一种双向绳驱动膝关节康复训练外骨骼机器人
3与大腿绑缚模块2固定连接,伸缩带1-2一端绕过腰带1-1,伸缩带1-2另一端绕过伸缩带扣1-3,伸缩带1-2两端粘贴连接。
9.所述大腿绑缚模块2包括大腿板2-1以及大腿绑缚组件;其中,大腿绑缚组件包括大腿绑缚固定块2-2-1、大腿绑缚调节块2-2-2、大腿绑缚连接块2-2-3;大腿绑缚固定块2-2-1与大腿板2-1固定连接,大腿绑缚固定块2-2-1两侧分别布置依次连接的多个大腿绑缚调节块2-2-2,位于端部的大腿绑缚调节块2-2-2与大腿绑缚连接块2-2-3转动连接,大腿板2-1一端与腰部绑缚模块1固定连接,大腿板2-1另一端与膝关节绕线模块3固定连接;和/或
10.所述小腿绑缚模块5包括小腿板5-1以及小腿绑缚组件;其中,小腿绑缚组件包括小腿绑缚固定块5-2-1、小腿绑缚调节块5-2-2、小腿绑缚连接块5-2-3;小腿绑缚固定块5-2-1与小腿板5-1固定连接,小腿绑缚固定块5-2-1两侧分别布置依次连接的多个小腿绑缚调节块5-2-2,位于端部的小腿绑缚调节块5-2-2与小腿绑缚连接块5-2-3转动连接,小腿板5-1一端与小腿可调结构4固定连接,小腿板5-1另一端与为自由端。
11.所述膝关节绕线模块3包括传感系统、膝关节外壳、膝关节远端滑轮3-3、扭矩传感器3-4、小腿连接件3-5;其中传感系统包括编码器端盖3-1-1、编码器3-1-2、磁铁3-1-3、磁铁固定块3-1-4,膝关节外壳包括膝关节前外壳3-2-1、膝关节后外壳3-2-2;其中,编码器3-1-2与编码器端盖3-1-1固定连接,编码器端盖3-1-1与膝关节前外壳3-2-1固定连接,磁铁3-1-3放置于磁铁固定块3-1-4中心凹槽内固定,磁铁固定块3-1-4与膝关节远端滑轮3-3同轴固定连接,膝关节前外壳3-2-1与膝关节远端滑轮3-3一侧转动连接,膝关节前外壳3-2-1内侧限位块与与膝关节远端滑轮3-3一侧的限位滑槽配合,膝关节远端滑轮3-3另一侧与扭矩传感器3-4同轴固定连接,小腿连接件3-5与膝关节后外壳3-2-2同轴转动连接,将扭矩传感器3-4放置于小腿连接件3-5内部,将扭矩传感器3-4与小腿连接件3-5固定连接,膝关节前外壳3-2-1与膝关节后外壳3-2-2固定连接,小腿连接件3-5下部与小腿可调结构4转动连接;穿过膝关节前外壳3-2-1的鲍登绳6-4绕过膝关节远端滑轮3-3、再返程穿过膝关节前外壳3-2-1,鲍登绳6-4与膝关节远端滑轮3-3固定连接。
12.所述膝关节绕线模块3还包括膝关节插拔组件和/或膝关节线管固定组件;
13.所述膝关节插拔组件包括膝关节插拔外壳3-6-1、膝关节插拔卡扣3-6-3、弹簧3-6-4、膝关节插拔卡扣帽3-6-5;其中,膝关节插拔外壳3-6-1与膝关节前外壳3-2-1固定连接,膝关节插拔卡扣3-6-3穿过膝关节插拔外壳3-6-1与膝关节插拔卡扣帽3-6-5固定连接,弹簧3-6-4固定在膝关节插拔卡扣3-6-3与膝关节插拔外壳3-6-1之间;通过膝关节插拔组件与大腿绑缚模块2中大腿板2-1固定连接;
14.所述膝关节线管固定组件包括膝关节线管固定块、膝关节线管连接头;其中,膝关节前外壳3-2-1上部及膝关节线管固定块设有槽孔,将膝关节线管连接头放置槽孔中,膝关节线管固定块与膝关节前外壳3-2-1固定连接,使得膝关节线管连接头固定在膝关节前外壳3-2-1与膝关节线管固定块之间。
