一种数控机床自动上料机械手臂的制作方法
本申请涉及机械手臂,尤其是涉及一种数控机床自动上料机械手臂。
背景技术:
1、在数控车床或加工中心等设备进行金属加工时,通常由人工进行上下料,生产效率低,且上下料过程中容易碰伤产品,目前,常见的上下料设备可采用龙门式结构,采用滑轮组件,也可采用机械手臂等。
2、例如专利号cn201621105053.0公开的一种学生数控机床操作用自动上下料机械手臂,包括底座,所述底座中心部位开设有凹槽,所述凹槽内垂直安装着驱动电机,所述驱动电机的转轴上通过联轴器与导线立柱固定连接,所述导向立柱上活动安装着滑座,所述导向立柱的顶部固定设置着升降气缸固定板……,该实用新型代替人工,实现了自动上料与下料工作,通过移动手爪与固定手爪上料下料……。
3、但上述专利采用的方式为气缸驱动手臂直上直下,不能进行分段调节,导致在上下料时灵活程度不足,且占用空间较大,同时在上下料时不容易把握抓持的力度导致金属件易发生局部损坏或滑脱,影响上料的效率。
技术实现思路
1、为了改善上述提到的上下料时灵活程度不足以及不容易把握抓持的力度的问题,本申请提供一种数控机床自动上料机械手臂。
2、本申请提供一种数控机床自动上料机械手臂,采用如下的技术方案:一种数控机床自动上料机械手臂,包括减速电机,所述减速电机的输出轴端连接有第一电机,所述第一电机的输出轴端连接有主臂,所述主臂的上端外侧安装有第二电机,所述第二电机的输出轴端连接有辅助臂,所述辅助臂与主臂转动连接,且辅助臂的端部安装有载盘,所述载盘的前端滑动卡接有两相互对称的移动手爪,所述移动手爪的内侧安装有接触传感部件。
3、基于上述技术特征:本申请在使用时可进行多级调节,上下料时可通过减速电机灵活调整抓持的方向,且附带有接触传感部件,在对金属件进行抓取时,可利用接触传感部件检测金属件的有无并对移动手爪抓持的力度进行实时监测,自行控制在一个相对合适的抓持力度上,尽量避免在上料时抓持的力度过大或过小导致金属件发生局部损坏或滑脱,影响上料的效率,且在上料结束后,各级旋转臂可自行旋转收缩,有效减小占用空间。
4、作为本实用新型所述数控机床自动上料机械手臂的一种优选方案,其中:所述载盘的底部安装有第三电机,所述第三电机的输出轴端固定连接有摆杆,所述摆杆的两端均铰接有弯弧连杆,所述弯弧连杆远离摆杆的一端与移动手爪铰接。
5、基于上述技术特征:第三电机为正反电机,在启动后,可驱动摆杆顺时针或逆时针转动,此时可利用弯弧连杆带动两组移动手爪在载盘上进行相互靠近或远离,以此完成抓取和放下的动作。
