一种基于FPGA的下肢外骨骼机器人关节驱动控制系统
本发明涉及驱动控制系统的,尤其涉及基于fpga的下肢外骨骼机器人关节驱动控制系统。
背景技术:
1、下肢外骨骼机器人是一种人机结合的机械装置,它犹如盔甲一样直接套在人体下肢腿外侧,并通过在关节处设置驱动力来实现助力辅助,从而增强人们行走的能力和速度,缓解人在大负重和长时间行走下极易出现的疲劳感,在工业、军事、医疗等领域下肢外骨骼机器人均有广阔的应用前景。
2、而下肢外骨骼机器人关节驱动控制系统是实现其主要功能的重要环节,控制系统性能的好坏将直接影响下肢外骨骼机器人的柔顺性、可靠性、实时性及灵敏度等相关动态特性,同时控制系统还应满足小型化、集成化等技术特性。
3、对于关节驱动控制系统主要包括控制系统、传感器、驱动元件及机械设备主体等几部分构成,对于驱动元件,目前常用的有电机驱动、气压驱动和液压驱动;对于控制系统硬件主要包括主控装置和驱动连接装置,对于电机驱动控制其控制硬件通常采用的是单片机、dsp等,随着数据量的增大,处理速率较慢,不能很好的处理复杂化的场景。
4、
技术实现思路
1、本发明目的是提供一种基于fpga的下肢外骨骼机器人关节驱动控制系统,简化了控制模式,控制精度高,实现了控制系统的紧凑化和小型化。
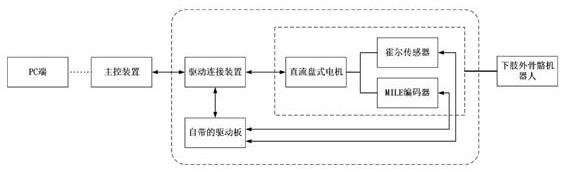
2、一种基于fpga的下肢外骨骼机器人关节驱动控制系统,包括依次连接的主控装置、驱动连接装置、驱动元件、下肢外骨骼机器人。
3、优选的是,本发明的驱动元件,采用电机,搭配着谐波减速器安装于下肢外骨骼机器人的髋关节和膝关节处,驱动关节转动;所述电机上集成了霍尔传感器和数字增量式编码器;所述电机通过插头-插座的连接形式,与驱动连接装置进行连接,实现数据传递。
4、优选的是,本发明的驱动连接装置,包括:
5、为驱动连接装置提供工作电压的主电源电路;包括电源插座,用于和外部输入24v直流电压进行连接;
6、为电机运行安全提供保障的安全保护电路;包括电源插头,用于和外部输入24v直流电压进行连接;电源转换芯片,用于将直流24v电压转为直流5v电压,和电机自带的驱动板一起实现对电机进行保护;
7、用于和电机插头进行连接的电机插座电路,包括电机插座,用于和电机三相插头进行连接;
8、用于和霍尔传感器插头进行连接的霍尔传感器插座电路,包括霍尔传感器插座,用于和集成在电机上的霍尔传感器进行连接;
9、用于和编码器插头进行连接的编码器插座电路,包括编码器插座,用于和集成在电机上的数字增量式编码器进行连接;
10、用于和主控装置实现can通信的can通信插座电路,包括can通信插座,用于和主控装置进行can通信。
11、用于和电机自带的驱动板进行连接的排母电路,包括32p和46p的排母,所述排母的间距p=2.54mm。
12、优选的是,本发明的主控装置,包括分别与电源电路、电源滤波电路、时钟晶振电路、jtag接口电路、can通信电路、外围电路、存储电路、复位电路连接;所述的电源电路分别与电源滤波电路、时钟晶振电路、jtag接口电路、can通信电路、外围电路、存储电路、复位电路连接的fpga处理器。
13、所述电源电路将输入电压转换为fpga处理器、时钟晶振电路、jtag接口电路、can通信电路、外围电路、存储电路、复位电路的工作电压;所述电源滤波电路与电源端相连,用于滤除电源中的电流脉冲;所述时钟晶振电路为fpga处理器提供恒定的周期时钟;所述jtag接口电路下载比特流文件并发送给fpga处理器;所述can通信电路用于和驱动连接装置进行can通信;所述外围电路用于对下载的比特流文件进行调试;所述存储电路一方面用于存储下载的比特流文件和can通信传递的比特流数据,掉电后不丢失文件。另一方面实现存储内存空间外扩,满足大内存需求场合;所述复位电路对fpga处理器及比特流文件进行初始化处理。