15.所述动力系统模块6包括电源组件6-1、电机组件6-2、腰部绕线轮组件、鲍登绳6-4、腰部外壳、腰部挂钩6-6;其中,腰部外壳包括腰部前盖6-5-1与腰部后盖6-5-2,腰部挂钩6-6与腰部后盖6-5-2固定连接,电源6-1放置于腰部后盖6-5-2卡槽中固定,电机组件6-2的定子与腰部后盖6-5-2固定连接,电机组件6-2的转子与腰部绕线轮组件同轴固定连接;鲍登绳6-4依次绕过腰部绕线轮组件、绕过膝关节绕线模块3中膝关节远端滑轮3-3后回到动
力系统模块6中与鲍登绳6-4首尾相接固定。
16.所述腰部绕线轮组件包括腰部绳索固定块6-3-1、腰部绕线轮6-3-2、腰部绕线轮第一端盖6-3-3、腰部绕线轮第二端盖6-3-4、腰部线管连接头、腰部线管固定块;其中,腰部绕线轮6-3-2与电机组件6-2的转子同轴固定连接,腰部绳索固定块6-3-1与腰部绕线轮6-3-2固定连接,腰部绕线轮第一端盖6-3-3及腰部绕线轮第二端盖6-3-4与电机组件6-2的定子固定连接,腰部绕线轮第二端盖6-3-4一侧及腰部线管固定块设有槽孔,将腰部线管连接头放置其槽孔中,腰部线管固定块与腰部绕线轮第二端盖固定连接,使得腰部线管连接头固定在腰部绕线轮第二端盖6-3-4与腰部线管固定块之间;
17.所述腰部线管连接头包括腰部左线管连接头6-3-5-1以及腰部右线管连接头6-3-5-2,腰部线管固定块包括腰部左线管固定块6-3-6-1以及腰部右线管固定块6-3-6-2;鲍登绳6-4依次绕过腰部绕线轮6-3-2、穿过腰部右线管连接头6-3-5-2、绕过膝关节远端滑轮3-3、穿过腰部右线管连接头6-3-5-1、绕回腰部绕线轮6-3-2后首尾连接并与腰部绳索固定块6-3-1固定连接。
18.所述腰部线管固定块内部沿轴向方向设有多个弧形槽。
19.所述移动支撑架模块7包括支撑架主体7-1、距离探测器7-2、支撑架前轮7-3、支撑架后轮7-4、后轮固定块7-5、移动支撑架后轮电机7-6、移动支撑架电源7-7;距离探测器7-2与支撑架主体7-1固定连接,支撑架前轮7-3与支撑架主体7-1固定连接,后轮固定块7-5与支撑架主体7-1固定连接,支撑架后轮7-4与后轮固定块7-5一端固定连接,移动支撑架后轮电机7-6与后轮固定块7-5另一端固定连接,移动支撑架电源7-7放置于支撑架主体7-1底部卡槽内固定。
20.本实用新型的有益效果是:
21.1、本实用新型选择了结构轻便的柔性驱动方式——绳驱动,较于市场常见的刚性驱动方式具有更好的人体柔顺性,且传距远、结构轻便;且本实用新型采用了双向绳驱动方式,较于单向绳驱动只在伸膝时提供助力,本实用新型在伸膝和屈膝时均可提供助力,使患者在穿戴行走过程中更加轻便,有助于患者康复。
22.2、本实用新型简化了下肢外骨骼机器人结构,降低了下肢外骨骼机器人的总体重量,将腰部的能源动力系统与下肢外骨骼结构分离布置,转移到移动支撑架上放置,减轻了患者的下肢负担;优化了移动支撑架的整体功能设计,增加了视觉跟随技术,提高了康复外骨骼机器人在康复训练过程中的轻便性与灵活性。
23.3、本实用新型充分考虑了不同人体体型需求及膝关节自由度需求,增加了患者穿戴的舒适度及与腿部的贴合度,设计了下肢外骨骼机器人可拆卸功能,可将大腿绑缚模块、小腿绑缚模块与膝关节绕线模块快速拆卸,便于整体收纳,降低空间占用率。
24.综上,本实用新型具有双向助力、结构轻便、分离布置、视觉跟随、快速拆卸、穿戴舒适的有益效果。
附图说明
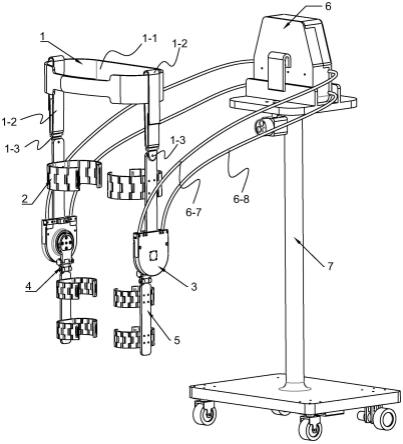
25.图1是本实用新型整体结构的正面示意图;
26.图2是本实用新型整体结构的背面示意图;
27.图3是本实用新型的大腿绑缚机构和膝关节结构的局部爆炸图;
28.图4是本实用新型的膝关节结构的正面爆炸图;
29.图5是本实用新型的膝关节结构的背面爆炸图;
