一种用于室内导航机器人的防撞装置的制作方法
本技术涉及导航机器人,具体为一种用于室内导航机器人的防撞装置。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,室内导航机器人可通过编程设定行动路径,输入室内具体位置后,可按预先设定的路径进行导航。
2、路径上有时会被人放置障碍物,忘记收走障碍物时,室内导航机器人在导航过程中,会碰撞到障碍物,导致机器人受损。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种用于室内导航机器人的防撞装置,解决了上述背景中提到的问题。
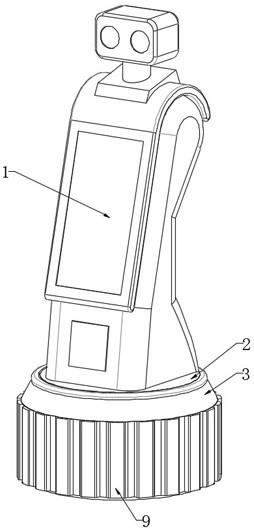
2、本实用新型提供如下技术方案:一种用于室内导航机器人的防撞装置,包括:机器人本体,所述机器人本体的下方设置有底座,所述底座的底部设置有驱动轮,所述底座的表面设置有防撞机构,所述底座的表面套接有固定板,所述固定板的表面设置有多个安装槽,多个所述安装槽以经过固定板的中心为阵列中心呈环形阵列分布,所述安装槽的内壁安装有缓冲机构,所述缓冲机构的表面与防撞机构的内壁活动连接,所述防撞机构的直径大于机器人本体的宽度。
3、优选的,所述防撞机构包括连接环、弹性连接带和防撞板,所述弹性连接带和防撞板均呈环形,所述底座的表面设置有螺纹槽,所述连接环通过螺纹槽螺纹连接在底座的表面,所述弹性连接带连接在连接环的表面,所述防撞板连接在弹性连接带的表面,所述防撞板套接在防护板的表面,所述防撞板的直径大于机器人本体的宽度。
4、优选的,所述缓冲机构包括弧形缓冲板,所述安装槽的顶部和底部均开设有限位槽,所述弧形缓冲板的两端均设置有限位柱,所述限位柱滑动连接在限位槽的内壁。
5、优选的,所述防撞板的表面连接有多个减震条,多个所述安装槽以防撞板的竖直中心轴线为阵列轴线呈环形阵列分布。
6、优选的,所述减震条通过橡胶制备而成。
7、优选的,所述底座的底部设置安装腔,所述安装腔的内壁安装有震动开关、蜂鸣器和电池,所述震动开关、蜂鸣器和电池电性连接。
8、优选的,所述弧形缓冲板通过记忆合金制备而成。
9、与现有技术对比,本实用新型具备以下有益效果:
10、1、该用于室内导航机器人的防撞装置,通过设置连接环、弹性连接带和防撞板,防撞板为环形结构,防撞板的直径大于机器人本体的宽度,当机器人本体运动过程中与地面上的障碍物接触前会先与防撞板接触,减震条在接触的时候进行缓冲,再通过防撞板对机器人本体进行防护。
11、2、该用于室内导航机器人的防撞装置,通过设置弧形缓冲板和限位柱,防撞板受到撞击时与弧形缓冲板接触,弧形缓冲板受到挤压发生形变,同时弧形缓冲板趋于恢复形状,对撞击力进行缓冲,进一步的保护机器人本体。
12、3、该用于室内导航机器人的防撞装置,通过设置安装腔、震动开关、蜂鸣器和电池,若机器人本体发生碰撞后翻倒,则震动开关接通电源,使蜂鸣器通电发出报警,提醒人将机器人本体扶起来。
技术特征:
1.一种用于室内导航机器人的防撞装置,其特征在于,包括:机器人本体(1),所述机器人本体(1)的下方设置有底座(2),所述底座(2)的底部设置有驱动轮,所述底座(2)的表面设置有防撞机构(3),所述底座(2)的表面套接有固定板(4),所述固定板(4)的表面设置有多个安装槽(5),多个所述安装槽(5)以经过固定板(4)的中心为阵列中心呈环形阵列分布,所述安装槽(5)的内壁安装有缓冲机构(6),所述缓冲机构(6)的表面与防撞机构(3)的内壁活动连接,所述防撞机构(3)的直径大于机器人本体(1)的宽度。
2.根据权利要求1所述的一种用于室内导航机器人的防撞装置,其特征在于,所述防撞机构(3)包括连接环(31)、弹性连接带(32)和防撞板(33),所述弹性连接带(32)和防撞板(33)均呈环形,所述底座(2)的表面设置有螺纹槽,所述连接环(31)通过螺纹槽螺纹连接在底座(2)的表面,所述弹性连接带(32)连接在连接环(31)的表面,所述防撞板(33)连接在弹性连接带(32)的表面,所述防撞板(33)套接在防护板的表面,所述防撞板(33)的直径大于机器人本体(1)的宽度。
3.根据权利要求1所述的一种用于室内导航机器人的防撞装置,其特征在于,所述缓冲机构(6)包括弧形缓冲板(61),所述安装槽(5)的顶部和底部均开设有限位槽(7),所述弧形缓冲板(61)的两端均设置有限位柱(62),所述限位柱(62)滑动连接在限位槽(7)的内壁。
4.根据权利要求2所述的一种用于室内导航机器人的防撞装置,其特征在于,所述防撞板(33)的表面连接有多个减震条(9),多个所述安装槽(5)以防撞板(33)的竖直中心轴线为阵列轴线呈环形阵列分布。
5.根据权利要求4所述的一种用于室内导航机器人的防撞装置,其特征在于,所述减震条(9)通过橡胶制备而成。
6.根据权利要求1所述的一种用于室内导航机器人的防撞装置,其特征在于,所述底座(2)的底部设置安装腔(10),所述安装腔(10)的内壁安装有震动开关(11)、蜂鸣器(12)和电池(8),所述震动开关(11)、蜂鸣器(12)和电池(8)电性连接。
7.根据权利要求3所述的一种用于室内导航机器人的防撞装置,其特征在于,所述弧形缓冲板(61)通过记忆合金制备而成。
技术总结
本技术涉及导航机器人技术领域,且公开了一种用于室内导航机器人的防撞装置,包括:机器人本体,所述机器人本体的下方设置有底座,所述底座的底部设置有驱动轮,所述底座的表面设置有防撞机构,所述底座的表面套接有固定板,所述固定板的表面设置有多个安装槽,多个所述安装槽以经过固定板的中心为阵列中心呈环形阵列分布。该用于室内导航机器人的防撞装置,通过设置连接环、弹性连接带和防撞板,防撞板为环形结构,防撞板的直径大于机器人本体的宽度,当机器人本体运动过程中与地面上的障碍物接触前会先与防撞板接触,减震条在接触的时候进行缓冲,再通过防撞板对机器人本体进行防护。
技术研发人员:刘力睿
受保护的技术使用者:刘力睿
技术研发日:20220513
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!