多角度旋转模组的制作方法
1.本实用新型涉及自动化技术领域,涉及一种多角度旋转模组。
背景技术:
2.多角度的旋转现在比较多的是采用六轴机械臂,五轴旋转模组实现,这样成本会比较高且需要的空间会很大,对于小零件的检测等不是很适用,六轴机械臂,五轴旋转模组不仅占用的空间比较大,而且成本会比较高,若元件的角度调整采用人工调整,不仅劳动强度大,精度低,操作起来也比较麻烦。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种带动元件在空间内进行位姿调整,可以运用在对空间有局限要求的位置,调整方便的多角度旋转模组。
4.为了解决上述技术问题,本实用新型解决其技术问题所采用的技术方案是:
5.一种多角度旋转模组,包括:
6.第一移动组件,设置于机架上,所述第一移动组件与第一滑动块驱动连接;
7.第二移动组件,设置于所述第一滑动块上,所述第二移动组件与所述第一移动组件垂直设置,所述第二移动组件与第二滑动块驱动连接:
8.旋转组件,设置于所述第二滑动块上,所述旋转组件与旋转台驱动连接;
9.定位组件,设置于所述旋转台上,所述旋转组件带动旋转台上的定位组件进行转动以对定位组件上的工件进行位姿调整。
10.进一步地,所述第二移动组件包括固定板,所述固定板设置于所述第一滑动块上,所述固定板上设置有固定轨道,所述固定轨道上设置有轨道槽,所述第二滑动块滑设在所述轨道槽上,所述固定板上设置有第二电机,所述第二电机通过第二丝杆与所述第二滑动块驱动连接,所述第二电机用于带动所述第二滑动块沿着所述固定轨道往复运动。
11.进一步地,所述第一移动组件包括基座,所述基座上设置有第一滑轨,所述第一滑轨与所述基座为一体成型结构,所述第一滑动块滑设在所述第一滑轨上,所述基座一端设置有动力部件,所述动力部件与所述第一滑动块驱动连接,所述动力部件用于带动所述第一滑动块沿着所述第一滑轨往复运动。
12.进一步地,所述动力部件包括第一电机,所述第一电机通过连接座与所述基座连接,所述第一电机的输出轴与第一丝杆驱动连接,所述第一丝杆通过安装座设置于所述基座上,所述第一丝杆上设置有第一螺母,所述第一螺母设置于第一滑动块上。
13.进一步地,所述基座上设置有多个槽型光电开关,且所述槽型光电开关依次设置于所述第一滑轨与所述第一丝杆之间,所述第一螺母上设置有与所述槽型光电开关相匹配的挡片。
14.进一步地,所述定位组件包括定位块,所述定位块上设置有多个定位槽,所述定位槽上设置有真空吸盘。
15.进一步地,所述定位块上设置有挡料片,所述旋转组件上设置有检测传感器,所述挡料片与所述检测传感器相对设置。
16.进一步地,所述旋转组件包括第一旋转部件和第二旋转部件,所述第二滑动块上设置有支撑架,所述第二旋转部件设置于所述支撑架上,所述第一旋转部件上设置有旋转板,所述第二旋转部件设置于所述旋转板上,所述第二旋转部件与所述旋转台驱动连接,所述第一旋转部件的旋转中心与第二旋转部件的旋转中心垂直设置,所述第一旋转部件和第二旋转部件用于带动工件在空间内运动以进行位姿调整。
17.进一步地,所述第一旋转部件包括安装座,所述安装座上转设有旋转齿轮,所述安装座上设置有旋转电机,所述旋转电机的输出轴上设置有传动蜗杆,所述传动蜗杆转设在所述安装座上,所述传动蜗杆与所述旋转齿轮啮合,所述旋转齿轮上设置有旋转盘,所述旋转板垂直设置在所述旋转盘上;所述旋转盘边缘设置有旋转刻度,所述安装座上设置有与所述旋转刻度相匹配的旋转标记,所述旋转电机用于驱动传动蜗杆转动来带动旋转齿轮上的旋转盘转动。
18.进一步地,所述第二旋转部件包括转动电机,所述转动电机设置于所述旋转板上,所述转动电机的输出轴为中空转轴,所述中空转轴一端设置有气阀,另一端与所述定位组件连接,所述转动电机上设置有固定架,所述固定架上设置有与所述气阀相匹配的卡槽,所述气阀端部卡设在所述卡槽内。
19.本实用新型的有益效果:
20.本实用新型的第一移动组件与第一滑动块驱动连接,第二移动组件与第二滑动块驱动连接,旋转组件带动旋转台上的定位组件进行转动以对定位组件上的工件进行位姿调整,以此带动元件在空间内进行位姿调整,整体角度可以根据自己的需要进行调整,从而达到旋转后的角度,移动到需要位置角度;第一移动组件第二移动组件以及旋转组件可以对元件进行多个方位的同时调整,可以运用在对空间有局限要求的位置,或者需要多个角度的变化等情况,操作简单,调整方便。
附图说明
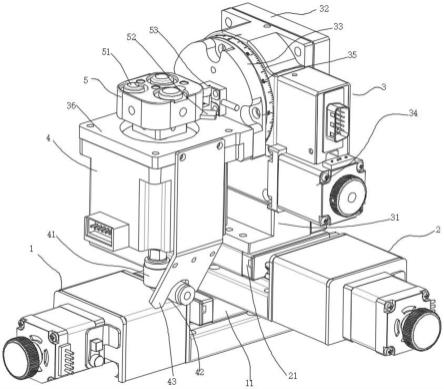
