用于拾取壳状牙齿矫治器压膜组件的夹具组件和机器人的制作方法
1.本实用新型涉及牙齿矫治器制造技术领域,特别涉及用于拾取壳状牙齿矫治器压膜组件的夹具组件和机器人。
背景技术:
2.目前,在壳状牙齿矫治器压膜组件的加工制造过程中,通常需要经过牙颌模型3d打印、备膜、压膜、壳状牙齿矫治器切割、清洗等工序。现有的壳状牙齿矫治器压膜组件切割大多采用手动切割,但由于手动切割效率较低,目前有向自动化切割发展的趋势。主流的一种自动化切割方案是,通过固定激光器作为切割工具,机器人通过夹具组件吸取压膜组件,然后通过视觉系统进行信息识别和定位,随后机器人带动压膜组件按预设切割路径沿齿模牙龈线进行切割,最终得到壳状牙齿矫治器成品。
3.但目前的夹具组件安装多个吸盘,每个吸盘通过单独气管与外部气路相连,导致夹具组件的整体高度和宽度较大,易导致夹具组件与机器人出现碰撞,或出现运动死点;且气路布置散乱,由于夹具组件涉及复杂的旋转和偏移运动,容易导致出现气路干涉。
技术实现要素:
4.本实用新型的目的在于提供一种用于拾取壳状牙齿矫治器压膜组件的夹具组件和机器人,不仅能够减小夹具组件的高度和宽度,避免夹具与机器人出现碰撞,或出现运动死点,同时避免气路干涉。
5.为解决上述技术问题,本实用新型的实施方式提供了一种用于拾取壳状牙齿矫治器压膜组件的夹具组件,包括连接盘、固定于所述连接盘一侧的透光支撑板、设于所述连接盘和所述透光支撑板之间的光源;所述连接盘内设置有气道,吸盘贯穿所述透光支撑板固定于所述连接盘,且所述吸盘连通所述气道。
6.本实用新型实施方式提供了一种用于拾取壳状牙齿矫治器压膜组件的夹具组件,包括连接盘、固定于连接盘一侧的透光支撑板、设于连接盘和透光支撑板之间的光源;连接盘内设置有气道,吸盘贯穿透光支撑板固定于连接盘,且吸盘连通气道。本实施例中连接盘内设置有气道,吸盘贯穿透光支撑板固定于连接盘,且吸盘直接连通气道,无需借助单独气管连接外部气路,可减小夹具组件的高度和宽度,避免夹具组件与机器人出现碰撞,或出现运动死点;同时还能够避免气路干涉。且本实施例中设于连接盘和透光支撑板之间的光源可透过透光支撑板为被吸盘吸附的待测物料提供准确光照。
7.另外,所述连接盘上设有凹槽,所述凹槽的开口贯穿所述连接盘朝向所述透光支撑板的表面,所述光源设于所述凹槽内;所述气道垂直于所述连接盘的方向上的正投影环绕所述凹槽垂直于所述连接盘的方向上的正投影。
8.另外,所述夹具组件还包括:设于所述连接盘和所述透光支撑板之间的垫块;所述凹槽至少包括相对设置的两个侧壁,至少一个所述侧壁朝向所述透光支撑板的表面固定有所述垫块。
9.另外,所述透光支撑板上设有定位孔,所述垫块上设有定位销,所述定位销位于所述定位孔内。
10.另外,所述连接盘上还设有与所述凹槽连通的开口,所述开口贯穿所述凹槽侧壁,所述开口处设有压片;所述开口用于容置所述光源的外接线束,所述压片用于固定所述外接线束。
11.另外,所述气道包括四个子气道,所述四个子气道首尾相接形成闭环气道。
12.另外,所述连接盘上开设有四个均连通所述气道的加工孔,且四个所述加工孔分别位于所述四个子气道的不同首尾相接的角位置处,每个所述加工孔内均设有密封件。
13.另外,所述连接盘的一个侧面还设有连通所述气道的通气孔,所述通气孔用于连接气管接头。
14.另外,包括至少两个所述吸盘,在对待拾取的所述壳状牙齿矫治器压膜组件进行拾取时,至少两个所述吸盘位于待拾取的所述壳状牙齿矫治器压膜组件的信息标识码的区域外。
15.另外,所述夹具组件还包括夹具护罩;所述夹具护罩包括:与所述连接盘背离所述透光支撑板表面固定连接的固定部,以及与所述固定部连接、且朝背离所述透光支撑板方向延伸的筒状护套部,所述护套部的开口背离所述透光支撑板。
16.另外,其特征在于,所述连接盘上设有凹槽,所述凹槽的开口贯穿所述连接盘朝向所述透光支撑板的表面,所述光源设于所述凹槽内;所述凹槽底部设有螺杆,所述螺杆贯穿所述连接盘且位于所述筒状护套部内。
