一种气动式杆簇自适应机器人手的制作方法
1.本实用新型属于机器人手技术领域,更具体地说,涉及一种气动式杆簇自适应机器人手。
背景技术:
2.机器人手在机器人领域中有广泛的用途,用于机器人与物体之间建立临时的连接和固定关系,并能够在适当的时候进行释放,前者实现了抓取物体,后者实现了放开物体。一般的机器人手为了降低成本,被制作成具有两个相对运动的部分,以便于简单地实现抓取和释放的功能。也有许多模仿人手的结构,设计更多的手指和手指上的若干关节,但是那样会带来机械系统、传感系统、控制系统和控制算法的复杂度和高昂的成本。部分机器人手具有适应性,即在抓取前并未知晓要抓取物体的形状与大小,在抓取中也未对抓取的物体进行传感检测,但是却可以自适应地抓取,这种对于物体形状、大小的自动适应性能使得机器人手在实现更为广泛抓取不同物体的同时并不增加传感与控制需求。
3.peter b.scott在文献(peter b.scott,“the’omnigripper’:a form of robot universal gripper”,robotica,vol.3:pp 153-158,1985)中介绍了一种机械被动式适应物体形状的通用夹持器omnigripper。该夹持器具有两组杆簇集合的结构,每组杆簇集合有多个相互平行的长杆,这些由待抓物体推动而自由上下滑动的长杆达到了适应物体形状的目的,再结合驱动器驱动两组杆簇靠拢或离开,实现对物体的抓持。举例来说,当机器人的末端靠向放置在某个支持面(如桌面)上的物体时,物体挤压长杆使其向基座内滑动,由于长杆数量较多,且长杆较细(直径较小),不同的长杆接触到不同的物体表面点,各长杆由于物体形状向手掌内的滑动距离不同;之后,一左一右的两组杆簇集合再合拢夹持住物体,利用长杆从侧面夹持住物体,达到抓取目的。
4.然而该装置的不足之处在于:(1)无法做到多向抓持:该装置对目标物体施加抓取力时,该抓取力只能沿着两组杆簇集合合拢的方向,相当于二指夹持器,产生的仅仅是一维夹持模式,夹持效果差;(2)对于特定方向放置的长条状物体抓持失效:当目标物体与该方向平行且目标物体在该方向上长于该装置,则目标物体不会因两组伸缩杆合拢而受到抓持力,如抓取一个长条状的物体;(3)结构复杂、能耗大:该装置有2组杆簇集合,需要2个相互运动的可运动支承件(或运动基座)、一套直线导轨、2个滑块、驱动器、传动机构等,结构较为复杂,且要让一个具有许多长杆的笨重杆簇集合运动是比较耗能的;(4)抓持稳定性有待提高:该装置仅采用两组杆簇集合合拢而产生的抓持力对目标物体进行抓取,缺少较好的包络式形封闭抓取效果。力封闭抓取物体未必一定会产生形封闭抓取,但是形封闭抓取一定包括了力封闭抓取,因此抓取稳定性已达到形封闭为最好;(5)抓取物体时各杆的夹持力不均匀:该装置采用两组杆簇平动合拢的方式夹取物体,夹取物体时每组杆簇中最先接触到物体的杆将受到最大的侧向力,最后接触到物体的杆受到的力最小。因此抓持物体的杆所受的夹持力将不均匀特别是抓取刚性较大物体的时候,这样就可能导致最先接触物体的杆产生弯曲变形。
5.再例如中国发明专利cn105583831a公开了一种流体驱动柔性杆簇自适应机器人手装置,利用多个滑动推杆获得对物体大小和形状的自适应效果;利用流体排出、膜皮和推杆的弯曲弹性实现多个推杆向中心聚拢的弯曲变形,达到对物体的多向抓持效果,由于膜皮为柔性材料,使用寿命与可靠性将受到限制。此外,中国专利还公开了一系列的类似技术专利,如cn105856269a-负压辅助杆簇自适应机器人手装置;cn105583850a-柔性件缠绕弹性变位杆簇自适应机器人手装置;cn105619427a-主动锁定流体式柔性杆簇自适应机器人手装置;cn109571539a-可控力的快速抓取杆簇自适应机器人手装置;cn105619441a-多指紧箍弹性变位杆簇自适应机器人手装置,上述的这些专利均是对机器人手的改进,有效地适应物体的外形轮廓。