21.图1是本实用新型的一种多角度旋转模组示意图。
22.图2是本实用新型的第一移动组件示意图。
23.图3是本实用新型的第一移动组件剖视图。
24.图4是本实用新型的第一旋转部件剖视图。
25.图中标号说明:1、第一移动组件;11、第一滑动块;12、基座;13、第一滑轨;14、第一电机;15、第一丝杆;16、第一螺母;17、挡片;2、第二移动组件;21、第二滑动块;3、旋转组件;31、支撑架;32、安装座;33、旋转盘;34、旋转电机;35、旋转刻度;36、旋转板;37、传动蜗杆;38、旋转齿轮;4、转动电机;41气阀;42、固定架;43、卡槽;5、定位块;51、真空吸盘;52、挡料片;53、检测传感器。
具体实施方式
26.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
27.参照图1-4所示,一种多角度旋转模组,包括:
28.第一移动组件1,设置于机架上,所述第一移动组件1与第一滑动块11驱动连接;
29.第二移动组件2,设置于所述第一滑动块11上,所述第二移动组件2与所述第一移动组件1垂直设置,所述第二移动组件2与第二滑动块21驱动连接:
30.旋转组件3,设置于所述第二滑动块21上,所述旋转组件3与旋转台驱动连接;
31.定位组件,设置于所述旋转台上,所述旋转组件3带动旋转台上的定位组件进行转动以对定位组件上的工件进行位姿调整。
32.本实用新型的第一移动组件1与第一滑动块11驱动连接,第二移动组件2与第二滑动块21驱动连接,旋转组件3带动旋转台上的定位组件进行转动以对定位组件上的工件进行位姿调整,以此带动元件在空间内进行位姿调整,整体角度可以根据自己的需要进行调整,从而达到旋转后的角度,移动到需要位置角度;第一移动组件1、第二移动组件2以及旋转组件3可以对元件进行多个方位的同时调整,可以运用在对空间有局限要求的位置,或者需要多个角度的变化等情况,操作简单,调整方便。
33.本实用新型结构简单,小巧灵便,成本低廉,仅使用一个动力(第一移动组件1第二移动组件2以及旋转组件3)实现联动推边,此机构可以运用在对空间有局限要求的位置,或者需要多个角度的变化等情况,通过常用的模组,实现第一移动组件1第二移动组件2在平面方向移动,通过旋转组件3摆动实现整体模组的旋转,可以节省旋转时的空间,整体角度可以根据自己的需要进行调整,从而达到旋转后的角度,移动到需要位置角度。
34.本实用新型实现了有限的空间内多角度的转变。而且此种结构,通过常用的模组搭配电机模组实现,空间占用小,成本比较低。
35.进一步地,所述第二移动组件2包括固定板,所述固定板设置于所述第一滑动块11上,所述固定板(相当于基座)上设置有固定轨道(相当于第一滑轨),所述固定轨道上设置有轨道槽,所述第二滑动块21滑设在所述轨道槽上,所述固定板上设置有第二电机(相当于第一电机),所述第二电机通过第二丝杆(相当于第一丝杆)与所述第二滑动块21驱动连接,所述第二电机用于带动所述第二滑动块21沿着所述固定轨道往复运动。
36.具体的,第二电机用于带动所述第二滑动块21沿着所述固定轨道往复运动,整体角度可以根据自己的需要进行调整,从而达到旋转后的角度,移动到需要位置角度,其可多个方位的同时调整,操作简单,调整方便。
37.进一步地,第一移动组件1、第二移动组件2的结构完全相同;所述第一移动组件1包括基座12,所述基座12上设置有第一滑轨13,所述第一滑轨13与所述基座12为一体成型结构,所述第一滑动块11滑设在所述第一滑轨13上,所述基座12一端设置有动力部件,所述动力部件与所述第一滑动块11驱动连接,所述动力部件用于带动所述第一滑动块11沿着所述第一滑轨13往复运动。
38.具体的,动力部件带动所述第一滑动块11沿着所述第一滑轨13往复运动,带动定位块上的元件在第二滑动块21带动的平面上进行位置调整,减少调节元件位姿的时间,提高调整的效率,同时也能保证元件位姿调整的精确度。
39.进一步地,所述动力部件包括第一电机14,所述第一电机14通过连接座与所述基座12连接,所述第一电机14的输出轴与第一丝杆15卡槽驱动连接,所述第一丝杆15卡槽通过安装座32设置于所述基座12上,所述第一丝杆15卡槽上设置有第一螺母16,所述第一螺
母16设置于第一滑动块11上。
40.具体的,第一电机14带动第一丝杆15卡槽转动来带动第一滑动块11沿着第一滑轨13于东,方便传输,输送精度高,使用起来更加的方便。
