一种物流搬运用移动式机械臂
本技术涉及机器人,尤其涉及一种物流搬运用移动式机械臂。
背景技术:
1、随着社会经济发展和信息交换便捷性及范围的增大,物流行业发展速度也越来越快,通过物流搬运机器人代替人工的经济效益也相应提高,如通过电磁循迹或黑白线循迹等方式,通过搬运机器人将不同分区内的物流物品进行搬运整理。
2、现有技术中,在通过机器人机械臂对物品进行搬运时,机械臂对物品进行夹持后,在水平方向移动一段距离改变物品的位置,在机械臂夹持物品移动过程中,机械臂上的物品受到晃动,物品在机械臂上互滑动,在移动的距离较长时物品容易从机械臂上掉落。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的物品容易从机械臂上掉落的缺点,而提出的一种物流搬运用移动式机械臂。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、设计一种物流搬运用移动式机械臂,包括移动架、活动件、旋转机构、安装板、第一伸缩气缸、夹持机构和支撑机构,其中:
4、所述活动件连接至所述移动架上,所述旋转机构连接至所述活动件的底端上,所述安装板固定连接至所述旋转机构上,所述第一伸缩气缸固定连接至所述安装板上,所述夹持机构固定连接至所述第一伸缩气缸的伸缩端上,所述安装板上连接用于防止物品掉落的所述支撑机构;
5、所述支撑机构包括固定架、第三电机、第三转轴和支撑板,所述固定架固定连接至所述安装板上,所述第三电机固定连接至所述固定架上,所述第三转轴连接至所述第三电机的输出端上,所述支撑板固定连接至所述第三转轴上。
6、优选的,所述移动架包括滑槽架、第一电机、第一转轴和螺纹杆,所述第一电机固定连接至所述滑槽架上,所述第一转轴的一端固定连接至所述第一电机的输出端上,所述第一转轴的另一端固定连接至所述螺纹杆上,所述螺纹杆可转动的连接至所述滑槽架上,所述活动件可滑动的连接所述滑槽架,所述活动件上开设有螺纹孔,所述螺纹孔连接所述螺纹杆。
7、优选的,所述旋转机构包括连接轴、连接块、第一齿轮、第二电机、第二转轴和第二齿轮,所述连接轴的一端可转动的连接至所述活动件的底端上,所述连接轴的另一端固定连接至所述连接块上,所述连接块固定连接所述安装板,所述第一齿轮固定连接至所述连接轴上,所述第二电机固定连接至所述活动件上,所述第二转轴固定连接至所述第二电机的输出端上,所述第二齿轮固定连接至所述第二转轴上,所述第二齿轮啮合连接所述第一齿轮。
