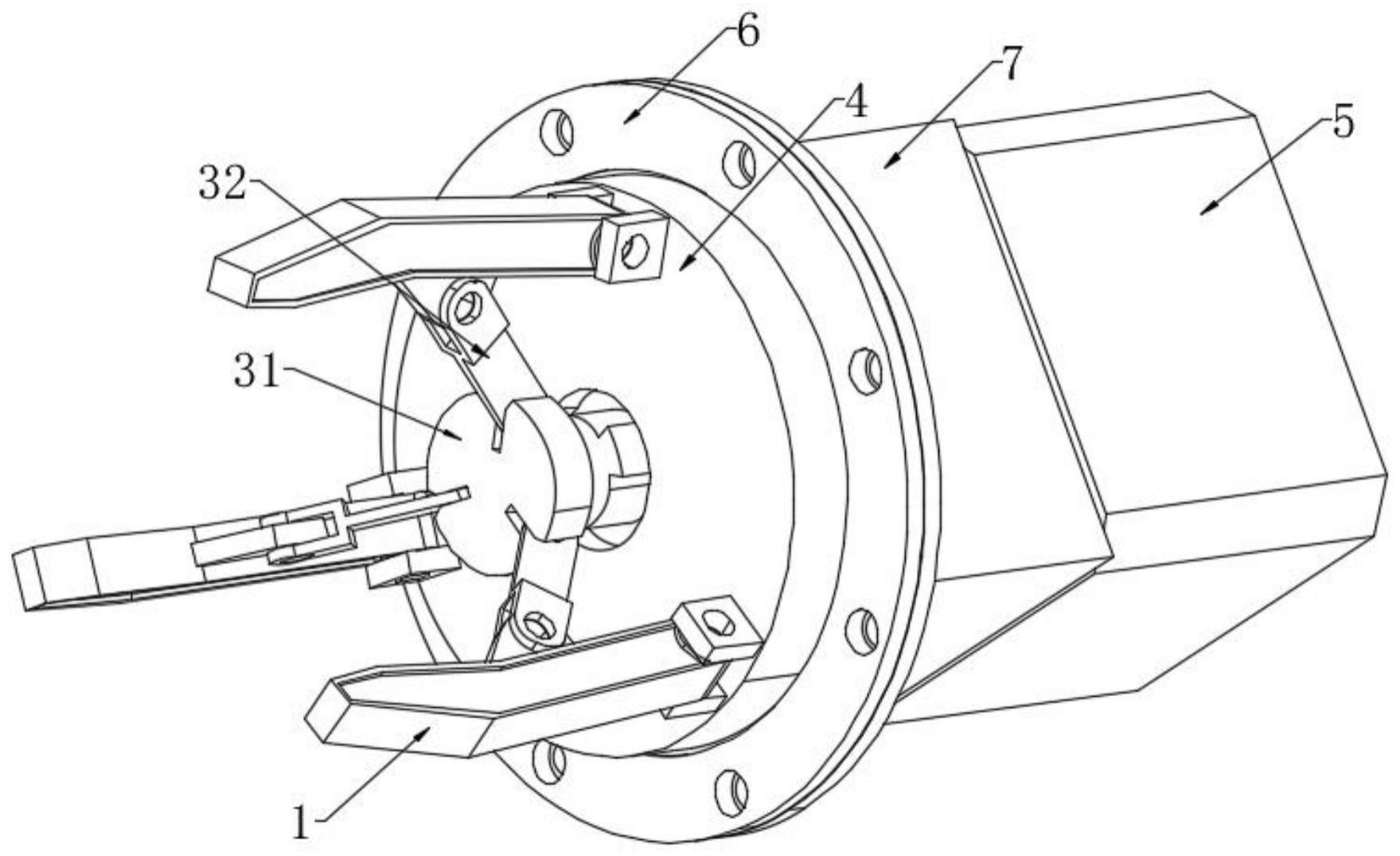
2、本发明是通过以下技术方案解决上述技术问题的,本发明包括电机、丝杆、内螺纹套、行星传动机构、离合机构、连动机构与多个柔性爪指;所述丝杆固定于电机的输出端,所述内螺纹套与丝杆螺纹连接,所述内螺纹套、连动机构与柔性爪指依次连接,多个所述柔性爪指均翻转安装于行星传动机构的一端,所述离合机构用于内螺纹套与行星传动机构的连接,且由电机的运行使其具有分离与啮合两种状态,分离状态下,所述电机驱动连动机构沿丝杆轴向移动,实现多个柔性爪指的张合;啮合状态下,所述电机驱动多个柔性爪指同时进行张合与旋转。
3、优选的,所述行星传动机构包括太阳齿轮、多个行星齿轮、行星架与内齿圈;所述太阳齿轮位于内齿圈内部,多个所述行星齿轮均匀分布与太阳齿轮与内齿圈之间,多个所述行星齿轮均与太阳齿轮以及内齿圈啮合连接,所述行星架固定于丝杆,多个所述行星齿轮均通过轮轴转动安装于行星架。
4、优选的,还包括夹爪壳体,所述夹爪壳体固定于电机与行星传动机构之间,所述丝杆与内螺纹套位于夹爪壳体内部,所述电机与夹爪壳体通过多个螺柱固定连接。
5、优选的,所述行星传动机构还包括密封盖与法兰盘;所述密封盖通过法兰盘转动安装于夹爪壳体,所述内齿圈固定于密封盖内壁,多个所述柔性爪指均翻转安装于密封盖端面,多个所述柔性爪指呈环形整列分布。
6、优选的,所述行星齿轮的数量为三个。
7、优选的,所述太阳齿轮的中心位置开设有开孔;所述离合机构导向键与弧形槽;所述内螺纹套穿过开孔,所述导向键固定于内螺纹套外侧,所述弧形槽开设于太阳齿轮且与开孔连通,且所述导向键位于弧形槽内,所述弧形槽圆周方向的长度大于导向键圆周方向的长度,所述导向键与弧形槽的一侧壁接触时,限制太阳齿轮旋转为啮合状态;所述导向键在弧形槽内相对移动时为分离状态。
8、优选的,所述连动机构包括拉杆、连接盘与多个连杆;所述拉杆与内螺纹套转动连接,所述连接盘固定于拉杆的端部,多个所述连杆的内端均与连接盘铰接,多个所述连杆的外端分别与多个柔性爪指铰接。
9、与现有技术比较本发明的有益效果在于:
10、1、仿照人手拧瓶盖原理,将夹紧与旋转只用一个电机实现,大大节省了空间与经济成本,创造性的解决了小空间下机械手无法到达工件的问题,且夹紧力不变,不会破坏工件;
11、2、采用柔性爪指,既不会破坏工件,又减少了自由度数目,使得夹爪整体轻量化,简洁化。
技术特征:
1.一种单驱间歇式电动旋转夹爪,其特征在于,包括电机、丝杆、内螺纹套、行星传动机构、离合机构、连动机构与多个柔性爪指;所述丝杆固定于电机的输出端,所述内螺纹套与丝杆螺纹连接,所述内螺纹套、连动机构与柔性爪指依次连接,多个所述柔性爪指均翻转安装于行星传动机构的一端,所述离合机构用于内螺纹套与行星传动机构的连接,且由电机的运行使其具有分离与啮合两种状态,分离状态下,所述电机驱动连动机构沿丝杆轴向移动,实现多个柔性爪指的张合;啮合状态下,所述电机驱动多个柔性爪指同时进行张合与旋转。