30.图6是本实用新型的小腿绑缚机构和膝关节结构的局部爆炸图;
31.图7是本实用新型的动力系统结构的爆炸图;
32.图8是本实用新型的移动支撑架的结构示意图;
33.图9是本实用新型的动力系统模块的正面剖视图;
34.图10是本实用新型的腰部线管固定块的结构示意图;
35.图11是本实用新型的腰部绳索固定块的结构示意图一;
36.图12是本实用新型的腰部绳索固定块的结构示意图二;
37.图13是本实用新型的腰部绳索固定块的结构示意图三;
38.图14是本实用新型的腰部绳索固定块的剖视图;
39.图中各标号为:1、腰部绑缚模块;1-1、腰带;1-2、伸缩带;1-3、伸缩带扣;2、大腿绑缚模块;2-1、大腿板;2-2-1、大腿绑缚固定块;2-2-2、大腿绑缚调节块;2-2-3、大腿绑缚连接块;3、膝关节绕线模块;3-1-1、编码器端盖;3-1-2、编码器;3-1-3、磁铁;3-1-4、磁铁固定块;3-2-1、膝关节前外壳;3-2-2、膝关节后外壳;3-3、膝关节远端滑轮;3-4、扭矩传感器;3-5、小腿连接件;3-6-1、膝关节插拔外壳;3-6-2、膝关节插拔滑盖;3-6-3、膝关节插拔卡扣;3-6-4、弹簧;3-6-5、膝关节插拔卡扣帽;3-7-1-1、膝关节左线管固定块;3-7-1-2、膝关节右线管固定块;3-7-2-1、膝关节左线管连接头;3-7-2-2、膝关节右线管连接头;4、小腿可调结构;4-1、自由度摆动件;4-2-1、梅花螺栓;4-2-2、梅花螺母;4-3、小腿连接轴;5、小腿绑缚模块;5-1、小腿板;5-2-1、小腿绑缚固定块;5-2-2、小腿绑缚调节块;5-2-3、小腿绑缚连接块;6、动力系统模块;6-1、电源组件;6-2、电机组件;6-3-1、腰部绳索固定块;6-3-2、腰部绕线轮;6-3-3、腰部绕线轮上端盖;6-3-4、腰部绕线轮下端盖;6-3-5-1、腰部左线管连接头;6-3-5-2、腰部右线管连接头;6-3-6-1、腰部左线管固定块;6-3-6-2、腰部右线管固定块;6-4、鲍登绳组件;6-5-1、腰部前盖;6-5-2、腰部后盖;6-6、腰部挂钩;6-7、第一鲍登绳线管;6-8、第二鲍登绳线管;7、移动支撑架模块;7-1、支撑架主体;7-2、距离探测器;7-3、支撑架前轮;7-4、支撑架后轮;7-5、后轮固定块;7-6、移动支撑架后轮电机;7-7、移动支撑架电源。
具体实施方式
40.下面结合附图和实施例,对实用新型做进一步的说明,但本实用新型的内容并不限于所述范围。
41.实施例1:如图1-14所示,一种双向绳驱动膝关节康复训练外骨骼机器人,包括腰部绑缚模块1、大腿绑缚模块2、膝关节绕线模块3、小腿可调结构4、小腿绑缚模块5、动力系统模块6,所述大腿绑缚模块2一端连接腰部绑缚模块1,大腿绑缚模块2另一端连接膝关节绕线模块3一端,膝关节绕线模块3另一端通过小腿可调模块4连接小腿绑缚模块5,小腿绑缚模块5另一端为自由端;动力系统模块6中鲍登绳6-4绕过膝关节绕线模块3后回到动力系统模块6中与鲍登绳6-4首尾相接固定。
42.可选地,还包括移动支撑架模块7;所述动力系统模块6放置在移动支撑架模块7上。
43.可选地,所述腰部绑缚模块1包括腰带1-1、伸缩带1-2以及伸缩带扣1-3;其中,伸
缩带扣1-3与大腿绑缚模块2固定连接,伸缩带1-2两端可自由粘贴改变伸缩带长度,伸缩带1-2一端绕过腰带1-1,另一端绕过伸缩带扣1-3,两端粘贴连接。
44.通过采用上述技术方案,通过调节伸缩带1-2可适应不同人体膝关节到髋关节的距离,使下肢外骨骼机器人与人体穿戴更牢靠,且通过伸缩带将下肢外骨骼与腰带1-1连接,避免下肢外骨骼机器人与人体腿部绑缚不牢固导致下肢外骨骼下滑,从而出现下肢外骨骼机器人膝关节轴线与人体膝关节轴线错位的情况。
