一种可开合机器人躯体及主体的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种可开合机器人躯体及主体。
背景技术:
2.随着机器人技术的高速发展,仿生机器人作为其细分类别在教育,科研,军事等领域发挥着重要的作用。仿生机器人以自然界生物运动方式,思维方式等做借鉴,对其进行局部或整体进行仿真,然后通过机器人的方式得以呈现。而四足机器人是以四足动物为模板,对其运动方式进行仿真;现有的四足机器人,虽然同为仿真机器人,但通常不具备功能模块拓展的能力,或功能模块拓展只局限在几类特定的类型。显示装置也仅有少部分机器人才具备。
3.通常设计人员会尽可能的将功能模块全部融入到机器人本体中,但这样的做法与消费者自身的需求是存在差异的。功能模块的增加势必导致机器人成本居高不下,价格不利于普通消费者,也不利于普通消费者对产品进行个性化配置以及对功能模块进行搭载及开发,测试。传统的功能模块通常采取一次固定的方式,相应的机械结构进行适配,但这样的方式不利于用户对于产品进行改装,限制了用户的个性化需求。传统的机器人内部打开方式,多采用紧固件进行固定,不利于频繁的对机器人进行改造升级。
技术实现要素:
4.针对上述技术问题,本实用新型一方面的目的在于提供一种可开合机器人躯体,可以在不借助外部工具的情况下,能够快速对机器人内部进行查看;本实用新型的另一个目的在于提供一种包含该躯体的一种可开合机器人主体。
5.为了解决上述技术问题,本实用新型采用的技术方案为:
6.一种可开合机器人躯体,包括腹甲、前甲和后甲,所述前甲与腹甲的前端固定联接,后甲与腹甲的后端铰接;前甲与后甲之间设有胸甲,胸甲与腹甲可拆卸联接。
7.所述胸甲通过磁铁与腹甲可拆卸联接;所述后甲通过快拆螺丝与胸甲或腹甲可拆卸连接。
8.所述胸甲两侧分别设有上连接磁铁,腹甲两侧分别设有与上连接磁铁联接的下连接磁铁;所述胸甲的两侧均固定有与上连接磁铁联接的上连接座,腹甲的两侧均固定有与下连接磁铁联接的下连接座。
9.所述上连接座上凹槽,上连接磁铁嵌入凹槽内,下连接座上设有与凹槽相配合的凸起,下连接磁铁嵌入凸起内。
10.所述胸甲和后甲上均设有散热孔;所述后甲上设有开口,开口出设有遮挡板,通过遮挡板遮挡开口,遮挡板与后甲固定联接;所述腹甲上固定有用于分割空间的挡板。
11.所述胸甲与后甲之间设有背甲,所述背甲与腹甲的侧边铰接。
12.所述背甲设有两个,两个背甲相对设置;所述胸甲和背甲上均设有散热孔;所述背甲通过快拆螺丝与腹甲可拆卸连接。
13.还包括显示器支架,所述显示器支架固定在前甲的前端。
14.所述显示器支架倾斜设置。
15.一种可开合机器人主体,包括腿部机构和可开合机器人躯体;所述腿部机构设有多个,各腿部机构均与可开合机器人躯体联接;各腿部机构均包括肩甲、大腿和小腿,所述大腿与小腿之间、大腿与肩甲之间以及肩甲与可开合机器人躯体之间均设有双轴舵机。
16.本实用新型与现有技术相比,具有的有益效果是:
17.后甲与腹甲的后端铰接,胸甲与腹甲可拆卸联接;通过开启后甲和/或将胸甲拆卸,可以使其在不借助外部工具的情况下,能够快速对机器人内部进行查看,问题处理等,并在后甲进行大尺寸孔位和固定螺纹孔设计,在后期进行功能拓展时,用于机械臂,储物舱,云台等结构的固定和走线,使其在具备功能拓展能力的同时,能更加方便的对传感器等模块进行拆装、走线和更换等。可广泛应用于学生、科研工作者、工程师等群体对于产品开发,测试,功能拓展等环节。以及普通消费者对于电子产品功能个性化搭载。
18.胸甲通过磁铁与腹甲可拆卸联接,即通过磁力吸附的方式实现联接,这样方便实现安装与分离。设有散热孔可以利于躯体内的部件散热。
19.通过设置背甲,可以增大开启程度,可以更加便于对内部进行查看。
20.通过合理的结构设计使其具有广泛的拓展功能,以便于后期消费者对于产品功能进行拓展,增加整个产品的可开发空间,并降低消费者的购置成本,当显示装置升级为触摸屏时,可以有效减少按钮等元器件的使用。而机器人本身作为仿真四足机器人,在应对复杂环境下的机动能力,明显优于传统的轮式及履带机器人,具备较高的应用潜力。
附图说明
21.图1是本实用新型实施例一的主视图;
22.图2是本实用新型实施例一的剖视图;
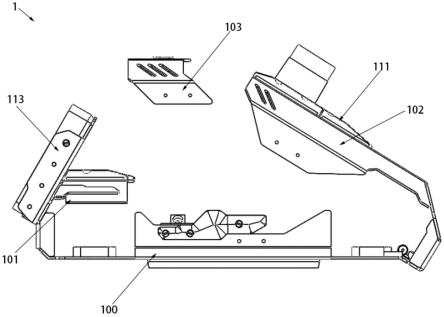