技术实现要素:
6.1.要解决的问题
7.针对现有机器人手不能很好地适应物体外形轮廓而抓取的问题,本实用新型提供一种气动式杆簇自适应机器人手,实现对形状复杂物体的自适应抓取。
8.2.技术方案
9.为了解决上述问题,本实用新型所采用的技术方案如下:
10.本实用新型的气动式杆簇自适应机器人手,包括:
11.驱动部件,其包括气缸、拉盘、拉杆和拉杆套,所述气缸通过伸缩杆、延长杆与所述拉盘中心连接,所述拉盘上围绕其中心均设有若干通孔;所述拉杆穿过通孔下端与所述拉杆套一端转动连接;
12.基座,其直径大于所述拉盘的直径,所述基座上设有与所述拉杆数量相一致的支座,在所述拉杆套另一端与所述支座转动连接,所述基座上开设有滑动孔;
13.抓取部件,其包括若干滑动杆,所述滑动杆的数量大于等于所述拉杆的数量,所述滑动杆的上端穿过所述滑动孔及拉杆套,并由限位环限位,所述滑动杆的下端为自由端。
14.于本实用新型一种可能实施方式中,所述拉杆套设有弹簧后穿过通孔,下端与所述拉杆套一端转动连接,所述弹簧抵靠在通孔的上端面。
15.于本实用新型一种可能实施方式中,所述拉盘上设圆台与通孔配合,弹簧抵靠在圆台的内侧面。
16.于本实用新型一种可能实施方式中,所述滑动孔的直径大于滑动杆的外径。
17.于本实用新型一种可能实施方式中,所述拉杆下端与所述拉杆套一端销轴连接。
18.于本实用新型一种可能实施方式中,所述拉杆套另一端与所述支座销轴连接。
19.于本实用新型一种可能实施方式中,所述基座直径是所述拉盘直径的1.5-2倍。
20.于本实用新型一种可能实施方式中,所述滑动杆的数量等于所述拉杆的数量。
21.于本实用新型一种可能实施方式中,所述限位环与滑动杆为一体式结构。
22.于本实用新型一种可能实施方式中,所述基座上配合设有壳体。
23.3.有益效果
24.相比于现有技术,本实用新型的有益效果为:
25.本实用新型的气动式杆簇自适应机器人手,具有较强的形状适应能力可抓取任意形状的物体,抓取物体时可实现对物体的柔性抓取且对物体形成形封闭和力封闭;此外可
以产生强大的抓取力,可以抓取一些较重的物体。
附图说明
26.图1为本实用新型气动式杆簇自适应机器人手结构示意图;
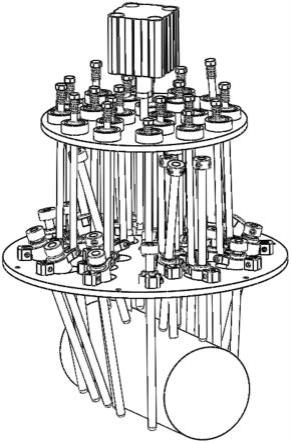
27.图2为本实用新型气动式杆簇自适应机器人手去掉壳体结构示意图;
28.图3为本实用新型气动式杆簇自适应机器人手结构剖面图;
29.图4为本实用新型气动式杆簇自适应机器人手结构剖面正视图;
30.图5为本实用新型气动式杆簇自适应机器人手局部剖视图;
31.图6为本实用新型气动式杆簇自适应机器人手抓取示意图。
32.图中标记为:
33.100、驱动部件;110、气缸;120、拉盘;121、通孔;122、圆台;130、拉杆;140、拉杆套;150、弹簧;160、伸缩杆;170、延长杆;
34.200、基座;210、支座;220、滑动孔;230、壳体;
35.300、抓取部件;310、滑动杆;320、限位环。
具体实施方式