8、优选的,所述夹持机构包括安装架和两个对称设置的夹持组件,所述安装架固定连接至所述第一伸缩气缸的伸缩端上,两个对称设置的所述夹持组件连接至所述安装架上。
9、优选的,所述夹持组件包括第二伸缩气缸、夹板、两个平行设置的防滑垫、压力传感器和导向杆,所述第二伸缩气缸固定连接至所述安装架上,所述第二伸缩气缸的伸缩端穿过所述安装架,所述夹板固定连接至所述第二伸缩气缸的伸缩端上,两个平行设置的所述防滑垫固定连接至所述夹板上,所述压力传感器固定连接至所述夹板上,所述压力传感器位于两个平行设置的所述防滑垫之间,所述导向杆的一端固定连接至所述夹板上,所述导向杆的另一端穿过所述安装架。
10、优选的,所述防滑垫为橡胶垫。
11、本实用新型提出的一种物流搬运用移动式机械臂,有益效果在于:
12、通过夹持机构向下移动设定距离后对物品进行夹持,第三电机通电启动后带动第三转轴转动顺时针设定圈数,第三转轴带动支撑板转动,使得支撑板位于物品的底端,对夹持物品进行底端,在活动件在水平方向移动过程中,避免物品发生掉落。
技术特征:
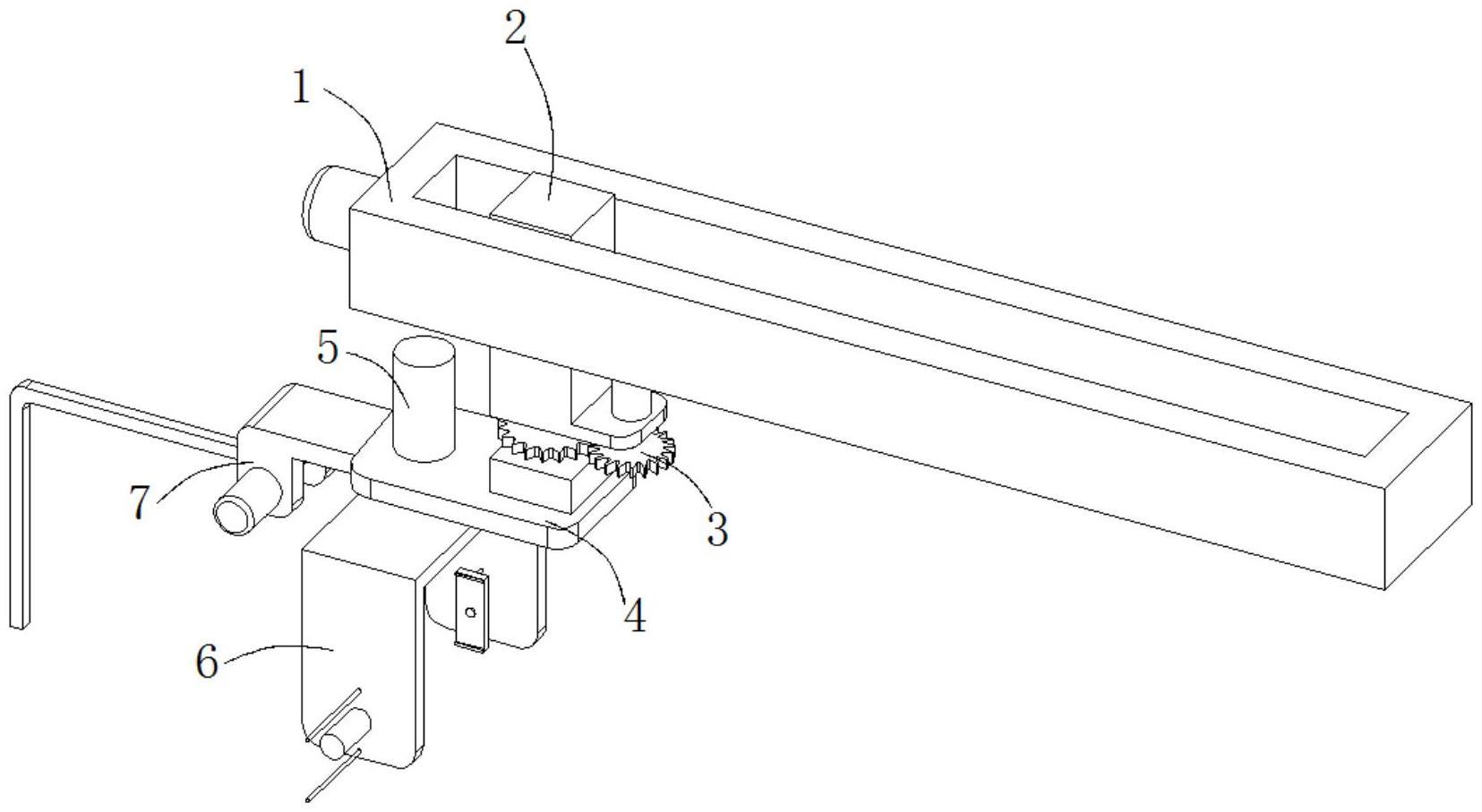
1.一种物流搬运用移动式机械臂,其特征在于,包括移动架(1)、活动件(2)、旋转机构(3)、安装板(4)、第一伸缩气缸(5)、夹持机构(6)和支撑机构(7),其中:
2.根据权利要求1所述的物流搬运用移动式机械臂,其特征在于,所述移动架(1)包括滑槽架(11)、第一电机(12)、第一转轴(13)和螺纹杆(14),所述第一电机(12)固定连接至所述滑槽架(11)上,所述第一转轴(13)的一端固定连接至所述第一电机(12)的输出端上,所述第一转轴(13)的另一端固定连接至所述螺纹杆(14)上,所述螺纹杆(14)可转动的连接至所述滑槽架(11)上,所述活动件(2)可滑动的连接所述滑槽架(11),所述活动件(2)上开设有螺纹孔,所述螺纹孔连接所述螺纹杆(14)。
3.根据权利要求1所述的物流搬运用移动式机械臂,其特征在于,所述旋转机构(3)包括连接轴(31)、连接块(32)、第一齿轮(33)、第二电机(34)、第二转轴(35)和第二齿轮(36),所述连接轴(31)的一端可转动的连接至所述活动件(2)的底端上,所述连接轴(31)的另一端固定连接至所述连接块(32)上,所述连接块(32)固定连接所述安装板(4),所述第一齿轮(33)固定连接至所述连接轴(31)上,所述第二电机(34)固定连接至所述活动件(2)上,所述第二转轴(35)固定连接至所述第二电机(34)的输出端上,所述第二齿轮(36)固定连接至所述第二转轴(35)上,所述第二齿轮(36)啮合连接所述第一齿轮(33)。
