抓取装置及工业机器人的制作方法
本发明涉及一种抓握而抓取工件的抓取装置及工业机器人。
背景技术:
1、在各产业界,正在开展基于自动化的省力化工作,提出了各种用于该目的的工业机器人供实际应用。在这样的工业机器人中,有的具有抓取装置,通过抓取装置抓取工件并移送至预定的位置。
2、在专利文献1中,作为工业机器人所具备的抓取装置,已知有具备掌部和一体地突出设置在掌部周围的多个(例如,5个)指部的抓取装置。专利文献1所涉及的抓取装置对形成在掌部上方的密闭空间进行减压,使掌部沿厚度方向弹性变形,通过该掌部的弹性变形使得多个指部倒向掌部的中心,从而用多个指部抓握而抓取工件。
3、现有技术文献
4、专利文献
5、专利文献1:日本专利特开2018-062038号公报
技术实现思路
1、发明要解决的课题
2、根据专利文献1的抓取装置通过作用于指部与工件的接触点的摩擦力来抓取工件,因此根据工件的种类,有时不能可靠地抓取工件。例如,锥体状、锥台状、半球状等具有倾斜面的工件难以由抓取装置抓握而抓取。另外,表面易滑(摩擦系数小)的工件也难以由抓取装置抓握而抓取。
3、本发明的目的在于提供一种能够可靠地抓握而抓取形状难以抓握的工件或表面易滑的工件的抓取装置及工业机器人。
4、用于解决课题的手段
5、根据本发明的抓取装置是用于抓握而抓取工件的抓取装置,包括可弹性变形的分隔膜、使所述分隔膜弹性变形的变形机构以及筒状的抓取部,其中,所述筒状的抓取部从所述分隔膜的周缘一体地延伸出,随着所述变形机构引起的所述分隔膜的弹性变形而向中心轴方向弹性变形,从而包入所述工件。
6、根据本发明的工业机器人具备上述抓取装置。
7、发明效果
8、根据本发明,通过分隔膜的弹性变形,抓取部向中心轴方向弹性变形(收缩),抓取部在工件的外周面的整个圆周方向上均匀地抵接而包入工件。此时,在工件的外周面与抓取部的接触点处,从抓取部对工件作用按压力。其结果,在工件的外周面与抓取部之间作用与按压力成比例的摩擦力。
