一种适用于船舶堆舱的导轨式巡检机器人系统的制作方法
1.本实用新型属于船舶动力系统综合保障、核应急技术领域,更具体地,涉及一种适用于船舶堆舱的导轨式巡检机器人系统。
背景技术:
2.目前国内外已针对核电站机器人开展了不同程度的研究,然而,船舶堆舱环境与核电站安全壳存在较大差异,空间资源更加紧张、舱内环境更加恶劣、系统运行工况更加复杂。因此需要结合船舶堆舱特点及巡检需求,设计一种适用于船舶堆舱的机器人系统,实现堆舱巡检无人化;由于船舶堆舱空间资源有限,在实现机器人巡检功能的同时,需要尽可能降低机器人进入堆舱所占用的空间;此外,事故情况下,堆舱内环境更加复杂,舱内环境无法掌握,需要具有较强抗辐照性能的机器人进入堆舱,第一时间将舱内信息传输给舱外集控室采取相应措施,缓解事故后果,确保核安全。
技术实现要素:
3.针对现有技术的以上缺陷或改进需求,本实用新型提出了一种适用于船舶堆舱的导轨式巡检机器人系统,既可实现正常运行时状态监测任务,又可满足事故条件下舱内应急状态探测的任务。
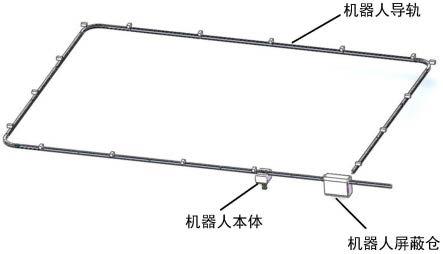
4.为实现上述目的,本实用新型提供了一种适用于船舶堆舱的导轨式巡检机器人系统,包括:机器人导轨、机器人本体及机器人屏蔽仓;
5.所述机器人导轨采用工字型轨道,沿着堆舱侧壁进行环形设置;
6.所述机器人本体吊装在导轨下方,所述机器人本体包括:移动机构、多源传感器、数据临时存储系统及运动控制系统组成,所述移动机构用于带动所述机器人本体在所述机器人导轨上移动,所述多源传感器的传感器信号输出端与所述数据临时存储系统连接,以通过所述数据临时存储系统进行存储,所述运动控制系统用于为所述机器人本体提供运动源;
7.所述机器人屏蔽仓具有机器人屏蔽防护功能,供所述机器人本体在巡检结束后进入。
8.在一些可选的实施方案中,所述机器人导轨的轨道材料选用不锈钢,且所述机器人导轨安装在堆舱某层或每层内壁上,以实现对某层或每层设备的巡检及探测任务。
9.在一些可选的实施方案中,所述机器人导轨采取侧挂式安装方式,通过安装支架与堆舱侧壁连接。
10.在一些可选的实施方案中,所述多源传感器包括视频传感器、温湿度传感器、核辐射探测器、烟雾传感器及超声波传感器,其中,所述视频传感器抗辐照水平不低于106rad/h,所述核辐射探测器采用电离室探测器。
11.在一些可选的实施方案中,所述运动控制系统选择伺服电机作为所述机器人本体的动力源,并采用基于粒子滤波和地图匹配的定位方法对所述机器人本体进行定位。
12.在一些可选的实施方案中,由所述机器人导轨的某个位置引出一路通往所述机器人屏蔽仓。
13.在一些可选的实施方案中,所述机器人屏蔽仓的材料选取聚合物基复合屏蔽材料。
14.在一些可选的实施方案中,所述机器人屏蔽仓设置有电动感应门,以实现所述机器人本体的进出及有效的辐射屏蔽。
15.在一些可选的实施方案中,所述机器人屏蔽仓设置有数据传输接口,以实现所述机器人本体中的数据临时存储系统与后台数据管理中心的连接。
16.在一些可选的实施方案中,所述机器人屏蔽仓设置有充电接口,对所述机器人本体进行充电。
17.总体而言,通过本实用新型所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
18.(1)提出适用于船舶堆舱高温高湿、高辐照等复杂环境的机器人,实现堆舱巡检无人化,尽可能减少人员进入堆舱的时间;
19.(2)针对堆舱内空间资源有限的情况,提出导轨式机器人的方案,可不影响舱内主要设备的布置,将机器人对堆舱维修空间的影响最小化;
20.(3)相比于传统履带式移动机器人,提出的导轨式机器人无须具备越障的能力,将机器人设计精简化;
21.(4)机器人屏蔽仓可最大程度减少机器人摄像头、传感器暴露在高辐射剂量场的时间,提高机器人使用寿命;
22.(5)机器人设置有数据临时存储系统,通过机器人屏蔽仓内的数据接口可将舱内信息及数据及时传输至舱外监控中心;
23.(6)事故情况下,堆舱内环境更加复杂。本实用新型机器人系统可第一时间探清舱内情况,将信息传递给操控人员采取相关措施,缓解事故后果,确保核安全;
24.(7)导轨式机器人可实现堆舱内360
°
探测,解决堆舱内监控盲区或死角问题。
附图说明
25.图1是本实用新型实施例提供的一种适用于船舶堆舱的导轨式巡检机器人系统结构示意图。
