一种用于全自动固相萃取仪机械臂运动精度的控制方法与流程
1.本发明属于核素分离装备技术领域,具体为一种用于全自动固相萃取仪机械臂运动精度的控制方法。
背景技术:
2.放射性核素是环境监测、流出物监测中重点关注的核素,因此,按照相关的标准规范,各个环境监测站、核电站都需对其中重点关注的放射性核素(锕系核素、90sr等)进行定期监测。现有关于放射性核素的分析方法多采用手动操作,需进行多次手动添加试剂及分离设备操作等繁琐步骤,尤其针对活度较高的样品分析,手动操作可能造成分析人员不必要的辐射危害,不利于目前核工业所需的对放射性核素大量分析难题的解决。在市场需求的背景下自动化固相萃取仪应用而生。
3.全自动固相萃取仪的诞生解放了依靠人工手动的实验方式,提高了实验效率的同时减少了人员接收放射性照射的风险。然而目前对于很多应用而言,需要对每个实验步骤的处理液进行分类回收,以便于将来分析实验数据,目前处理这种方式用的最多的方法是通过电磁阀切换液体流通通道,从而达到每个步骤的处理液流入不同的收集瓶,然而这种方式使得每个步骤的处理液残留,而且无法每次对液路中的部件与管路进行更换,对于微含量的检测样品来说无疑是无法接受的,交叉感染的弊端使得实验结果无法科学呈现。
技术实现要素:
4.为解决现有技术存在的缺陷,本发明的目的在于提供一种用于全自动固相萃取仪机械臂运动精度的控制方法,使用该方法能够使层析柱流出液体全部精准流入对应收集瓶中。
5.为达到以上目的,本发明采用的一种技术方案是:
6.一种用于全自动固相萃取仪机械臂运动精度的控制方法,所述机械臂包括x轴机械臂和y轴机械臂,所述x轴机械臂用于移动收集瓶架以达到切换收集瓶的目的,所述y轴机械臂用于上下调节层析柱与收集瓶口的相对距离,所述x轴机械臂和y轴机械臂均采用精密电机控制精密导轨运动的控制方式;
7.所述方法包括以下步骤:
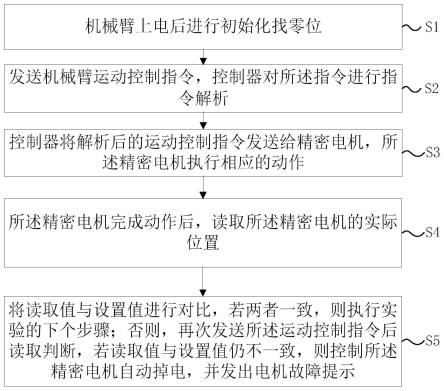
8.s1、机械臂上电后进行初始化找零位;
9.s2、发送机械臂运动控制指令,控制器对所述指令进行指令解析;
10.s3、控制器将解析后的运动控制指令发送给精密电机,所述精密电机执行相应的动作;
11.s4、所述精密电机完成动作后,读取所述精密电机的实际位置;
12.s5、将读取值与设置值进行对比,若两者一致,则执行实验的下个步骤;否则,再次发送所述运动控制指令后读取判断,若读取值与设置值仍不一致,则控制所述精密电机自动掉电,并发出电机故障提示。
13.进一步,如上所述的用于全自动固相萃取仪机械臂运动精度的控制方法,所述x轴机械臂和y轴机械臂均为线性模组,所述线性模组将步进电机、滚珠丝杆、直线导轨滑台集成为一体。
14.进一步,如上所述的用于全自动固相萃取仪机械臂运动精度的控制方法,所述收集瓶架固定在所述x轴机械臂的直线导轨滑台上,多个收集瓶安装在所述收集瓶架上。
15.进一步,如上所述的用于全自动固相萃取仪机械臂运动精度的控制方法,所述层析柱固定在所述y轴机械臂的直线导轨滑台上。
16.进一步,如上所述的用于全自动固相萃取仪机械臂运动精度的控制方法,步骤s1具体为:所述精密电机带动精密导轨通过往复运动寻找零位开关,待所述精密电机检测到零位传感器后停止运动并完成初始化,同时默认该位置为零位。
17.进一步,如上所述的用于全自动固相萃取仪机械臂运动精度的控制方法,步骤s2中控制器对所述指令进行指令解析具体为:确定运动方向和运动距离信息,并将运动距离转化为电机的旋转角度。
18.进一步,如上所述的用于全自动固相萃取仪机械臂运动精度的控制方法,所述精密电机的分辨率为0.014
°
。
19.进一步,如上所述的用于全自动固相萃取仪机械臂运动精度的控制方法,在所述精密导轨的最大安全运动距离起始点布置有机械开关,在精密电机失控运动接触到所述机械开关时所述精密电机自动掉电并发出故障信号。
20.采用本发明所述的用于全自动固相萃取仪机械臂运动精度的控制方法,具有以下显著的技术效果:
21.1、本发明采用机械臂运动控制方式,减少层析柱后端复杂的管路连接;
22.2、本发明通过机械臂运动选择回收瓶的方式可以有效避免低含量样品的交叉污染现象;
23.3、本发明采用y轴设计方式,可以减少液体飞溅的问题,避免回收液损失的同时可以减少清理仪器内部的工作量。