23.图3是本实用新型实施例一一个方向的轴测图;
24.图4是本实用新型实施例一另一个方向的轴测图;
25.图5是本实用新型实施例一胸甲与腹甲联接结构示意图;
26.图6是本实用新型后甲的结构示意图;
27.图7是本实用新型挡板的结构示意图;
28.图8是本实用新型实施例二的结构示意图;
29.图9是本实用新型实施例三的一种整体结构的轴测图;
30.图10是本实用新型实施例三的另一种整体结构的轴测图;
31.图11是本实用新型腿部机构的结构示意图;
32.图12是本实用新型腿部机构的爆炸图;
33.图13是本实用新型双轴舵机的联接状态示意图;
34.图14是本实用新型双轴舵机的结构示意图;
35.其中:1为可开合机器人躯体,100为腹甲,101为前甲,102为后甲,103为胸甲,104为上连接磁铁,105为下连接磁铁,106为上连接座,107为下连接座,108为凹槽,109为凸起,110为背甲,111为遮挡板,112为开口,113为显示器支架,114为挡板;
36.2为可开合机器人主体,200为腿部机构,201为肩甲,202为大腿,203为小腿,204为
双轴舵机,205为虚轴,206为固定圆盘,207为实轴,208为舵盘,209为舵机固定面板。
具体实施方式
37.下面对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
38.实施例一
39.如图1至7所示,一种可开合机器人躯体,包括腹甲100、前甲101、后甲102和胸甲103;腹甲100、前甲101、后甲102和胸甲103之间联接后可以形成容纳元器件的空间。其中:前甲101与腹甲100的前端固定联接,后甲102与腹甲100的后端铰接;胸甲103设置在前甲101与后甲102之间,胸甲103与腹甲100可拆卸联接。
40.通过拆掉胸甲103或者开启后甲102,在进行教学等任务时,可以直观展示内部结构,也更容易替换内部元器件。
41.具体的,大容量的机身内部空间,可将语音识别模块,主控模块,电源模块等实现内置,并保留充裕的内部拓展空间。
42.进一步,可以采用多种结构实现胸甲103与腹甲100的可拆卸联接,优选通过磁铁吸附的方式实现两者的联接。
43.进一步,具体采用以下结构设置安装磁铁:
44.在胸甲103的两侧固定有上连接座106,上连接座106上固定联接有上连接磁铁104;在腹甲100的两侧设有相对应的下连接座107,下连接座107上固定联接有下连接磁铁105。当胸甲103与腹甲100联接时,上连接磁铁104与下连接磁铁105吸合,从而实现胸甲103与腹甲100的联接。
45.进一步,上连接座106上凹槽108,上连接磁铁104嵌入凹槽108内,下连接座107上设有与凹槽108相配合的凸起,下连接磁铁105嵌入凸起内。
46.进一步,后甲102通过快拆螺丝与胸甲103或腹甲100可拆卸连接;胸甲103或腹甲100上设有相应的螺孔。
47.当需要开启后甲102时,需要先旋松快拆螺丝,之后方能开启;快拆螺丝的顶部可以设置成一字、十字、内六角等形状用于背甲开启,防止手拧无法旋松时。
48.进一步,为了提高整体的散热性能,在胸甲103和后甲102上均设有散热孔。
49.进一步,后甲102上设有开口112,开口112出设有遮挡板111,通过遮挡板111遮挡开口112,遮挡板111与后甲102固定联接。
50.后甲102在不进行功能拓展的情况下,其顶部开口112采用装饰性面板(遮挡板111)进行遮盖,以保证机器人外观的协调性。
51.当然在机器人腹部亦可同样设置有装饰性面板遮盖,在取掉面板的情况下,背部和腹部留有通过接口,在对机器人进行外部功能部件进行拓展时,方便过线等操作。
52.进一步,腹甲100上固定有用于分割空间(腹甲100、前甲101、后甲102和胸甲103之间联接后可以形成容纳元器件的空间)的挡板114;挡板的数量可以根据实际情况设置。当设有两块时,可以将空间分割为动力舱、控制仓、电源仓等,这样可以方便形成相对独立的
空间,顶部空余位置可用于走线。
53.进一步,还设置显示器支架113,显示器支架113固定在前甲101的前端。
