末端执行器的制作方法
1.本实用新型涉及工业机器人领域,更具体的说是末端执行器。
背景技术:
2.末端执行器指的是连接在工业机器人上用于实现不同功能的工具,能够通过更换不同的末端执行器从而使得机器人实现搬运、喷涂、清洁、焊接等多种功能,从而实现不同的自动化操作,在高压配电室控制柜进行倒闸时,由于操作过程具有一定危险性,故现在已经有采用工业机器人上连接用于倒闸的末端执行器,从而实现自动化倒闸操作,由于不同配电室中可能采用不同规格的按钮开关,故需要一种能够对不同规格的按钮开关进行按压的末端执行器。
技术实现要素:
3.本实用新型提供末端执行器,其有益效果为便于对规格不同的按钮开关进行按压倒闸。
4.末端执行器,包括连接壳、滑块、按压头和固定螺钉,连接壳内滑动连接有滑块,滑块上设置有两个螺纹孔,按压头上螺纹连接有两个固定螺钉,两个固定螺钉能够拧入两个螺纹孔内。
5.末端执行器,还包括电动推杆ⅰ,连接壳内固接有电动推杆ⅰ,滑块固接在电动推杆ⅰ的伸缩杆上。
6.末端执行器,还包括两个连接螺纹孔,连接壳上设置有两个连接螺纹孔。
附图说明
7.下面结合附图和具体实施方法对本实用新型做进一步详细的说明。
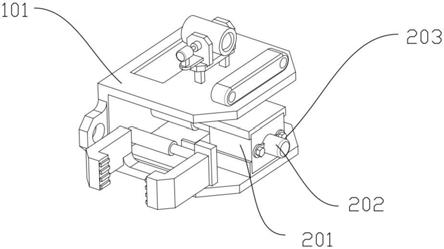
8.图1和图2为末端执行器的整体结构示意图;
9.图3和图4为连接壳的结构示意图;
10.图5为滑块的结构示意图;
11.图6为夹持部ⅱ的结构示意图;
12.图7为照明光源的结构示意图。
具体实施方式
13.参看图1-7,示出了按照本实用新型中对不同大小的按钮开关进行按压的实施例的示意图,进一步地,
14.本装置中包括固定螺钉203、滑块201、按压头202和连接壳101,滑块201内滑动连接有连接壳101,两个螺纹孔均设置在滑块201上,两个固定螺钉203均螺纹连接在按压头202上,两个螺纹孔内能够拧入两个固定螺钉203。
15.在使用本实用新型时,工作人员将连接壳101连接在七轴机械臂上,随后对七轴机
械臂进行程序编控,使得七轴机械臂能够自动带动连接壳101移动至合适位置,随后滑块201滑动,进而使得滑块201上的按压头202压在按钮开关上,进而完成配电室的倒闸操作,两个固定螺钉203的设置使得滑块201与按压头202可拆卸连接,进而工作人员可根据不同配电室按钮开关的不同规格,进而将大小不同的按压头202通过两个固定螺钉203连接在滑块201上,从而防止在按钮开关排放较密时,若是按压头202较大,则容易出现按压头202进行一次按压会对其他按钮进行误触的情况出现,若是按压头202过小,则容易出现按压头202对按钮开关进行按压时,造成按钮受力偏移进而在多次按动后按钮磨损的情况,故滑块201与按压头202可拆卸连接能够使得工作人员能够根据不同配电室的按钮规格不同,从而选取合适大小的按压头202,进而防止上述情况出现。
16.参看图5,示出了按照本实用新型中便于操作滑块201滑动的实施例的示意图,进一步地,
17.本实用新型中还包括电动推杆ⅰ204,电动推杆ⅰ204固定连接在连接壳101内,电动推杆ⅰ204的伸缩杆上固定连接有滑块201。
18.工作人员将将连接壳101连接在七轴机械臂上后,对电动推杆ⅰ204进行驱动连接,进而当七轴机械臂到达合适位置后,电动推杆ⅰ204伸出,进而使得滑块201伸缩,从而使得滑块201上的按压头202进行按压按钮开关操作。
19.参看图4,示出了按照本实用新型中便于将连接壳101安装在七轴机械臂上的实施例的示意图,进一步地,
20.本实用新型中还包括两个连接螺纹孔104,两个连接螺螺纹孔104均设置在连接壳101上。