45.可选地,所述大腿绑缚模块2包括大腿板2-1以及大腿绑缚组件;其中,大腿绑缚组件包括大腿绑缚固定块2-2-1、大腿绑缚调节块2-2-2、大腿绑缚连接块2-2-3;大腿绑缚固定块2-2-1与大腿板2-1固定连接,大腿绑缚固定块2-2-1两侧分别布置依次连接的多个大腿绑缚调节块2-2-2,位于端部的大腿绑缚调节块2-2-2与大腿绑缚连接块2-2-3转动连接,大腿板2-1一端与腰部绑缚模块1中伸缩带扣1-3固定连接,大腿板2-1另一端与膝关节绕线模块3固定连接。
46.具体而言,如图3所示,所述大腿绑缚组件包括大腿绑缚固定块2-2-1、大腿绑缚调节块2-2-2、大腿绑缚连接块2-2-3;大腿板2-1中间放置一个大腿绑缚固定块2-2-1,左右两边各转动连接四个大腿绑缚调节块2-2-2(即第一大腿绑缚调节块2-2-2与大腿绑缚固定块2-2-1通过弹性销转动连接,大腿绑缚连接块2-2-3与第四大腿绑缚调节块2-2-2通过弹性销转动连接,大腿绑缚连接块2-2-3之间通过弹性销转动连接),两端尾部各转动连接一个大腿绑缚连接块2-2-3,其均使用弹性销转动连接,共同形成一个开口链,链两端使用魔术贴绑带将下肢外骨骼机器人腿部与人体腿部固定连接。需要说明的是,大腿绑缚调节块2-2-2的数量可以根据需要调整。
47.通过采用上述技术方案,将腿部绑缚结构设计为柔性结构,可适应不同穿戴者体型,增加下肢外骨骼与人体腿部贴合度,提高穿戴者的舒适感和灵活性。
48.所述膝关节绕线模块3包括传感系统、膝关节外壳、膝关节远端滑轮3-3、扭矩传感器3-4、小腿连接件3-5;其中传感系统包括编码器端盖3-1-1、编码器3-1-2、磁铁3-1-3、磁铁固定块3-1-4,膝关节外壳包括膝关节前外壳3-2-1、膝关节后外壳3-2-2;其中,编码器3-1-2与编码器端盖3-1-1固定连接,编码器端盖3-1-1与膝关节前外壳3-2-1固定连接,磁铁3-1-3放置于磁铁固定块3-1-4中心凹槽内固定,磁铁固定块3-1-4与膝关节远端滑轮3-3同轴固定连接,膝关节前外壳3-2-1与膝关节远端滑轮3-3一侧转动连接,膝关节前外壳3-2-1内侧限位块与与膝关节远端滑轮3-3一侧的限位滑槽配合,膝关节远端滑轮3-3另一侧与扭矩传感器3-4同轴固定连接,小腿连接件3-5与膝关节后外壳3-2-2同轴转动连接,将扭矩传感器3-4放置于小腿连接件3-5内部,将扭矩传感器3-4与小腿连接件3-5固定连接,膝关节前外壳3-2-1与膝关节后外壳3-2-2固定连接,小腿连接件3-5下部与小腿可调结构4转动连接;穿过膝关节前外壳3-2-1的鲍登绳6-4绕过膝关节远端滑轮3-3、再返程穿过膝关节前外壳3-2-1,鲍登绳6-4与膝关节远端滑轮3-3固定连接。
49.具体而言,如图3-图5所示,编码器3-1-2与编码器端盖3-1-1通过螺栓固定连接,编码器端盖3-1-1与膝关节前外壳3-2-1通过螺栓固定连接,磁铁3-1-3放置于磁铁固定块3-1-4中心凹槽内固定,磁铁固定块3-1-4与膝关节远端滑轮3-3通过螺栓同轴固定连接,此时编码器3-1-2中心芯片与磁铁3-1-3同轴线,且编码器3-1-2中心芯片与磁铁3-1-3距离保持在可以正常使用的编码器与磁铁规定距离范围内;膝关节前外壳3-2-1内侧旋转轴通过
