一种写字机器人控制电路
1.本实用新型涉及一种主控电路控制技术领域,具体涉及一种写字机器人控制电路。
背景技术:
2.机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械,狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人,在当代工业中机器人指能自动执行任务的人造机器装置用以取代或协助人类工作,理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发。
3.但是随着科技的发展技术的进步,对于人工智能的机器人越来越重视,而用于人工智能的机器人有有多种,对于不同的领域的人工智能的机器人所需要的主控电路是不同的特别是现在研究机器人写字方面的控制电路十分短缺。
技术实现要素:
4.本实用新型的目的是解决现有技术的不足,提出一种写字机器人控制电路实现抬笔和下笔,就能实现写字、画图和打印图片功能。
5.一种写字机器人控制电路,包括:
6.运动控制翻译模块,用于将串口烧录过来的指令翻译成可执行的机器语言;
7.x步进电机、y步进电机和提笔舵机的驱动模块,执行机器语言实施控制指令,用脉冲宽度调制的方式驱动x、y轴步进电机和提笔舵机进行驱动作业;
8.机器臂末端操作器,用于直接抓取、握紧、吸附等操作的部件。
9.进一步地,所述运动控制翻译模块包括atmega328驱动芯片和iscp芯片,所述atmega328驱动芯片引脚31端串联1k电阻,引脚30端串联1k电阻,引脚29串联10k阻值的r6,所述r6并联1k阻值的r3、r4、r5,所述电阻r3、r4、r5分别串联二极管,所述r6并联iscp芯片。
10.进一步地,所述x步进电机、y步进电机和提笔舵机的驱动模块包括ic芯片,所述ic芯片的引脚7、8连接电容c4两端,所述ic芯片的引脚10、11、12连接开关m0、m1、m2,所述引脚1接地,所述ic芯片的引脚13设置为reset,所述ic芯片的引脚14设为sleer,所述ic芯片的引脚3、4、5、6连接步进电机。
11.进一步地,所述运动控制翻译模块和所述x步进电机、y步进电机和提笔舵机的驱动模块之间通过排母连接。
12.进一步地,所述机器臂末端操作器包括提笔装置和自来水笔组成,所述提笔装置包括舵机、尼龙柱。
13.进一步地,所述串口烧录过来的指令为g代码,所述g代码指令转换成左右两步进电机的脉冲,使步进电机按照特定的节奏和方向转动。
14.与现有技术相比,本实用新型的有益效果为:本实用新型通过运动控制翻译模块
将g代码翻译成机器语言,机器语言同时驱动x步进电机、y步进电机和提笔舵机进行写字,机器臂末端操作器通过提笔装置和自来水笔完成着书写过程。
附图说明
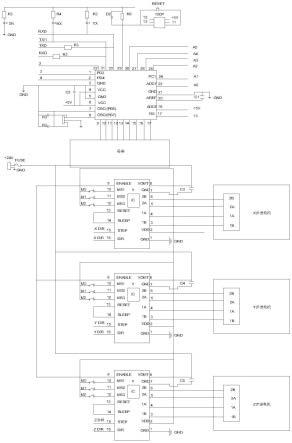
15.图1所示为本实用新型主电路图
16.图2所示为本实用新型运动控制翻译模块电路图;
17.图3所示为本实用新型x步进电机、y步进电机和提笔舵机的驱动模块电路图;
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.如图1至3所示的一种写字机器人控制电路,一种写字机器人控制电路,包括:
20.运动控制翻译模块,用于将串口烧录过来的指令翻译成可执行的机器语言;
21.x步进电机、y步进电机和提笔舵机的驱动模块,执行机器语言实施控制指令,用脉冲宽度调制的方式驱动x、y轴步进电机和提笔舵机进行驱动作业;
22.机器臂末端操作器,用于直接抓取、握紧、吸附等操作的部件。
23.优选地,所述串口烧录过来的指令为g代码,所述g代码指令转换成左右两步进电机的脉冲,使步进电机按照特定的节奏和方向转动。
24.优选地,所述运动控制翻译模块和所述x步进电机、y步进电机和提笔舵机的驱动模块之间通过排母连接。