2.如权利要求1所述的一种单驱间歇式电动旋转夹爪,其特征在于,所述行星传动机构包括太阳齿轮、多个行星齿轮、行星架与内齿圈;所述太阳齿轮位于内齿圈内部,多个所述行星齿轮均匀分布与太阳齿轮与内齿圈之间,多个所述行星齿轮均与太阳齿轮以及内齿圈啮合连接,所述行星架固定于丝杆,多个所述行星齿轮均通过轮轴转动安装于行星架。
3.如权利要求2所述的一种单驱间歇式电动旋转夹爪,其特征在于,还包括夹爪壳体,所述夹爪壳体固定于电机与行星传动机构之间,所述丝杆与内螺纹套位于夹爪壳体内部,所述电机与夹爪壳体通过多个螺柱固定连接。
4.如权利要求3所述的一种单驱间歇式电动旋转夹爪,其特征在于,所述行星传动机构还包括密封盖与法兰盘;所述密封盖通过法兰盘转动安装于夹爪壳体,所述内齿圈固定于密封盖内壁,多个所述柔性爪指均翻转安装于密封盖端面,多个所述柔性爪指呈环形整列分布。
5.如权利要求2所述的一种单驱间歇式电动旋转夹爪,其特征在于,所述行星齿轮的数量为三个。
6.如权利要求2所述的一种单驱间歇式电动旋转夹爪,其特征在于,所述太阳齿轮的中心位置开设有开孔;所述离合机构导向键与弧形槽;所述内螺纹套穿过开孔,所述导向键固定于内螺纹套外侧,所述弧形槽开设于太阳齿轮且与开孔连通,且所述导向键位于弧形槽内,所述弧形槽圆周方向的长度大于导向键圆周方向的长度,所述导向键与弧形槽的一侧壁接触时,限制太阳齿轮旋转为啮合状态;所述导向键在弧形槽内相对移动时为分离状态。
7.如权利要求1所述的一种单驱间歇式电动旋转夹爪,其特征在于,所述连动机构包括拉杆、连接盘与多个连杆;所述拉杆与内螺纹套转动连接,所述连接盘固定于拉杆的端部,多个所述连杆的内端均与连接盘铰接,多个所述连杆的外端分别与多个柔性爪指铰接。
技术总结
本发明公开一种单驱间歇式电动旋转夹爪,包括电机、丝杆、内螺纹套、行星传动机构、离合机构、连动机构与多个柔性爪指;所述丝杆固定于电机的输出端,所述内螺纹套与丝杆螺纹连接,所述内螺纹套、连动机构与柔性爪指依次连接,多个所述柔性爪指均翻转安装于行星传动机构的一端,所述离合机构用于内螺纹套与行星传动机构的连接;本发明仿照人手拧瓶盖原理,将夹紧与旋转只用一个电机实现,大大节省了空间与经济成本,创造性的解决了小空间下机械手无法到达工件的问题,且夹紧力不变,不会破坏工件;采用柔性爪指,既不会破坏工件,又减少了自由度数目,使得夹爪整体轻量化,简洁化。
技术研发人员:吴文志,胡子翔,张亚玎,王梅,王志海,胡婉璐,程林,韦开君,邱汉青
受保护的技术使用者:中国电子科技集团公司第三十八研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!