6、作为本实用新型所述数控机床自动上料机械手臂的一种优选方案,其中:所述接触传感部件包括接触压力传感器本体以及活动设置在所述接触压力传感器本体上端的接触滚轮,接触压力传感器本体的外侧还安装有信号发射器,且接触压力传感器本体与第三电机通过信号连接。
7、基于上述技术特征:在利用移动手爪对金属件进行抓持时,接触滚轮可与金属件接触,并通过接触压力传感器本体检测夹持力度,且通过信号发射器向第三电机发送信号,自行控制第三电机输出轴的旋转幅度,以此自行控制在一个相对合适的抓持力度上。
8、作为本实用新型所述数控机床自动上料机械手臂的一种优选方案,其中:所述减速电机的表面设置有报警器,所述报警器与接触压力传感器本体通过信号连接。
9、基于上述技术特征:当接触压力传感器本体未检测到金属件时,报警器可自动启动并提醒操作者。
10、作为本实用新型所述数控机床自动上料机械手臂的一种优选方案,其中:所述移动手爪的内侧还安装有若干平行设置的缓冲垫条,所述缓冲垫条采用硅胶条。
11、基于上述技术特征:缓冲垫条用于将移动手爪与金属件的刚性接触转化为软接触,尽量避免移动手爪与金属件发生剐蹭。
12、作为本实用新型所述数控机床自动上料机械手臂的一种优选方案,其中:所述减速电机的底部开设有导向滑槽,所述导向滑槽可与外部电动滑轨相匹配。
13、基于上述技术特征:在使用时,减速电机也可通过导向滑槽组装在外部电动滑轨上,方便平移滑动,扩大操作面积。
14、综上所述,本实用新型包括以下至少一种有益效果:
15、1.本申请在使用时可进行多级调节,上下料时可通过减速电机灵活调整抓持的方向,且附带有接触传感部件,在对金属件进行抓取时,可利用接触传感部件检测金属件的有无并对移动手爪抓持的力度进行实时监测,自行控制在一个相对合适的抓持力度上,尽量避免在上料时抓持的力度过大或过小导致金属件发生局部损坏或滑脱,影响上料的效率,且在上料结束后,各级旋转臂可自行旋转收缩,有效减小占用空间;
16、2.在利用移动手爪对金属件进行抓持时,接触滚轮可与金属件接触,并通过接触压力传感器本体检测夹持力度,且通过信号发射器向第三电机发送信号,自行控制第三电机输出轴的旋转幅度,以此自行控制在一个相对合适的抓持力度上;
17、3.缓冲垫条用于将移动手爪与金属件的刚性接触转化为软接触,尽量避免移动手爪与金属件发生剐蹭。
技术特征:
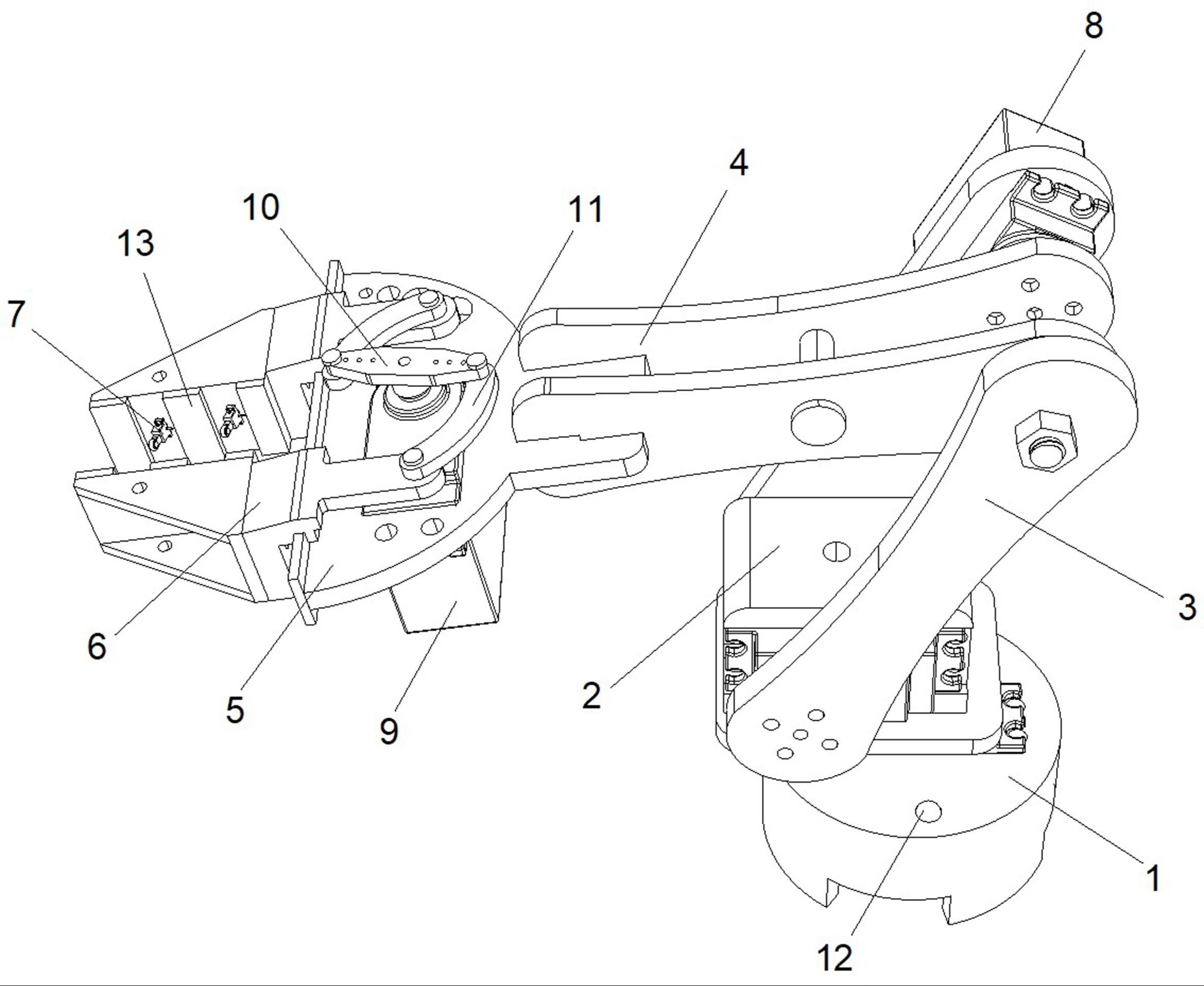