41.进一步地,所述基座12上设置有多个槽型光电开关,且所述槽型光电开关依次设置于所述第一滑轨13与所述第一丝杆15卡槽之间,所述第一螺母16上设置有与所述槽型光电开关相匹配的挡片17。
42.具体的,第一螺母16上设置有与所述槽型光电开关相匹配的挡片17,使得滑动块的移动可以被槽型光电开关检查挡片17位置来获得,避免滑动块移动超限,保证第二滑动块21移动的精度。
43.进一步地,所述定位组件包括定位块,所述定位块上设置有多个定位槽,所述定位槽上设置有真空吸盘。
44.具体的,定位块上的真空吸盘将元件进行吸取后,实现旋转的过程中产品被吸住,不会因为第一移动组件1和第二移动组件2带动元件的移动,以及角度的变化导致产品移动。
45.进一步地,所述定位块上设置有挡料片,所述旋转组件3上设置有检测传感器,所述挡料片与所述检测传感器相对设置。
46.具体的,挡料片与所述检测传感器相对设置,通过检测传感器来检测到挡料片的设置,确定定位块转动的角度,保证元件调整的精度。
47.进一步地,所述旋转组件3包括第一旋转部件和第二旋转部件,所述第二滑动块21上设置有支撑架31,所述第二旋转部件设置于所述支撑架31上,所述第一旋转部件上设置有旋转板36,所述第二旋转部件设置于所述旋转板36上,所述第二旋转部件与所述旋转台驱动连接,所述第一旋转部件的旋转中心与第二旋转部件的旋转中心垂直设置,所述第一旋转部件和第二旋转部件用于带动工件在空间内运动以进行位姿调整。
48.具体的,第一旋转部件的旋转中心与第二旋转部件的旋转中心垂直设置,第一旋转部件和第二旋转部件用于带动工件在空间内运动以进行位姿调整,可实现目标物在空间中的位姿调整,特别适用于在对空间有局限要求的位置,或者需要多个角度的变化的情形,结构简单,操作便捷。
49.进一步地,所述第一旋转部件包括安装座32,所述安装座32上转设有旋转齿轮38,所述安装座32上设置有旋转电机34,所述旋转电机34的输出轴上设置有传动蜗杆37,所述传动蜗杆37转设在所述安装座32上,所述传动蜗杆37与所述旋转齿轮38啮合,所述旋转齿轮38上设置有旋转盘33,所述旋转板36垂直设置在所述旋转盘33上;所述旋转盘33边缘设置有旋转刻度35卡槽,所述安装座32上设置有与所述旋转刻度35卡槽相匹配的旋转标记,所述旋转电机34用于驱动传动蜗杆37转动来带动旋转齿轮38上的旋转盘33转动。
50.具体的,安装座32上设置有与所述旋转刻度35卡槽相匹配的旋转标记,可以直观的看到旋转盘33转动角度,保证转动角度的精度,旋转电机34驱动传动蜗杆37转动来带动旋转齿轮38上的旋转盘33转动,带动元件在空间内进行位姿调整,旋转盘33上的旋转刻度35卡槽可以块达到旋转后的角度,第一移动组件1和第二移动组件2带动元件移动到需要位置角度
51.进一步地,所述第二旋转部件包括转动电机4,所述转动电机4设置于所述旋转板
36上,所述转动电机4的输出轴为中空转轴,所述中空转轴一端设置有气阀,另一端与所述定位组件连接,所述转动电机4上设置有固定架,所述固定架上设置有与所述气阀相匹配的卡槽,所述气阀端部卡设在所述卡槽内。
52.具体的,中空转轴上设置气阀,另一端与定位块连接,来对定位块上的真空吸盘提供负压,减少定位块上使用气阀或者气管,避免影响元件的翻转调整,调整精度更好,动电机带动定位块转动,带动元件在空间内进行位姿调整,整体角度可以根据自己的需要进行调整。
53.使用过程:
54.定位块上的真空吸盘将元件进行吸取后,第二电机带动第二滑动块21沿着所述固定轨道运动,第一电机14带动所述第一滑动块11沿着第一滑轨13运动,由于第二移动组件2与所述第一移动组件1垂直设置,使得第一滑动块11与第二滑动块21的移动方向垂直,带动定位块上的元件在第二滑动块21带动的平面上进行位置调整,旋转电机34驱动传动蜗杆37转动来带动旋转齿轮38上的旋转盘33转动,旋转盘33转动带动第二旋转部件以及其上的定位块进行转动,转动电机4带动定位块转动,由于第一旋转部件的旋转中心与第二旋转部件的旋转中心垂直设置,带动元件在空间内进行位姿调整,整体角度可以根据自己的需要进行调整,从而达到旋转后的角度,移动到需要位置角度。
55.以上所述实施例仅是为充分说明本实用新型而所举的较佳的实施例,本实用新型的保护范围不限于此。本技术领域的技术人员在本实用新型基础上所作的等同替代或变换,均在本实用新型的保护范围之内。本实用新型的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1