轴承与膝关节远端滑轮3-3一侧凹槽转动连接,配合角度位置为外骨骼机器人初始直立状态下,膝关节前外壳3-2-1内侧中心下方一凸起限位块放置在膝关节远端滑轮3-3圆弧限位滑槽最右端(即下端),即在外骨骼机器人侧视图方向看膝关节远端滑轮3-3圆弧限位滑槽在穿戴者的前侧方向;膝关节远端滑轮3-3另一侧与扭矩传感器3-4通过螺栓同轴固定连接,小腿连接件3-5圆环外侧与膝关节后外壳3-2-2内部两个轴承同轴转动连接,膝关节后外壳3-2-2安装两个轴承的中间设有限位圆环,用于将两个轴承隔开,限位两侧圆孔分别与轴承同轴固定连接;小腿连接件3-5圆环内侧有上下两个限位,与扭矩传感器3-4外环上下水平面平行,扭矩传感器3-4外尺寸略小于或等于小腿连接件3-5圆环内侧尺寸,可将扭矩传感器3-4放置于小腿连接件3-5圆环内部,通过螺栓将扭矩传感器3-4与小腿连接件3-5固定连接,膝关节前外壳3-2-1与膝关节后外壳3-2-2通过螺栓固定连接,膝关节前外壳3-2-1与膝关节后外壳3-2-2通过台阶配合形成完整光滑半圆环,小腿连接件3-5下部通过梅花螺栓组件与自由度摆动件4-1转动连接。
50.应用上述技术方案,通过膝关节前外壳3-2-1内侧限位块与膝关节远端滑轮3-3圆弧限位滑槽接触,从而实施膝关节远端滑轮3-3顺时针方向上的限位,即当膝关节前外壳3-2-1内侧限位块与膝关节远端滑轮3-3圆弧限位滑槽接触时,抵住膝关节远端滑轮3-3,使其最大转动角度状态为人体直立状态与膝关节弯曲最大状态;膝关节远端滑轮3-3外环面设有弧形绕线槽,能够遮住鲍登绳6-4且使鲍登绳6-4与膝关节远端滑轮3-3贴合紧密,防止膝关节远端滑轮3-3外环面弧形绕线槽内的鲍登绳6-4脱离膝关节远端滑轮3-3;膝关节远端滑轮3-3外环面有一凸起绳索固定台,鲍登绳6-4穿过此绳索固定台缠绕膝关节远端滑轮3-3,在此绳索固定台通过螺栓拧紧抵住鲍登绳6-4,使鲍登绳6-4与膝关节远端滑轮3-3固定连接,从而通过鲍登绳6-4的拉力带动膝关节转动。通过采用上述技术方案,膝关节限位块及限位滑槽实现了下肢外骨骼在膝关节处的弯曲和伸展,符合人体膝关节弯曲和伸展的角度需求,防止穿戴者膝关节的过度弯曲和伸展造成运动损伤,保护穿戴者的膝关节健康;膝关节编码器能够测量小腿板相对于大腿板的转动角度,即穿戴者小腿相对于大腿的转动角度,膝关节扭矩传感器能够测量鲍登绳施加给膝关节远端滑轮的拉力,控制系统可通过膝关节编码器、膝关节扭矩传感器获取穿戴者的运动状态和运动意图,为下肢外骨骼的控制做好准备,对患者进行辅助康复训练。
51.可选地,所述膝关节绕线模块3还包括膝关节插拔组件和/或膝关节线管固定组件;所述膝关节插拔组件包括膝关节插拔外壳3-6-1、膝关节插拔卡扣3-6-3、弹簧3-6-4、膝关节插拔卡扣帽3-6-5;其中,膝关节插拔外壳3-6-1与膝关节前外壳3-2-1固定连接,膝关节插拔卡扣3-6-3穿过膝关节插拔外壳3-6-1与膝关节插拔卡扣帽3-6-5固定连接,弹簧3-6-4固定在膝关节插拔卡扣3-6-3与膝关节插拔外壳3-6-1之间;通过膝关节插拔组件与大腿绑缚模块2中大腿板2-1固定连接;所述膝关节线管固定组件包括膝关节线管固定块、膝关节线管连接头;其中,膝关节前外壳3-2-1上部及膝关节线管固定块设有槽孔,将膝关节线管连接头放置槽孔中,膝关节线管固定块与膝关节前外壳3-2-1固定连接,使得膝关节线管连接头固定在膝关节前外壳3-2-1与膝关节线管固定块之间。
52.具体而言,如图3-图5所示,膝关节插拔组件包括膝关节插拔外壳3-6-1、膝关节插拔滑盖3-6-2、膝关节插拔卡扣3-6-3、弹簧3-6-4、膝关节插拔卡扣帽3-6-5,膝关节线管固定组件包括膝关节线管固定块、膝关节线管连接头,膝关节线管固定块包括膝关节左线管