1.一种数控机床自动上料机械手臂,包括减速电机(1),其特征在于:所述减速电机(1)的输出轴端连接有第一电机(2),所述第一电机(2)的输出轴端连接有主臂(3),所述主臂(3)的上端外侧安装有第二电机(8),所述第二电机(8)的输出轴端连接有辅助臂(4),所述辅助臂(4)与主臂(3)转动连接,且辅助臂(4)的端部安装有载盘(5),所述载盘(5)的前端滑动卡接有两相互对称的移动手爪(6),所述移动手爪(6)的内侧安装有接触传感部件(7)。
2.如权利要求1所述的一种数控机床自动上料机械手臂,其特征在于:所述载盘(5)的底部安装有第三电机(9),所述第三电机(9)的输出轴端固定连接有摆杆(10),所述摆杆(10)的两端均铰接有弯弧连杆(11),所述弯弧连杆(11)远离摆杆(10)的一端与移动手爪(6)铰接。
3.如权利要求1所述的一种数控机床自动上料机械手臂,其特征在于:所述接触传感部件(7)包括接触压力传感器本体(71)以及活动设置在所述接触压力传感器本体(71)上端的接触滚轮(72),接触压力传感器本体(71)的外侧还安装有信号发射器(73),且接触压力传感器本体(71)与第三电机(9)通过信号连接。
4.如权利要求1所述的一种数控机床自动上料机械手臂,其特征在于:所述减速电机(1)的表面设置有报警器(12),所述报警器(12)与接触压力传感器本体(71)通过信号连接。
5.如权利要求1所述的一种数控机床自动上料机械手臂,其特征在于:所述移动手爪(6)的内侧还安装有若干平行设置的缓冲垫条(13),所述缓冲垫条(13)采用硅胶条。
6.如权利要求1所述的一种数控机床自动上料机械手臂,其特征在于:所述减速电机(1)的底部开设有导向滑槽(14),所述导向滑槽(14)可与外部电动滑轨相匹配。
技术总结
本申请公开了一种数控机床自动上料机械手臂,涉及机械手臂技术领域,包括减速电机,减速电机的输出轴端连接有第一电机,第一电机的输出轴端连接有主臂,主臂的上端外侧安装有第二电机,第二电机的输出轴端连接有辅助臂,移动手爪的内侧安装有接触传感部件。本申请可进行多级调节,上下料时可通过减速电机灵活调整抓持的方向,且附带有接触传感部件,对金属件进行抓取时,可利用接触传感部件检测金属件的有无并对移动手爪抓持的力度进行实时监测,自行控制在一个相对合适的抓持力度上,尽量避免在上料时抓持的力度过大或过小导致金属件发生局部损坏或滑脱,影响上料的效率,且在上料结束后,各级旋转臂可自行旋转收缩,有效减小占用空间。
技术研发人员:毛忠夫
受保护的技术使用者:杭州佳特利五金工具有限公司
技术研发日:20221026
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!