54.显示器可固定在显示器支架113上,可以充当机器人的头部;对于显示器支架113而言可以采用方框结构设置,通过螺栓与显示器联接。对于显示器而言,可以采用触控式显示屏,实现表情显示,功能选择,音视频播放等人机交互功能,表面是封装显示器的框架结构,通过该框架结构,并将扬声器,摄像头等微型电子元器件内置。
55.电源,主控电路板等主要的电子元器件内置于机器人体内,通过多种开合方式的背甲110,可快速对机器人内部电路板进行故障排除,替换,装载等用途。
56.进一步,显示器支架113倾斜设置,即安装后显示器也处于倾斜状态,便于人们观察和操作。
57.实施例二
58.如图8所示,实施例一中背甲110为前后开合方式,本实施例在其基础上增加了背甲110,背甲110为侧面开合方式。增加背甲110一方面可以增大开启面积,另一方面由于设置有背甲110则可以缩短背甲110的长度。
59.具体结构为:在胸甲103与后甲102之间设有背甲110,背甲110与腹甲100的侧边铰接。
60.进一步,同理,背甲110也可以采用快拆螺丝方式与腹甲100可拆卸连接。
61.进一步,背甲110的数量可以根据实际情况设置,当设置为一个时为单侧开结构;当背甲110设有两个,两个背甲110相对设置,可以形成双开结构。
62.进一步,同理,在胸甲103和背甲110上均设有散热孔。
63.进一步,同理,亦设置显示器支架113,显示器支架113固定在前甲101的前端。以及同样优选采用倾斜设置。
64.实施例三
65.本实施例三在实施例一和二的基础上增加了腿部机构,并可形成两种不同的结构,如图9和10所示。
66.如图11至14所示,一种可开合机器人主体,还包括多个腿部机构200,各腿部机构200均与可开合机器人躯体联接;各腿部机构200均包括肩甲201、大腿202和小腿203,大腿202与小腿203之间、大腿202与肩甲201之间以及肩甲201与可开合机器人躯体之间均设有双轴舵机204。
67.双轴舵机204,实轴207为带齿的输出轴,与输出轴相对的为虚轴205,图示案例中舵机在虚轴205一端有螺纹孔,虚轴205采用全新的设计方案,采用高强度材料,虚轴205不提供力的输出,只承担对称式安装的作用,通过这样的方式可以减低输出轴的弯矩,使电机输出能够更加稳定。与虚轴205配合的是固定圆盘206,固定圆盘206耐磨性稍逊于虚轴205,这样的选材方式,可以使机器人长期运行的情况下,低成本更换掉易损件,大大降低机器人后期的维护成本。也可以将虚轴205做易损件处理,固定圆盘206采用高强度材料。对称式安装的的情况下,电机输出能够更加稳定,各项电机的运行参数可以更加准确的呈现,读取。
68.具体连接方式,以大腿202与小腿203联接为例,其余同理:
69.虚轴205与虚轴205端螺纹孔位同心且重合,用螺栓连接,螺栓头部沉入虚轴205轴体内部,虚轴205与固定圆盘206之间同心且间隙配合,固定圆盘206外侧与小臂右内壁处重
合,孔位螺栓连接。
70.实轴207上为齿形轴,与舵盘208上的齿形孔位配合,舵盘208外侧与小腿203左内壁重合,孔位螺栓连接。舵盘208用螺栓与小腿203固定,固定圆盘206用螺栓与小腿203固定。舵机上的孔位与大腿202上相应的孔位同心配合,内壁与舵机固定面板209重合,肩甲201通过90
°
的折弯方式,实现舵机之间的连接。同理,对于两腿的组合方式,同样采取这样的固定方法。其余部件都有相应的螺栓孔位,可直接采用紧固件进行配合。
71.基于开合式的背甲110,机器人的所有数据接口都可进行内置,实现了机器人外表面的统一风格,使呈现出的外观效果更为协调,美观,在对所有接口,电子器件等进行密封处理的情况下,机器人也可实现潜水式运动。
72.该机器人可采取多种交互方式,语音,手势,触摸,手柄遥控,app控制,电脑端控制等,内主板通过替换为不同规格的控制电路板,使机器人能够做到和各用户群体的兼容,其通用性能大大增强。主体结构材料可采用金属或非金属,可根据实际需求进行选择,蹄采用柔性橡胶材质,在用户自行更换的情况下,也可利用目前常用的3d打印材料进行自行设计。
73.上述中采用的铰链可以现有技术中的多种类型或定制铰链,腹甲100、前甲101、后甲102和胸甲103等可以根据需要设置成多种不同的形状。
74.下面对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1