4.根据权利要求1所述的物流搬运用移动式机械臂,其特征在于,所述夹持机构(6)包括安装架(61)和两个对称设置的夹持组件(62),所述安装架(61)固定连接至所述第一伸缩气缸(5)的伸缩端上,两个对称设置的所述夹持组件(62)连接至所述安装架(61)上。
5.根据权利要求4所述的物流搬运用移动式机械臂,其特征在于,所述夹持组件(62)包括第二伸缩气缸(621)、夹板(622)、两个平行设置的防滑垫(623)、压力传感器(624)和导向杆(625),所述第二伸缩气缸(621)固定连接至所述安装架(61)上,所述第二伸缩气缸(621)的伸缩端穿过所述安装架(61),所述夹板(622)固定连接至所述第二伸缩气缸(621)的伸缩端上,两个平行设置的所述防滑垫(623)固定连接至所述夹板(622)上,所述压力传感器(624)固定连接至所述夹板(622)上,所述压力传感器(624)位于两个平行设置的所述防滑垫(623)之间,所述导向杆(625)的一端固定连接至所述夹板(622)上,所述导向杆(625)的另一端穿过所述安装架(61)。
6.根据权利要求5所述的物流搬运用移动式机械臂,其特征在于,所述防滑垫(623)为橡胶垫。
技术总结
本技术涉及机器人技术领域,尤其是一种物流搬运用移动式机械臂,第一伸缩气缸固定连接至安装板上,夹持机构固定连接至第一伸缩气缸的伸缩端上,安装板上连接用于防止物品掉落的支撑机构;支撑机构包括固定架、第三电机、第三转轴和支撑板,固定架固定连接至安装板上,第三电机固定连接至固定架上,第三转轴连接至第三电机的输出端上,支撑板固定连接至第三转轴上。本技术通过夹持机构向下移动设定距离后对物品进行夹持,第三电机通电启动后带动第三转轴转动顺时针设定圈数,第三转轴带动支撑板转动,使得支撑板位于物品的底端,对夹持物品进行底端,在活动件在水平方向移动移动过程中,避免物品发生掉落。
技术研发人员:胡泠,王思奇,王梓怡
受保护的技术使用者:辽宁理工学院
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!