9、另外,通过抓取部与工件的外周面在整个圆周方向上均匀地抵接而包入工件,从而在工件、抓取部和分隔膜之间形成密闭空间。密闭空间的容积因分隔膜的弹性变形而增大,因此在密闭空间中产生负压。通过在该密闭空间产生的负压,工件被吸引。
10、因此,能够提供一种通过作用于工件的外周面与抓取部之间的摩擦力、以及通过在形成于工件、抓取部和分隔膜之间的密闭空间中产生的负压的吸引力,能够可靠地抓取形状难以抓握的工件或表面易滑的工件的抓取装置及工业机器人。
技术特征:
1.一种抓取装置,抓握而抓取工件,包括:
2.根据权利要求1所述的抓取装置,其中,还包括:
3.根据权利要求2所述的抓取装置,其中,
4.根据权利要求3所述的抓取装置,其中,
5.根据权利要求3所述的抓取装置,其中,
6.根据权利要求2~5中任一项所述的抓取装置,其中,
7.根据权利要求1~6中任一项所述的抓取装置,其中,
8.根据权利要求1~7中任一项所述的抓取装置,其中,
9.根据权利要求1~8中任一项所述的抓取装置,其中,
10.一种工业机器人,其中,
技术总结
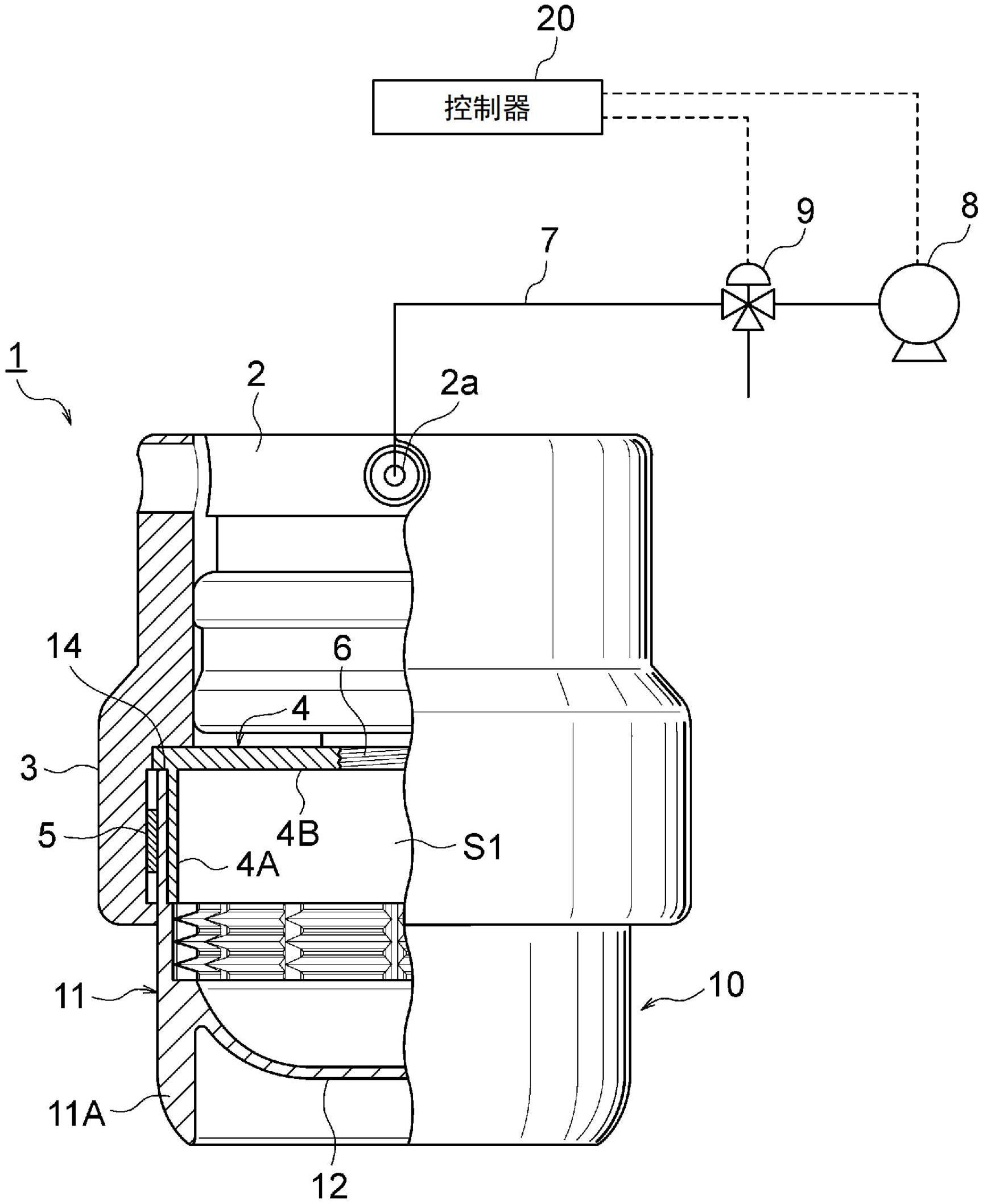
本发明提供一种能够可靠地抓握而抓取形状难以抓握的工件或表面易滑的工件的抓取装置及工业机器人。抓取装置(1)具备:可弹性变形的分隔膜(12);使分隔膜(12)弹性变形的真空泵(8)(变形机构);以及筒状的抓取部(11A),其从分隔膜(12)的周缘延伸并随着分隔膜(12)的弹性变形而向中心轴方向弹性变形从而包入工件。通过抓取部(11A)与工件接触,在工件、抓取部(11A)和分隔膜(12)之间形成密闭空间。由于该密闭空间的容积因分隔膜(12)的弹性变形而增大,因此在该密闭空间中产生负压。抓取装置(1)通过作用于工件与抓取部(11A)之间的摩擦力、和通过在形成于工件、抓取部(11A)和分隔膜(12)之间的密闭空间中产生的负压的吸引力,可靠地抓握而抓取工件。
技术研发人员:波多野至,松本笃史,岩田俊介
受保护的技术使用者:霓达株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!