21.工作人员在操作连接壳101放置在七轴机械臂上后,可通过向两个连接螺纹孔104内拧入螺钉的方式从而将连接壳101可拆卸连接在七轴机械臂上,进而实现七轴机械臂与连接壳101的可拆卸连接,使得工作人员在不需进行倒闸操作时,可将其他功能的末端执行器连接在七轴机械臂上,进而便于更换末端执行器。
22.参看图3,示出了按照本实用新型中便于新手操作人员识别不同末端执行器的实施例的示意图,进一步地,
23.本实用新型中还包括标记部102,标记部102设置在连接壳101上。
24.可在标记部102上记录本末端执行器功能与使用编号,进而使得新手操作人员能够根据标记部102上的信息准确识别目前工作任务需要使用的末端执行器,进而便于操作。
25.参看图3,示出了按照本实用新型中便于进行精准倒闸的实施例的示意图,进一步地,
26.本实用新型中还包括相机103,相机103设置在连接壳101上。
27.相机103能够跟随连接壳101同轨迹移动,进而使得在到达倒闸位置后,相机103可通过柜体上标志对七轴机械臂动作进行精确矫正,便于进行按压按钮开关操作。
28.参看图3,示出了按照本实用新型中便于相机103进行工作的实施例的示意图,进一步地,
29.本实用新型中还包括照明光源302和连接座301,连接壳101上固定连接有连接座301,连接座301上转动连接有照明光源302。
30.照明光源302能够对连接壳101前方进行照明处理,从而使得连接壳101前方光线
充足,进而便于相机103通过柜体上标志对七轴机械臂动作进行精确矫正的操作。
31.参看图3,示出了按照本实用新型中进一步便于相机103进行工作的实施例的示意图,进一步地,
32.本实用新型中还包括电机303,连接座301上固定连接有电机303,电机303的输出轴上固定连接有照明光源302。
33.电机303的输出轴转动可驱动照明光源302转动,进而使得照明光源302的照射角度可调节,进而进一步增加可调节的范围,使得照明光源302可根据实际使用环境进行不同角度的光线照射。
34.参看图6,示出了按照本实用新型中便于完成扳动转换开关的实施例的示意图,进一步地,
35.本实用新型中还包括夹持部ⅱ503和夹持部ⅰ501,连接壳101上滑动连接有夹持部ⅱ503,连接壳101上固定连接有夹持部ⅰ501。
36.操作七轴机械臂移动进而使得连接壳101移动至合适位置后,可操作夹持部ⅱ503滑动,进而使得夹持部ⅱ503与夹持部ⅰ501配合对转换开关进行夹持,随后再操作七轴机械臂移动即可使得夹持部ⅱ503与夹持部ⅰ501扳动转换开关,进一步便于完成倒闸工作。
37.参看图3、图6,示出了按照本实用新型中保护转换开关的实施例的示意图,进一步地,
38.本实用新型中还包括还包括胶条502,夹持部ⅰ501与夹持部ⅱ503上均设置有多个胶条502。
39.多个胶条502的设置能够使得对扳动开关夹持时缓冲夹持力,从而防止夹持力过大导致扳动开关损坏的情况出现。
40.参看图6,示出了按照本实用新型中便于操作夹持部ⅱ503移动的实施例的示意图,进一步地,
41.本实用新型中还包括电动推杆ⅱ504,连接壳101上固定连接有电动推杆ⅱ504,电动推杆ⅱ504的伸缩杆上固定连接有夹持部ⅱ503。
42.工作人员可通过操作电动推杆ⅱ504的伸缩杆收缩从而操作夹持部ⅱ503移动,进而使得夹持部ⅱ503与夹持部ⅰ501配合完成夹持操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1