具体实施方式
26.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
27.本实用新型提供了一种适用于船舶堆舱的导轨式巡检机器人系统,其应用的环境为船舶堆舱。
28.本实用新型提供的导轨式巡检机器人系统由机器人导轨、机器人本体、机器人屏蔽仓等三大部分组成,以下进行详细说明。
29.(1)机器人导轨
30.如图1所示,机器人导轨作为机器人在舱内巡检的平台及轨道,沿着堆舱侧壁安装在堆舱内壁上。典型船舶堆舱一般进行分层,每层可铺设铺板、格栅等结构方便操作人员维修。机器人导轨可安装在堆舱某层或每层(如有需要),实现对某层或每层设备的巡检及探测任务。
31.轨道材料选用不锈钢,因其耐高温、耐氧化、耐辐照,具备良好的机械性能及热膨胀性能。
32.轨道截面选用工字型轨道,工字型导轨所承受的弯矩较大,且工字型轨道的截面形状和空间分布符合实际环境的应用,整体重量较轻。
33.轨道采取侧挂式安装方式,可实现堆舱无死角监测,通过安装支架与堆舱侧壁连接。可根据舱内设备布置情况及舱内空间等设计轨道尺寸,尽量减少轨道占用舱内的空间,确保维修性。
34.机器人本体吊装在导轨下方,不占用舱内横向空间。
35.(2)机器人本体
36.机器人本体是实现堆舱内状态监测的移动载体与核心装置。
37.机器人本体由移动机构、多源传感器、数据临时存储系统、运动控制系统组成。
38.机器人移动机构负责带动所述机器人本体在所述机器人导轨上移动。
39.机器人多源传感器主要包括视频传感器、温湿度传感器、核辐射探测器等。其中视频传感器抗辐照水平可达106rad/h,满足系统在正常运行工况及短期事故工况下舱内的辐照环境;核辐射探测器采用抗辐照能力强的电离室探测器。
40.机器人数据临时存储系统将舱内巡检过程中的各类数据进行临时存储,待巡检结束后回到机器人屏蔽仓内将数据传输至后台。
41.机器人运动控制系统选择伺服电机作为机器人的动力源,并采用基于粒子滤波和地图匹配的定位方法对机器人进行定位。
42.(3)机器人屏蔽仓
43.机器人屏蔽仓是机器人在巡检结束进入的特定装置。
44.由机器人环形导轨某个位置引出一路通往机器人屏蔽仓,引出的支路及其具体布置位置可根据舱内实际布置情况进行设计,图1给出了屏蔽仓位于环形导轨一个角落的示意。
45.机器人屏蔽仓作为机器人启停和数据传输的辐射防护区域,降低机器人暴露在堆舱辐射环境的时间,大大降低机器人所受辐照剂量率水平,延长机器人使用寿命。
46.机器人屏蔽仓材料选取易成形、高强度、抗辐照的聚合物基复合屏蔽材料,聚合物作为基体主要承担对舱内中子的屏蔽,复合材料中添加铅、钨等金属成分承担对舱内γ射线的屏蔽。
47.机器人屏蔽仓设置有电动感应门,可实现机器人的进出及有效的辐射屏蔽。机器人运动到感应门时,能够通过感应系统自动打开门感应门;机器人进入到防护装置后,感应门能够自动关闭。
48.机器人屏蔽仓设置有数据传输接口,可实现机器人数据临时存储系统与后台数据管理中心的连接。
49.机器人屏蔽仓设置有充电接口,机器人在该装置内可及时进行充电。
50.机器人屏蔽仓内的所有能源供应及数据传输通过有线的方式经过堆舱贯穿件通道堆舱外。
51.本实用新型的导轨式巡检机器人系统的工作方式为:
52.1、船舶动力系统正常运行时,按照计划性维修任务,明确机器人巡检周期;
53.2、机器人按照制定好的周期开展巡检任务,机器人屏蔽仓打开屏蔽门,机器人从屏蔽仓进入环形导轨,沿着导轨开展巡检任务;
54.3、巡检过程中,在重点关注的区域实施舱内环境探测任务,并将数据存储至机器人自带的数据临时存储系统;
55.4、在巡检任务完成后,机器人沿着轨道返回机器人屏蔽仓中,通过数据传输接口将数据及时传送至舱外集控室;若需要,可对机器人进行充电;
56.5、在事故情况下,舱外集控室传递应急信号至机器人屏蔽仓中,派出机器人进入轨道进行舱内环境应急探测任务。
57.任务完成后,机器人在机器人屏蔽仓内等待下一次作业。
58.需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,以实现本实用新型的目的。
59.本领域的技术人员容易理解,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1