36.下文对本实用新型的示例性实施例进行了详细描述。尽管这些示例性实施例被充分详细地描述以使得本领域技术人员能够实施本实用新型,但应当理解可实现其他实施例且可在不脱离本实用新型的精神和范围的情况下对本实用新型作各种改变。下文对本实用新型的实施例的更详细的描述并不用于限制所要求的本实用新型的范围,而仅仅为了进行举例说明且不限制对本实用新型的特点和特征的描述,以提出执行本实用新型的最佳方式,并足以使得本领域技术人员能够实施本实用新型。因此,本实用新型的范围仅由所附权利要求来限定。
37.如图1至图6所示,本实施例的气动式杆簇自适应机器人手包括驱动部件100、基座200和抓取部件300。
38.其中,驱动部件100包括气缸110、拉盘120、拉杆130和拉杆套140,所述气缸110通过伸缩杆160、延长杆170与所述拉盘120中心连接,如图4所示,所述伸缩杆160与延长杆170通过螺纹连接,所述拉盘120上围绕其中心均设有若干通孔121;所述拉杆130穿过通孔121下端与所述拉杆套140一端转动连接,转动连接可以采用销轴连接、铰接等等。
39.其中,基座200呈圆盘状,其外配有壳体230,基座200的直径大于所述拉盘120的直径,所述基座200直径是所述拉盘120直径的1.5-2倍,在本实施例中,优选的所述基座200直径是所述拉盘120直径的1.5倍,所述基座200上设有与所述拉杆130数量相一致的支座210,在所述拉杆套140另一端与所述支座210转动连接,转动连接可以采用销轴连接、铰接等等,所述基座200上开设有滑动孔220,所述滑动孔220的直径大于滑动杆310的外径,使得滑动杆310可以竖直方向有一定的倾斜度,从而更好地适应性抓取物体。
40.其中,抓取部件300包括若干滑动杆310,所述滑动杆310的数量大于等于所述拉杆130的数量,优选的,所述滑动杆310的数量等于所述拉杆130的数量;所述滑动杆310的上端穿过所述滑动孔220及拉杆套140,并由限位环320限位,所述限位环320与滑动杆310为一体式结构,制作较为方便,所述滑动杆310的下端为自由端。
41.本机器人手采用气缸110驱动,可提供强大的抓取力,尤其适用与一些较重物体的抓取,此外利用气缸110通过拉盘120和拉杆130拉动各个滑动杆310向内聚拢,完成对物体的形封闭和力封闭,设计较大行程的伸缩式杆簇(伸缩杆160的行程决定),当杆簇接近物体时在重力的作用下良好地贴合物体表面,实现自适应,如图6所示,可以应用任意形状外形的物体。
42.在本实施例中,如图3所示,拉杆130与拉盘120之间为硬性接触,因此所述拉杆套140设有弹簧150后穿过通孔121,下端与所述拉杆套140一端转动连接,所述弹簧150抵靠在通孔121的上端面。每个拉杆130和拉盘120之间设置有弹簧150保证对物体的柔性抓取。
43.在本实施例中,如图2所示,所述拉盘120上设圆台122与通孔121配合,弹簧150抵靠在圆台122的内侧面。
44.当抓取物体时,滑动杆310的自由端抵靠在物体上,同时适应物体的表面形状,滑动杆310向上移动;气缸110动作,带动拉盘120、拉杆130动作,同时带动拉杆套140,拉杆套140相对支座210转动,从而使得滑动杆310在重力方向受到夹紧力,将物体抓起来。
45.最后需要说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制技术方案,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以做出若干改进或同等替换,而不脱离本技术方案的宗旨和范围,均应涵盖再本实用新型的权利要求范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1