17.本实用新型的实施方式提供了一种机器人,包括机械臂,所述机械臂自由端的末端固定有如上述的用于拾取壳状牙齿矫治器的压膜组件的夹具组件。
附图说明
18.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,显而易见地,下面所描述的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据附图获得其他的附图。
19.图1是本实用新型中壳状牙齿矫治器压膜组件的结构示意图;
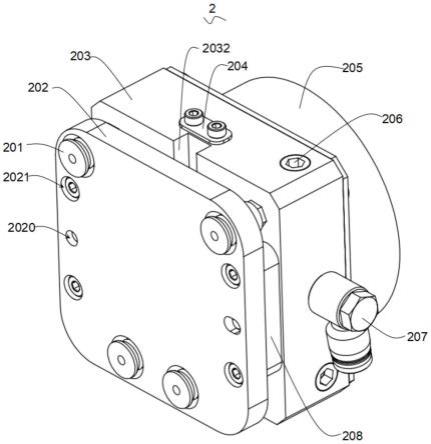
20.图2是本实用新型中夹具组件的立体结构示意图;
21.图3是本实用新型中夹具组件取掉透光支撑板后的立体结构示意图;
22.图4是本实用新型中如图2所示夹具组件的剖面图;
23.图5是本实用新型中如图2所示夹具组件中连接盘的截面图;
24.图6是本实用新型中如图2所示夹具组件背面的立体结构示意图;
25.图7是本实用新型中机器人的立体结构示意图。
具体实施方式
26.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合附图对本技术的各实施例进行详细的阐述。然而,本领域的普通技术人员可以理解,在本技术各实施例中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和
基于以下各实施例的种种变化和修改,也可以实现本技术所要求保护的技术方案。以下各个实施例的划分是为了描述方便,不应对本技术的具体实现方式构成任何限定,各个实施例在不矛盾的前提下可以相互结合相互引用。
27.在本技术的描述中,需要说明的是,除非另有说明,“多个”的含义是两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。“垂直”并不是严格意义上的垂直,而是在误差允许范围之内。“平行”并不是严格意义上的平行,而是在误差允许范围之内。
28.下述描述中出现的方位词均为图中示出的方向,并不是对本技术的具体结构进行限定。在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可视具体情况理解上述术语在本技术中的具体含义。
29.参见附图1至附图7,本实用新型的实施例涉及一种用于拾取壳状牙齿矫治器压膜组件1 的夹具组件2,本实施例的核心在于包括连接盘203、固定于连接盘203一侧的透光支撑板 202、设于连接盘203和透光支撑板202之间的光源209;连接盘203内设置有气道2030,吸盘201贯穿透光支撑板202固定于连接盘203,且吸盘201连通气道2030。
30.本实施例提供了一种用于拾取壳状牙齿矫治器压膜组件1的夹具组件2,连接盘203内设置有气道2030,吸盘201贯穿透光支撑板202固定于连接盘203,且吸盘201直接连通气道2030,无需借助单独气管连接外部气路,可减小夹具组件2的高度和宽度,避免夹具组件 2与机器人出现碰撞,或出现运动死点;同时还能够避免气路干涉。且本实施例中设于连接盘203和透光支撑板202之间的光源209可透过透光支撑板202为被吸盘201所拾取的待测物料(例如壳状牙齿矫治器压膜组件1)提供准确光照。
31.下面对本实施例的用于拾取壳状牙齿矫治器压膜组件1的夹具组件2的实现细节进行具体的说明,以下内容仅为方便理解提供的实现细节,并非实施本方案的必须。
32.本实施例中提供了一种用于拾取壳状牙齿矫治器压膜组件1的夹具组件2,以下实施例中简称为夹具组件2。本实施例的夹具组件2用于拾取壳状牙齿矫治器压膜组件1,如图1所示,壳状牙齿矫治器压膜组件1作为待切割的生产转移物料,包括成型膜片101和齿模102。其中,齿模102上设置有信息块103,信息块103上打印有信息码,用于供视觉系统识别壳状牙齿矫治器压膜组件1的相关信息,相关信息例如进行切割时的切割路径信息、患者的信息等。