固定块3-7-1-1以及膝关节右线管固定块3-7-1-2,膝关节线管连接头包括膝关节左线管连接头3-7-2-1以及膝关节右线管连接头3-7-2-2;其中,膝关节插拔外壳3-6-1与膝关节前外壳3-2-1通过螺栓固定连接,膝关节插拔滑盖3-6-2与膝关节插拔外壳3-6-1底部滑槽滑动连接,膝关节插拔卡扣3-6-3依次穿过膝关节插拔外壳3-6-1一侧方形孔和另一侧圆形孔与膝关节插拔卡扣帽3-6-5通过螺栓固定连接,弹簧3-6-4一侧放置在膝关节插拔卡扣3-6-3圆形凸柱外环、另一侧放置在膝关节插拔外壳3-6-1内部圆形凸柱外环,弹簧3-6-4固定在膝关节插拔卡扣3-6-3与膝关节插拔外壳3-6-1之间;膝关节前外壳3-2-1上部及膝关节线管固定块设有半弧形槽,膝关节线管连接头中间有一略大的圆环,圆环恰好可放置在膝关节前外壳3-2-1上部及膝关节线管固定块的半弧形槽内,膝关节线管固定块与膝关节前外壳3-2-1固定连接,使得膝关节线管连接头固定在膝关节前外壳3-2-1与膝关节线管固定块之间;膝关节插拔组件与大腿板2-1固定连接,为可拆卸结构。
53.应用上述技术方案,向外拉膝关节插拔卡扣帽3-6-5,带动膝关节插拔卡扣3-6-3向外移动,压缩膝关节插拔卡扣3-6-3与膝关节插拔外壳3-6-1之间的弹簧3-6-4,弹簧3-6-4蓄能,膝关节前外壳3-2-1上部凹槽完全露出,将大腿板2-1下端插入膝关节前外壳3-2-1上部凹槽内,此时膝关节插拔卡扣3-6-3、大腿板2-1下端方形槽和膝关节前外壳3-2-1内部方形槽中心水平对齐,且膝关节插拔卡扣3-6-3末端方形尺寸小于大腿板2-1下端方形槽和膝关节前外壳3-2-1内部方形槽,松开膝关节插拔卡扣帽3-6-5,压缩后的弹簧3-6-4释放能力,挤压膝关节插拔卡扣3-6-3依次穿过大腿板2-1下端方形槽和膝关节前外壳3-2-1内部方形槽,将大腿板2-1与膝关节绕线模块3固定连接。拆卸方式与上述同理。通过采用上述技术方案,可将大腿绑缚模块与膝关节绕线模块快速安装拆卸,便于康复训练外骨骼机器人收纳整理,减小空间占用率。
54.可选地,如图6所示,所述小腿可调结构4包括自由度摆动件4-1、梅花螺栓组件以及小腿连接轴4-3;其中,梅花螺栓组件包括梅花螺栓4-2-1、梅花螺母4-2-2;自由度摆动件4-1一端通过梅花螺栓组件与小腿连接件3-5转动连接,自由度摆动件4-1另一端通过小腿连接轴4-3及e形卡簧与小腿板5-1转动连接。
55.通过采用上述技术方案,在膝关节结构与小腿绑缚结构之间增加了两个自由度,可以根据不同穿戴者腿型的进行调节从而使下肢外骨骼机器人与人体腿部更加贴合,还实现了下肢外骨骼在膝关节处内翻或外翻的自由度,符合人体膝关节处内翻或外翻自由度的需求,增加了运动的柔顺性与灵活性,防止运动过程中受伤。
56.可选地,如图6所示,所述小腿绑缚模块5包括小腿板5-1以及小腿绑缚组件;其中,小腿绑缚组件包括小腿绑缚固定块5-2-1、小腿绑缚调节块5-2-2、小腿绑缚连接块5-2-3;小腿绑缚固定块5-2-1与小腿板5-1固定连接,小腿绑缚固定块5-2-1两侧分别布置依次连接的多个小腿绑缚调节块5-2-2,位于端部的小腿绑缚调节块5-2-2与小腿绑缚连接块5-2-3转动连接,小腿板5-1一端与小腿可调结构4固定连接,小腿板5-1另一端与为自由端。
57.具体实施方式与上述大腿绑缚模块相同。
58.可选地,所述动力系统模块6包括电源组件6-1、电机组件6-2、腰部绕线轮组件、鲍登绳6-4、腰部外壳、腰部挂钩6-6;其中,腰部外壳包括腰部前盖6-5-1与腰部后盖6-5-2,腰部挂钩6-6与腰部后盖6-5-2通过螺栓固定连接,电源6-1放置于腰部后盖6-5-2卡槽中固定,电机组件6-2的定子与腰部后盖6-5-2固定连接,电机组件6-2的转子与腰部绕线轮组件