附图说明
24.图1为本发明实施例中提供的一种用于全自动固相萃取仪机械臂运动精度的控制方法流程图;
25.图2为本发明实施例中提供的另一种用于全自动固相萃取仪机械臂运动精度的控制方法流程图。
具体实施方式
26.下面结合具体的实施例与说明书附图对本发明进行进一步的描述。
27.为解决现有同类仪器存在的弊端,本发明采用精密电机控制精密导轨运动的控制方式,通过高精度的电机控制与精密导轨结合的方式,可以精确地运动毫米级别的距离,通过此运动方式带动托盘上收集瓶精确定位到所需位置。
28.本发明提供了一种用于全自动固相萃取仪机械臂运动精度的控制方法,共包含两组机械臂的控制,x轴用来移动收集瓶架以达到切换收集瓶的目的,y轴用来上下调节层析
柱与收集瓶口的相对距离。机械臂的具体结构如下:
29.x轴机械臂采用精密电机控制精密导轨运动的方式,例如将步进电机、滚珠丝杆、直线导轨滑台集成为一体的线性模组结构,x轴精密导轨上固定托盘,多个收集瓶安装在托盘中。每次收集完溶液后,x轴精密电机控制x轴精密导轨水平移动设定距离,将新的收集瓶移动到层析柱的正下方,便于下步流出液的收集。
30.y轴机械臂同样采用精密电机控制精密导轨运动的方式,例如将步进电机、滚珠丝杆、直线导轨滑台集成为一体的线性模组结构,y轴精密导轨与层析柱连接。在每步开始前,y轴精密电机控制y轴精密导轨下降设定距离,将层析柱的流出口移动至收集瓶口以下,以防流出液在排出过程中飞溅造成仪器及样品间的交叉污染;每个过柱步骤完成后,y轴精密电机控制y轴精密导轨上升设定距离,将层析柱流出口提到高于收集瓶瓶口的位置。
31.下面以x轴机械臂为例来阐述本发明所述的运动精度控制方法,图1-图2示出了该控制方法流程图,该方法包括以下步骤:
32.s1、机械臂上电后首先进行初始化找零位。
33.机械臂在上电后首先进行零位定位,精密电机带动精密导轨通过往复运动寻找零位开关,待精密电机检测到零位传感器后停止运动并完成初始化,同时默认该位置为零位。
34.s2、发送机械臂运动控制指令,控制器对该指令进行指令解析。
35.操作人员发送机械臂运动控制指令,该指令的内容包括运动方向和运动距离,控制器接收到指令后进行指令解析,从而确定运动方向,并将运动距离转化为电机的旋转角度。本实施例中,精度电机采用高精度控制模式,分辨率为0.014
°
,电机旋转一圈对应导轨运动5mm,据此比例计算,电机可以控制导轨最小移动距离为0.0002mm,对于x轴或者y轴的正反方向控制均可满足使用要求。
36.s3、控制器将解析后的运动控制指令发送给精密电机,精密电机执行相应的动作。
37.s4、精密电机完成动作后,读取精密电机的实际运动位置。
38.每次发送运动控制指令后,待电机完成动作后,发送读取电机运动位置指令,获得电机的实际运动位置。
39.s5、将读取值与设置值进行对比,若两者一致,则可执行实验的下个步骤;否则,再次发送该位置运动指令后读取判断,若两者仍不一致,则控制电机自动掉电,并发出电机故障提示。
40.y轴机械臂的控制运动原理与x轴机械臂相同。
41.此外,为防止电机控制失控带来不可预估损失,本发明在精密导轨的最大安全运动距离起始点布置有机械开关,在电机失控运动接触到机械开关时电机自动掉电并发出电机故障信号。
42.本发明提供的一种用于全自动固相萃取仪机械臂运动精度的控制方法,采用精密电机控制精密导轨运动的控制方式,通过高精度的电机控制与精密导轨结合的方式,可以精确地运动毫米级别的距离,通过此运动方式带动托盘上收集瓶精确定位到所需位置,可以减少层析柱后端复杂的管路连接;同时有效避免低含量样品的交叉污染现象;还可以减少液体飞溅的问题,避免回收液损失的同时减少清理仪器内部的工作量。
43.上述实施例只是对本发明的举例说明,本发明也可以以其它的特定方式或其它的特定形式实施,而不偏离本发明的要旨或本质特征。因此,描述的实施方式从任何方面来看
均应视为说明性而非限定性的。本发明的范围应由附加的权利要求说明,任何与权利要求的意图和范围等效的变化也应包含在本发明的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1