33.请一并参见图2、图3和图4,本实施例中夹具组件2包括吸盘201、透光支撑板202、连接盘203和光源209。连接盘203作为夹具组件2的装配基体,用于承载夹具组件2的各零部件,同时与机器人连接,由机器人带动夹具组件2动作。透光支撑板202固定于连接盘 203一侧,光源209设于连接盘203和透光支撑板202之间。其中,透光支撑板202可选用高透光材料,以便光源209发出的光线可透过透光支撑板202照射到吸盘201吸取的壳状牙齿矫治器压膜组件1上,为壳状牙齿矫治器压膜组件1提供光照,以便于视觉识别系统对壳状牙齿矫治器压膜组件1进行物料信息的识别。
34.可实现地,透光支撑板202上设有避让孔(附图未示出),吸盘201穿过避让孔固定于连接盘203上,吸盘201在未收缩状态下,暴露出透光支撑板202的表面第一距离,且第一距离小于吸盘201的收缩量。也就是说,当吸取壳状牙齿矫治器压膜组件1时,吸盘201收缩于透光支撑板202的避让孔内,壳状牙齿矫治器压膜组件1的成型膜片101背离齿模102的一面紧贴于透光支撑板202上,从而便于后续切割工艺的有效进行。其中,吸盘201可采用多层吸盘。
35.在一个例子中,请一并参见图3和图5,连接盘203上设有凹槽2031,凹槽2031的开口贯穿连接盘203朝向透光支撑板202的表面,光源209设于凹槽2031内;气道2030垂直于连接盘203的方向上的正投影环绕凹槽2031垂直于连接盘203的方向上的正投影。本实施例中连接盘203上设置用于容置光源209的凹槽2031,且凹槽2031的开口朝向透光支撑板202 设置,如此,位于连接盘203凹槽2031内的光源209发出的光可穿过透光支撑板202照射到吸盘201吸取的壳状牙齿矫治器压膜组件1上,为壳状牙齿矫治器压膜组件1提供光照,以便于视觉识别系统对壳状牙齿矫治器压膜组件1进行物料信息的识别。且由于气道2030垂直于连接盘203的方向上的正投影环绕凹槽2031垂直于连接盘203的方向上的正投影,如此,避免了气道2030和光源209之间产生干扰。
36.在实际应用中,气道2030和用于容置光源209的凹槽2031的位置关系不以此为限,只要气道2030和光源209之间不产生干扰的位置关系均在本实施例的保护范围之内,例如:光源209设置于气道2030垂直于连接盘203的方向上的正投影外围。
37.可选地,凹槽2031可位于连接盘203的中心位置处,也就是说,光源209也位于连接盘 203的中心位置处,由于壳状牙齿矫治器压膜组件1上信息块103位于齿模102中间、且位于成型膜片101的中间位置处,因此,光源209能够为吸盘201吸取的壳状牙齿矫治器压膜组件1上的信息块103提供准确光照。
38.在另一个例子中,请一并参见图2和图3,夹具组件2还包括:设于连接盘203和透光支撑板202之间的垫块208;凹槽2031至少包括相对设置的两个侧壁,至少一个侧壁朝向透光支撑板202的表面固定有垫块208。
39.本实施例中在连接盘203和透光支撑板202之间增加垫块208,可提高透光支撑板202 的支撑强度。可选地,可在凹槽2031的一个侧壁朝向透光支撑板202的表面上固定垫块208,也可在凹槽2031相对的两个侧壁上分别设置一个垫块208,两个侧壁中每个侧壁朝向透光支撑板202的表面上固定一个垫块208,从而为透光支撑板202提供均匀的支撑力。
40.可实现地,为匹配不同尺寸的吸盘201,可设置不同厚度的垫块208与透光支撑板202 配合,使吸盘201在未收缩状态下露出透光支撑板202第一距离,且第一距离小于吸盘201 的收缩量,如此,当吸取壳状牙齿矫治器压膜组件1时,吸盘201收缩于透光支撑板202的避让孔内,壳状牙齿矫治器压膜组件1的成型膜片101背离齿模102的一面紧贴于透光支撑板202上。
41.在另一个例子中,请一并参见图2和图3,透光支撑板202上设有定位孔2020,垫块208 上设有定位销210,定位销210位于定位孔2020内。本实施例中垫块208上的定位销210位于透光支撑板202的定位孔2020内,以实现透光支撑板202与连接盘203的定位。需要说明的是,定位孔2020可设有2个及2个以上,定位销210也可设有2个及2个以上,1个定位销210位于1个定位孔2020内。附图2和附图3中,以定位孔2020和定位销210均为2个进行示例说