14、优选的是,本发明的电源电路,包括第一转换电路,用于将外部供电电源输入电压直流12v转为直流5v,电源转换芯片型号为mp2359;第二转换电路,用于将直流5v电压转为直流3.3v,电源转换芯片型号为ams1117-3.3;第三转换电路,用于将直流5v电压转为直流2.5v,电源转换芯片型号为ams1117-2.5;第四转换电路,用于将直流5v电压转为直流1.2v,电源转换芯片型号为ams1117-1.2。第一转换电路输出的直流5v电压经过自锁开关的闭合再传递至第二、三、四转换电路,自锁开关型号为tk-6850-1;外部直流12v电压通过dc插头传递至所述电源电路,dc插头型号为dc005-t25。
15、优选的是,本发明的电源滤波电路,至少设置一个滤波电容位于电源端与接地端之间,电源滤波电路均设置在pcb板正面,且靠近所述芯片源端及电子元器件;
16、所述时钟晶振电路,包括时钟频率为50mhz的有源晶振,所述有源晶振型号为osc5032-50mhz-3.3v;
17、所述jtag接口电路,包括下载接头,所述下载接头型号为简牛b-3000n10p-0110;
18、所述can通信电路,包括can总线收发芯片,所述can总线收发芯片型号为tja1050;
19、所述外围电路,其特征在于包括轻触按键开关以及led灯,所述轻触按键开关型号为ts-1101-c-w;所述led灯型号为17-21/bhc-xl2m2ty/3t。
20、优选的是,本发明的存储电路,包括外扩内存存储空间的sdram芯片和存储比特流文件使掉电后不丢失文件的flash rom芯片,所述sdram芯片型号为w9825g6kh-6;所述flash rom芯片型号为m25p16。
21、优选的是,本发明的复位电路包括在电源输入端一侧放置了一个上拉电阻,利用轻触按键来实现复位,低电平有效。
22、本发明着重于对控制系统硬件、传感器、驱动元件进行设计创新与组合,公开了一种基于fpga的下肢外骨骼机器人关节驱动控制系统。对于驱动元件,目前常用的有电机驱动、气压驱动和液压驱动,本发明选用了电机驱动,因为相比于液压驱动和气压驱动,电机驱动控制模式简单,且控制精度易于保证,工作噪声小,质量轻,符合军用下肢外骨骼机器人的工作要求。电机安装于左右两腿的髋、膝关节处,另外考虑到下肢外骨骼机器人在紧凑型、小型化方面的要求,所以电机上已集成霍尔传感器和数字式增量编码器,对两者进行了组合;对于控制系统硬件主要包括主控装置和驱动连接装置,主控装置中的主控芯片选用了fpga芯片,因为在本发明的驱动控制系统中主控装置不仅要处理四路电机信号,而且还要通过编程的形式建立起底层算法环境和通信环境,这会消耗大量的i/o引脚和内存资源。此外,在实际生产中对于电机驱动控制其控制硬件通常采用的是单片机、dsp等,对于绝大多数模糊 pid 控制器(本发明采用的控制算法)也都是基于单片机来实现的。但是随着系统控制的不断复杂化,对于控制芯片也提出了更高的要求,例如数据计算速度要更快、可使用的储存资源要更大。而fpga芯片是伴随着超大规模集成电路技术发展而来的,与单片机stm等控制芯片相比具有集成度高、灵活性好、实时性强等优点,另外由于fpga的体系结构特别适用于并行预算的实现,所以利用fpga具有很高的实用价值。对于驱动连接装置主要的作用就是起中间连接作用,构建起连接渠道。在确定好控制系统硬件各原理图后,再通过altium designer软件进行pcb绘制。
23、
- 还没有人留言评论。精彩留言会获得点赞!