一种基于七轴机器人的刀具测量保护座的制作方法
1.本实用新型涉及智能制造技术领域,尤其是指一种基于七轴机器人的刀具测量保护座。
背景技术:
2.一个七轴加工机器人系统(比方说七轴石雕机器人系统)由以下几个部分组成一个六轴机器人,一个包含电主轴的装夹,一个旋转台和一个刀具长度测量传感器。当设定一台机器人系统时,厂家会先调整和对齐每个部件,但仍然需要去对所有部件相互对齐与校准。其中主轴在安装刀具后要在已设定的程序下自动与刀具长度测量传感器进行接触式校准。
3.在校准过程中主轴刀具与刀具长度测量传感器可能会发生设定外的物理碰撞,此时刀具就可能会因为碰撞而导致损坏。
技术实现要素:
4.本实用新型主要是为了解决上述技术问题,提供一种基于七轴机器人的刀具测量保护座,能够避免机器人刀具由于在校准过程出现设定外的物理碰撞而导致刀具损坏的情况。
5.为了实现上述目的,本实用新型采用以下技术方案:
6.一种基于七轴机器人的刀具测量保护座,包括底座、连接杆和传感器固定座,所述连接杆下端与底座相连,其上端设有安装平台,所述连接杆包括下连接部、溃断部和上连接部,所述溃断部位于所述连接杆的上部位置,所述溃断部采用脆性材料制成,所述溃断部的上下两端设置有连接螺杆,所述上连接部的下端设有与溃断部上连接螺杆匹配的内螺纹,所述下连接部的上端设有与溃断部下连接螺杆匹配的内螺纹,所述上连接部与所述下连接部之间设有柔性连接件。
7.作为优选,所述传感器固定座通过调节座与所述安装平台连接。
8.作为优选,所述调节座包括两个交叉布置的平移调节架,两个所述的平移调节架之间的夹角呈90度,所述平移调节架包括调节架主体和平移块,所述调节架主体由其上表面向下并沿其宽度方向贯通的平移槽,所述平移槽两槽壁之间设有若干根平行于所述调节架主体长度方向的平移滑杆,所述平移块穿设在所述平移滑杆上,位于下方的平移调节架的平移块与位于上方的平移调节架的调节架主体底部固定连接,位于上方的平移调节架的平移块与所述传感器固定座固定连接。
9.作为优选,所述平移调节架还包括调节丝杠,所述调节丝杠与所述平移滑杆平行,所述平移块上设有与所述调节丝杠匹配的内螺纹。
10.作为优选,所述柔性连接件为防脱绳。
11.作为优选,所述连接杆的上连接部或下连接部设有高度调节装置,所述连接杆高度可调。
12.本申请的有益效果在于:传感器固定座安装于所述连接杆的安装平台上,而连接杆上设有溃断部,在机器人刀具进行校准时,若出现设定外的物理碰撞,连接杆的溃断部会先行溃断,以此避免刀具与传感器之间过大的物理碰撞,从而保护刀具,并且连接杆的上连接部与下连接部之间设置了柔性连接件例如防脱绳,使得掉落的传感器不会直接落地,而是悬挂在连接杆上,从而保护传感器。另一方面,本申请的传感器位置调节更加精准,由于调节座的存在使得传感器在安装后能够较好的在所在平面内进行调节,而且调节座的平移调节架设置了调节丝杠,对于精度要求较高的传感器位置调节也能够胜任。
附图说明
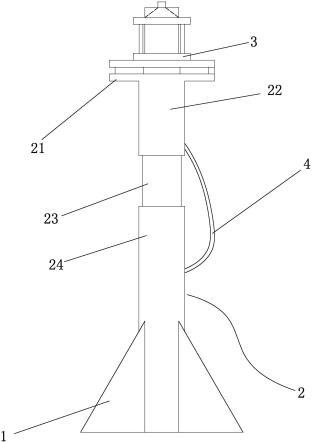
13.图1为实施例1的结构示意图;
14.图2为实施例2中调节座的结构面示意图;
15.图3为实施例2中平移调节架的结构面示意图。
16.图中:底座1、连接杆2、安装平台21、上连接部22、溃断部23、下连接部24、传感器固定座3、柔性连接件4、调节座5、平移调节架50、调节架主体51、平移块52、平移槽53、平移滑杆54、调节丝杠55。
具体实施方式
17.下面结合附图和具体实施方式对本实用新型进一步的描述。
18.以下结合具体实施例和说明书附图对本实用新型作出进一步清楚详细的描述说明。本领域普通技术人员在基于这些说明的情况下将能够实现本实用新型。此外,下述说明中涉及到的本实用新型的实施例通常仅是本实用新型一部分的实施例,而不是全部的实施例。因此,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
19.实施例1
20.本实施例提供一种基于七轴机器人的刀具测量保护座,包括底座1、连接杆2和传感器固定座3,所述连接杆下端与底座相连,其上端设有安装平台21,所述连接杆包括上连接部22、溃断部23和下连接部24,所述溃断部位于所述连接杆的上部位置例如连接杆的2/3高度位置,所述溃断部采用脆性材料制成,所述溃断部的上下两端设置有连接螺杆,所述上连接部的下端设有与溃断部上连接螺杆匹配的内螺纹,所述下连接部的上端设有与溃断部下连接螺杆匹配的内螺纹,所述上连接部与所述下连接部之间设有柔性连接件4。具体的,底座与连接杆的下连接部可以是一体成型,连接杆的上连接部与下连接部之间的柔性连接件可以是防脱绳。更进一步的,所述连接杆的上连接部或下链接部上设置有高度调节装置,使得连接杆高度可调,例如连接杆的安装平台与上连接部之间通过螺纹连接,通过螺纹旋入的程度调节高度,再亦或是连接杆的上连接部的上部中空并设置多级卡槽,安装平台下部为设置直径略小于连接杆的调节管并设置伸缩型卡块,以实现高度调节等等形式均可实现高度调节本领域技术人员可按需设置,不再赘述。