明。
42.可实现地,在一些例子中,若连接盘203和透光支撑板202之间未设置有垫块208,则可将定位销210直接固定于连接盘203凹槽2031的侧壁上,连接盘203上的定位销210与透光支撑板202上的定位孔2020配合共同实现定位。
43.请一并参见图2和图3,在另一例子中,透光支撑板202上设有多个第一固定孔2021,连接盘203上设有多个第二固定孔(附图未示出),第一固定孔2021和第二固定孔一一对应设置。夹具组件2还包括多个固定销211,每个固定销211贯穿1个第一固定孔2021、且位于对应该第一固定孔2021的第二固定孔内,从而将透光支撑板202固定于连接盘203上。其中,第一固定孔2021为通孔,第二固定孔为盲孔。
44.若连接盘203和透光支撑板202之间设置有垫块208,垫块208上还设置有多个第三固定孔(附图未示出),第三固定孔为通孔,1个第三固定孔与1个第一固定孔2021和1个第二固定孔对应,每个固定销211贯穿1个第一固定孔2021和1个第三固定孔、且位于对应该第一固定孔2021的第二固定孔内,从而将透光支撑板202、垫块208和连接盘203三者固定在一起。
45.在另一些例子中,请一并参见图2和图3,连接盘203上还设有与凹槽2031连通的开口 2032,开口2032贯穿凹槽2031侧壁,开口2032处设有压片204;开口2032用于容置光源 209的外接线束,压片204用于固定外接线束。本实施例中凹槽2031用于容置光源209,光源209的外接线束可位于与凹槽2031连通的开口2032内,且被开口2032处的压片204压覆固定,压片204可通过螺栓固定在连接盘203上,如此,在夹具组件2使用过程中光源209 的外接线束能够保持固定,从而避免线束缠绕。
46.在另一些例子中,参见图5,气道2030包括四个子气道,四个子气道首尾相接形成闭环气道。本实施例中的气道2030为闭环气道,由四个子气道首尾相接所形成,如此,只需在一个子气道上开设孔洞即可为整个气道2030充气或抽取整个气道2030的气体,对于子气道的形状,在一种具体实施中,子气道可以是如图5所示的直气道,在另一种具体实施中,子气道也可以包括至少一个弯曲的气道,在此不一一列举。在另外一些例子中,气道2030所包括的子气道也可以是2个、3个等,可以根据实际设置的需求进行选择,在此不一一例举。
47.可实现地,请一并参见图3、图5和图6,连接盘203上开设有4个均连通气道2030的加工孔(加工孔21、加工孔22、加工孔23和加工孔24),且4个加工孔分别位于4个子气道的不同首尾相接的角位置处,每个加工孔内均设有密封件206。本实施例中4个加工孔分别位于4个子气道的不同首尾相接的角位置处,加工孔为在连接盘203内加工气道2030所形成的孔洞,在每个加工孔内均设有密封件206,从而避免气道2030漏气。可选地,密封件206 可以为密封塞、密封阀、螺塞等,只要能够起到密封气道2030的作用即可。在附图2、附图 3和附图6中,采用螺塞作为密封件206,通过密封锥孔安装在连接盘203上。
48.可选地,请一并参见图2、图3、图5和图6,连接盘203的一个侧面还设有连通气道2030 的通气孔25,通气孔25用于连接气管接头207。本实施例中通气孔25与气道2030连通,气管接头207一端连接在连接盘203的通气孔25上,另一端连接气管作为夹具组件2的气路接口。本实施例中只通过一个通气孔25与气管接头207连接,气路简单规整。可选地,气管接头207采用l形旋转气管接头,保证在夹具组件2使用过程中自由旋转时,不会出现气管干涉。具体地说,该通气孔25可为加工孔中的其中一个,如此,无需额外在连接盘203上开设孔
洞,降低了夹具组件2的制备工艺复杂度。