同轴固定连接;鲍登绳6-4依次绕过腰部绕线轮组件、绕过膝关节绕线模块3中膝关节远端滑轮3-3后回到动力系统模块6中与鲍登绳6-4首尾相接固定。
59.通过采用上述技术方案,电源放置于腰部外壳的卡槽内,便于进行电源的更换,方便快捷;外壳后部安装有腰部挂钩,若不想将腰部动力结构放置在移动支撑架上或移动支撑架不在身边或损坏的情况下,可使用腰部挂钩将腰部结构放置在腰带上,实现外骨骼机器人的分离布置与组合安装,多种使用方案应对各种情况,使用灵活。
60.可选地,所述腰部绕线轮组件包括腰部绳索固定块6-3-1、腰部绕线轮6-3-2、腰部绕线轮第一端盖6-3-3、腰部绕线轮第二端盖6-3-4、腰部线管连接头、腰部线管固定块;其中,腰部绕线轮6-3-2与电机组件6-2的转子同轴固定连接,腰部绳索固定块6-3-1与腰部绕线轮6-3-2固定连接,腰部绕线轮第一端盖6-3-3及腰部绕线轮第二端盖6-3-4与电机组件6-2的定子固定连接,腰部绕线轮第二端盖6-3-4一侧及腰部线管固定块设有槽孔,将腰部线管连接头放置其槽孔中,腰部线管固定块与腰部绕线轮第二端盖固定连接,使得腰部线管连接头固定在腰部绕线轮第二端盖6-3-4与腰部线管固定块之间;所述腰部线管连接头包括腰部左线管连接头6-3-5-1以及腰部右线管连接头6-3-5-2,腰部线管固定块包括腰部左线管固定块6-3-6-1以及腰部右线管固定块6-3-6-2;鲍登绳6-4依次绕过腰部绕线轮6-3-2、穿过腰部右线管连接头6-3-5-2、绕过膝关节远端滑轮3-3、穿过腰部右线管连接头6-3-5-1、绕回腰部绕线轮6-3-2后首尾连接并与腰部绳索固定块6-3-1固定连接。
61.具体而言,如图7、图9、图11-图14所示,腰部绕线轮6-3-2与电机组件6-2的转子通过螺栓同轴固定连接,腰部绳索固定块6-3-1与腰部绕线轮6-3-2通过螺栓固定连接,腰部绕线轮第一端盖6-3-3及腰部绕线轮第二端盖6-3-4与电机组件6-2的定子固定连接,腰部绕线轮第一端盖6-3-3及腰部绕线轮第二端盖6-3-4形成的内部圆环直径略大于腰部绕线轮6-3-2外直径,腰部绕线轮6-3-2位于腰部绕线轮第一端盖6-3-3及腰部绕线轮第二端盖6-3-4形成的内部圆环内;腰部绕线轮第二端盖6-3-4设有两个长通孔,通孔直径大于腰部线管连接头细头部外径;腰部绕线轮第二端盖6-3-4底部及腰部线管固定块设有半弧形槽,腰部线管连接头中间有一略大的圆环,圆环恰好可放置在腰部绕线轮第二端盖6-3-4底部及腰部线管固定块的半弧形槽内,腰部绕线轮第二端盖6-3-4与腰部线管固定块固定连接,使得腰部线管连接头固定在腰部绕线轮第二端盖6-3-4与腰部线管固定块之间。腰部绕线轮6-3-2外环面设有弧形绕线槽,尺寸略大于鲍登绳6-4,能够遮住鲍登绳6-4,腰部绳索固定块6-3-1内部正中有一方形槽,两侧为弧形槽,且方形槽宽度大于弧形槽宽度,便于鲍登绳6-4穿过,并使鲍登绳6-4首尾端通过鲍登绳铝套夹紧固定连接后,夹紧后的铝套卡在方形槽内,腰部绳索固定块6-3-1外部弧形面设有螺纹孔,通过螺栓穿过螺纹孔将鲍登绳6-4与腰部绕线轮6-3-2夹紧,使得电机6-2工作时带动腰部绕线轮6-3-2将拉力传递给鲍登绳6-4。
62.可选地,所述腰部线管固定块内部沿轴向方向设有多个弧形槽。如图10中,腰部线管固定块内部设有三个弧形槽,可根据鲍登绳6-4的长度选择合适且可达到鲍登绳6-4紧绷状态的弧形槽放置安装。