25.优选地,所述运动控制翻译模块包括atmega328驱动芯片和iscp芯片,所述atmega328驱动芯片引脚31端串联1k电阻,引脚30端串联1k电阻,引脚29串联10k阻值的r6,所述r6并联1k阻值的r3、r4、r5,所述电阻r3、r4、r5分别串联二极管,所述r6并联iscp芯片。
26.优选地,所述x步进电机、y步进电机和提笔舵机的驱动模块包括ic芯片,所述ic芯片的引脚7、8连接电容c4两端,所述ic芯片的引脚10、11、12连接开关m0、m1、m2,所述引脚1接地,所述ic芯片的引脚13设置为reset,所述ic芯片的引脚14设为sleer,所述ic芯片的引脚3、4、5、6连接步进电机。
27.优选地,所述机器臂末端操作器包括提笔装置和自来水笔组成,所述提笔装置包括舵机、尼龙柱。
28.本实用新型的工作原理:使用时,arduino uno r3开发板作为控制板,用grb1运动控制软件作为控制板固件,再搭载主扩展板shliedv3和a4988步进电机驱动板作为步进电机的驱动。写字机器人运行的过程是,首先在电脑上通过奎享的g代码生成器生成所需书写文字的g代码,然后通过串口传输工具和数据线将g代码传输到控制板上,由grb1翻译g代码指令转换成左右两步进电机的脉冲,使步进电机按照特定的节奏和方向转动,再通过步进电机内部的同步带轮传动系统带动末端执行机构在纸上书写出文字。
29.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保
护范围之内。
技术特征:
1.一种写字机器人控制电路,其特征在于,包括:atmega328 驱动芯片,所述atmega328 驱动芯片与电阻r6串联,以及与所述电阻r6并联的iscp芯片,其中所述电阻r6并联电阻r3、电阻r4、电阻r5,所述电阻r3、电阻r4、电阻r5分别串联二极管;三个驱动模块,所述三个驱动模块分别与所述atmega328 驱动芯片电连接;x步进电机、y步进电机和提笔舵机,所述x步进电机、所述y步进电机和所述提笔舵机分别连接单个驱动模块;机器臂末端操作器,所述机器臂末端操作器包括提笔装置和自来水笔,所述提笔装置包括舵机和尼龙柱。2.根据权利要求1所述的一种写字机器人控制电路,其特征在于:三个所述驱动模块包括ic芯片,所述ic芯片的7引脚、8引脚连接电容c4两端,所述ic芯片的10引脚、11引脚、12引脚连接开关m0、开关m1、开关m2,所述ic芯片的1引脚接地,所述ic芯片的13引脚设置为reset,所述ic芯片的14引脚设为sleer,所述ic芯片的3引脚、4引脚、5引脚、6引脚连接x步进电机或y步进电机或提笔舵机。3.根据权利要求1所述的一种写字机器人控制电路,其特征在于:所述atmega328 驱动芯片和三个所述驱动模块之间通过排母连接。
技术总结
本实用新型公开了一种写字机器人控制电路,其特征在于,包括:ATmega328驱动芯片,所述ATmega328驱动芯片与电阻R6串联,以及与所述电阻R6并联的ISCP芯片,其中所述电阻R6并联电阻R3、电阻R4、电阻R5,所述电阻R3、电阻R4、电阻R5分别串联二极管;三个驱动模块,所述三个驱动模块分别与所述ATmega328驱动芯片电连接;X步进电机、Y步进电机和提笔舵机,所述X步进电机、所述Y步进电机和所述提笔舵机分别连接单个驱动模块;机器臂末端操作器,所述机器臂末端操作器包括提笔装置和自来水笔,所述提笔装置包括舵机和尼龙柱机器臂末端操作器通过提笔装置和自来水笔完成着书写过程,整个主电路和步进电机兼容性好、能耗低。能耗低。能耗低。
技术研发人员:邓荣春 吴允强 潘杰 杨帆 杨雨涵
受保护的技术使用者:南昌理工学院
技术研发日:2022.06.20
技术公布日:2022/11/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1