49.在另一些例子中,请参见图6,夹具组件2还包括夹具护罩205;夹具护罩205包括:与连接盘203背离透光支撑板202表面固定连接的固定部2051,以及与固定部2051连接、且朝背离透光支撑板202方向延伸的筒状护套部2052,筒状护套部2052的开口背离透光支撑板202。本实施例中夹具护罩205的固定部2051固定在连接盘203背离透光支撑板202表面上,夹具组件2与机器人的机械臂连接时,夹具护罩205的筒状护套部2052套设于机械臂自由端的末端,从而遮挡住夹具组件2与机械臂的连接间隙,避免在夹具组件2使用过程中自由旋转时,线束卡在夹具组件2与机械臂的连接间隙内。
50.可实现地,请一并参见图4和图6,连接盘203上设有凹槽2031,凹槽2031的开口贯穿连接盘203朝向透光支撑板202的表面,光源209设于凹槽2031内;凹槽2031底部设有螺杆212,螺杆212贯穿连接盘203且位于筒状护套部2052内。本实施例中在连接盘203的凹槽2031底部设置贯穿连接盘203的螺杆212,螺杆212位于筒状护套部2052内用于与机器人的机械臂连接。
51.可实现地,请一并参见图2和图3,夹具组件2包括至少两个吸盘201,在对待拾取的壳状牙齿矫治器压膜组件1进行拾取时,至少两个吸盘201位于待拾取的壳状牙齿矫治器压膜组件1的信息标识码的区域外。本实施例中夹具组件2包括至少两个吸盘201,夹具组件2 在拾取壳状牙齿矫治器压膜组件1时,至少两个吸盘201位于壳状牙齿矫治器压膜组件1的信息标识码的区域外,从而避免遮挡壳状牙齿矫治器压膜组件1的信息标识码的区域,而导致光源209发出的光线无法照射到壳状牙齿矫治器压膜组件1的信息标识码的区域,从而避免影响到视觉识别系统对壳状牙齿矫治器压膜组件1的信息识别。在附图2和附图3中,夹具组件2包括4个吸盘201,两两吸盘201分别位于透光支撑板202的相对两侧,其中两个吸盘201的间距较大,用于对壳状牙齿矫治器压膜组件1上齿模前牙区所在区域进行拾取,另外两个吸盘201的间距较小,用于对壳状牙齿矫治器压膜组件1上齿模后牙区所在区域进行拾取,在避免影响到视觉识别系统对壳状牙齿矫治器压膜组件1的信息识别的同时可以对壳状牙齿矫治器压膜组件1进行稳定拾取。
52.本实用新型的实施方式提供了一种机器人,如图7所示,包括机械臂3,机械臂3自由端的末端固定有如上述的用于拾取壳状牙齿矫治器的壳状牙齿矫治器压膜组件1的夹具组件 2。机械臂3作为动力组件,带动夹具组件2进行运动,实现对壳状牙齿矫治器压膜组件1的吸取等。
53.本实施例中机器人主要用于壳状牙齿矫治器压膜组件1的自动切割过程中,可实现壳状牙齿矫治器压膜组件1的拾取,本实施例中机器人的工作过程如下:(1)机械臂3带着夹具组件2运行至吸取位;(2)夹具组件2上的吸盘201工作,吸取壳状牙齿矫治器压膜组件1; (3)机械臂3带着夹具组件2运行至视觉识别位;(4)夹具组件2上光源209工作亮起,与视觉识别系统一起对壳状牙齿矫治器压膜组件1进行视觉识别和定位;(5)机械臂3带着夹具组件2运动至激光切割位,激光切割装置根据设定路径对壳状牙齿矫治器压膜组件1上的成型膜片101进行切割。至此,完成一个壳状牙齿矫治器压膜组件1的夹持转移和切割工作。当然在实际应用中,本实施例中的机器人也可用于拾取其他物料,本实施例中不一一进行说明。
54.本实施机器人还包括双排弹簧管4,双排弹簧管4结构简单,一路通气路,一路通电
路,实现夹具组件2与机械臂3的电路和气路连接,从而降低整体结构的复杂程度。
55.双排弹簧管4中的一根管路内为气管,气管的一端连接夹具组件2的气管接头,另一端与机器人上的气路接口连接;另一根管路内为光源的外接线束,光源的外接线束一端与夹具组件2上的光源连接,另一端与机器人上的电气接口连接。
56.本实施例中双排弹簧管4中两根管路的外部绝缘层连接在一起,从而保证在夹具组件2 使用过程中自由旋转时,不会出现气管干涉。
57.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1