63.通过采用上述技术方案,腰部绳索固定块6-3-1及腰部线管固定块的设计都为实现整体下肢外骨骼鲍登绳的紧绷状态,解决了现有的绳驱动外骨骼鲍登绳整体松弛不能完全贴合绕线轮的情况,避免了在运动过程中鲍登绳转动挤压损坏的情况,降低了运动数据
采集的误差。
64.可选地,所述动力系统模块6还包括第一鲍登绳线管6-7和第二鲍登绳线管6-8,所述第一鲍登绳线管6-7一端与腰部右线管连接头6-3-5-2挤压夹紧固定连接、另一侧与膝关节左线管连接头3-7-2-1挤压夹紧固定连接,第二鲍登绳线管6-8一端与腰部右线管连接头6-3-5-1挤压夹紧固定连接、另一侧与膝关节左线管连接头3-7-2-2挤压夹紧固定连接;鲍登绳6-4依次绕过腰部绕线轮6-3-2、穿过腰部绕线轮第二端盖6-3-4、穿过腰部右线管连接头6-3-5-2、穿过第一鲍登绳线管6-7、穿过膝关节左线管连接头3-7-2-1、穿过膝关节前外壳3-2-1、绕过膝关节远端滑轮3-3、再返程穿过膝关节前外壳3-2-1、穿过膝关节左线管连接头3-7-2-2、穿过第二鲍登绳线管6-8、穿过腰部右线管连接头6-3-5-1、穿过腰部绕线轮第二端盖6-3-4、绕回腰部绕线轮6-3-2后在腰部绳索固定块6-3-1内部首尾端通过鲍登绳铝套夹紧固定连接。
65.具体而言,鲍登绳6-4依次穿过各零件回到腰部绕线轮6-3-2处通过螺栓与腰部绕线轮6-3-2固定连接,形成鲍登绳的双向绳驱动;同时,鲍登绳6-4在膝关节远端滑轮3-3处通过螺栓与膝关节远端滑轮3-3固定连接;电机组件6-2开始工作带动腰部绕线轮6-3-2转动,腰部绕线轮6-3-2将力传递给鲍登绳6-4,鲍登绳6-4带动膝关节远端滑轮3-3转动,膝关节远端滑轮3-3将力传递给扭矩传感器3-4,进而通过扭矩传感器3-4传递给小腿连接件3-5,小腿连接件3-5通过小腿可调结构4带动小腿板5-1转动,从而带动穿戴者小腿进行屈膝和伸膝。
66.通过采用上述技术方案,使用鲍登绳采取绳驱动方式,大大降低整体外骨骼机器人的重量,具有结构简单、小巧轻便、传递更加柔性力的特点;采用双向绳驱动,可实现穿戴者在运动过程中伸膝、屈膝都会提供助力的情况,更有利于下肢运动障碍患者的康复训练。
67.可选地,如图8所示,所述移动支撑架模块7包括支撑架主体7-1、距离探测器7-2、支撑架前轮7-3、支撑架后轮7-4、后轮固定块7-5、移动支撑架后轮电机7-6、移动支撑架电源7-7;距离探测器7-2与支撑架主体7-1通过螺栓固定连接,支撑架前轮7-3与支撑架主体7-1固定连接,后轮固定块7-5与支撑架主体7-1固定连接,支撑架后轮7-4与后轮固定块7-5一端固定连接,移动支撑架后轮电机7-6与后轮固定块7-5另一端固定连接,移动支撑架电源7-7放置于支撑架主体7-1底部卡槽内固定。
68.具体而言,距离探测器7-2可识别与前方人体的距离,在穿戴者运动过程中,通过探测与人体距离从而控制移动支撑架后轮电机7-6转动速度,使移动支撑架与人体保持一定的距离,实现移动支撑架的视觉跟随;将腰部动力系统模块6放置在移动支撑架7上的卡槽内,实现下肢外骨骼机器人的分离布置。
69.通过采用上述技术方案,将腰部较重的能源动力系统从人体上转移至支撑架上,实现外骨骼机器人的动力系统与被控系统分离,减小了人体的负重,给患者减轻了身体负担,同时,移动支撑架实现了视觉跟随技术,可自主跟随人体移动,轻捷方便,实现在无人辅助下自主康复训练。
70.上面结合附图对本实用新型的具体实施方式作了详细说明,但是本实用新型并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1