21.采用本实施例的方案的刀具测量保护装置后,机器人在刀具校准时,若由于设定失误或者其他因素造成的刀具参数不合规时,原本刀具与传感器的接触式校准演变成了设定外的碰撞,此时,由于连接杆上设置了溃断部,会使得溃断部受力溃断,连接杆的上连接
部连带着传感器脱落,以此避免了刀具与传感器之间的较大的刚性碰撞,从而保护刀具,而柔性连接件的存在使得传感器不会直接落地而是悬挂在连接杆的下连接部上,防止传感器由于坠落而摔坏,同时也能控制传感器掉落的范围,避免对周边机器造成影响。
22.实施例2
23.本实施例的其他方面与实施例1相似,主要区别在于:所述传感器固定座通过调节座5与所述安装平台21连接。具体的,所述调节座包括两个交叉布置的平移调节架50,两个所述的平移调节架之间的夹角呈90度,所述平移调节架包括调节架主体51和平移块52,所述调节架主体由其上表面向下并沿其宽度方向贯通的平移槽53,所述平移槽两槽壁之间设有若干根平行于所述调节架主体长度方向的平移滑杆54,所述平移块穿设在所述平移滑杆上,位于下方的平移调节架的平移块与位于上方的平移调节架的调节架主体底部固定连接,位于上方的平移调节架的平移块与所述传感器固定座固定连接。更进一步的,所述平移调节架还包括调节丝杠55,所述调节丝杠与所述平移滑杆平行,所述平移块上设有与所述调节丝杠匹配的内螺纹。
24.本实施例中,由于调节座的存在,传感器位置调节更加精准,由于调节座的存在使得传感器在安装后能够较好的在所在平面内进行调节,而且调节座的平移调节架设置了调节丝杠,对于精度要求较高的传感器位置调节也能够胜任。
技术特征:
1.一种基于七轴机器人的刀具测量保护座,包括底座、连接杆和传感器固定座,所述连接杆下端与底座相连,其上端设有安装平台,其特征在于,所述连接杆包括下连接部、溃断部和上连接部,所述溃断部位于所述连接杆的上部位置,所述溃断部采用脆性材料制成,所述溃断部的上下两端设置有连接螺杆,所述上连接部的下端设有与溃断部上连接螺杆匹配的内螺纹,所述下连接部的上端设有与溃断部下连接螺杆匹配的内螺纹,所述上连接部与所述下连接部之间设有柔性连接件。2.根据权利要求1所述的一种基于七轴机器人的刀具测量保护座,其特征在于,所述传感器固定座通过调节座与所述安装平台连接。3.根据权利要求2所述的一种基于七轴机器人的刀具测量保护座,其特征在于,所述调节座包括两个交叉布置的平移调节架,两个所述的平移调节架之间的夹角呈90度,所述平移调节架包括调节架主体和平移块,所述调节架主体由其上表面向下并沿其宽度方向贯通的平移槽,所述平移槽两槽壁之间设有若干根平行于所述调节架主体长度方向的平移滑杆,所述平移块穿设在所述平移滑杆上,位于下方的平移调节架的平移块与位于上方的平移调节架的调节架主体底部固定连接,位于上方的平移调节架的平移块与所述传感器固定座固定连接。4.根据权利要求3所述的一种基于七轴机器人的刀具测量保护座,其特征在于,所述平移调节架还包括调节丝杠,所述调节丝杠与所述平移滑杆平行,所述平移块上设有与所述调节丝杠匹配的内螺纹。5.根据权利要求1或2或3或4所述的一种基于七轴机器人的刀具测量保护座,其特征在于,所述柔性连接件为防脱绳。6.根据权利要求1或2或3或4所述的一种基于七轴机器人的刀具测量保护座,其特征在于,所述连接杆的上连接部或下连接部设有高度调节装置,所述连接杆高度可调。
技术总结
本实用新型公开了一种基于七轴机器人的刀具测量保护座,包括底座、连接杆和传感器固定座,连接杆下端与底座相连,其上端设有安装平台,连接杆包括下连接部、溃断部和上连接部,溃断部位于连接杆的上部位置,溃断部采用脆性材料制成,溃断部的上下两端设置有连接螺杆,上连接部的下端设有与溃断部上连接螺杆匹配的内螺纹,下连接部的上端设有与溃断部下连接螺杆匹配的内螺纹,上连接部与下连接部之间设有柔性连接件。在机器人刀具进行校准时,若出现设定外的物理碰撞,溃断部会先行溃断,避免刀具与传感器之间过大的物理碰撞以保护刀具,并且连接杆的上连接部与下连接部之间设置了柔性连接件,使掉落的传感器悬挂在连接杆上,同时保护传感器。同时保护传感器。同时保护传感器。
技术研发人员:黄加园 陈田田 弗兰克 纳塔鹏 邵望臻 杨振宇 茹开开
受保护的技术使用者:英诺威讯智能科技(杭州)有限公司
技术研发日:2022.04.12
技术公布日:2022/12/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1