用于控制遥操作机器人的方法和系统与流程
本发明涉及一种通过具有可移动调节器的输入装置来控制遥操作机器人的方法和系统,以及一种用于执行该方法的计算机程序或计算机程序产品。
背景技术:
1、根据企业内部实践,已知的是通过具有可移动调节器的输入装置来控制遥操作机器人。在此是基于所检测到的操作员对调节器的手动调整来指挥遥操作机器人的目标姿势变化,例如其末端执行器或tcp的目标姿势变化;反过来,基于通过传感技术确定的遥操作机器人上的外力来指挥调节器的目标力,使得操作员在调节器上获得触觉(力)反馈。
技术实现思路
1、本发明的目的是通过对输入装置的调节器的操控来改善遥操作机器人的控制。
2、本发明的目的通过一种具有权利要求1所述特征的方法来实现。权利要求8、9请求保护一种用于执行在此所述方法的系统或计算机程序或计算机程序产品。优选地扩展方案由从属权利要求给出。
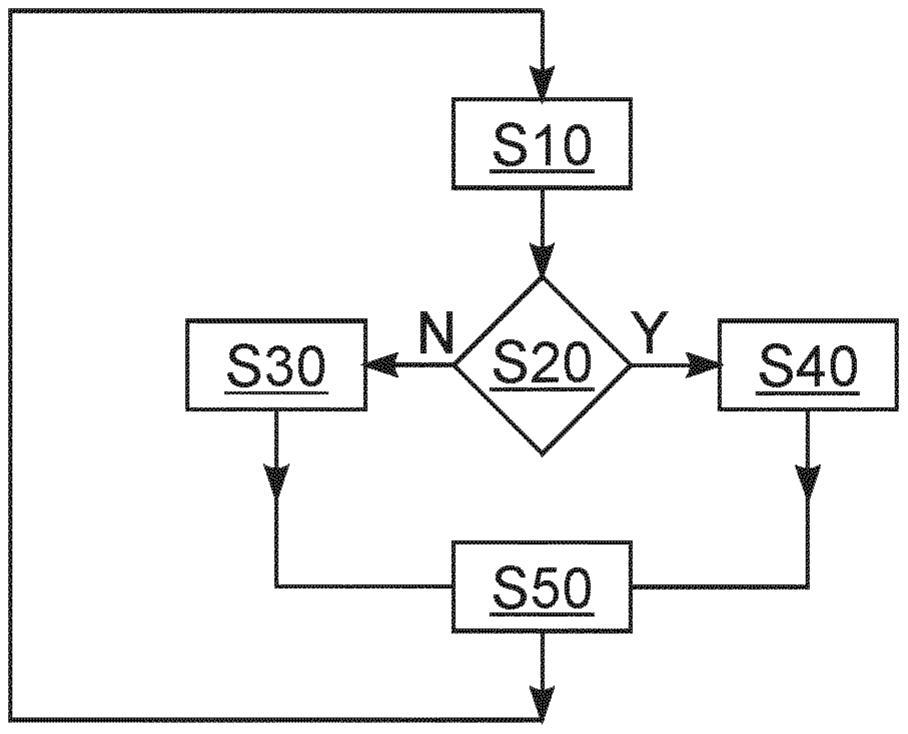
3、根据本发明的一种实施方式,一种利用具有可移动调节器的输入装置控制遥操作机器人的方法,包括以下步骤,这些步骤优选被多次地、在一种实施方式中被循环地重复:
4、-基于所检测到的调节器的姿态(stellung),在一种实施方式中是由操作员手动实现的姿态,指挥遥操作机器人的目标姿势(soll-pose),在一种实施方式中是指挥遥操作机器人的特定于机器人的参照物的目标姿势;和
5、-指挥调节器的目标力,特别是在调节器上。
6、在一种实施方式中,通过指挥目标姿势,可以有利地(更)精确控制遥操作机器人;在一种实施方式中,通过指挥目标力,可以(更)有利地、特别是(更)可靠地、(更)符合人体工程学地和/或(更)直观地实现调节器的操纵(bedienung),并且因此在一种实施方式中简化了远程操作和/或提高了其可靠性。
7、在一种实施方式中,遥操作机器人具有((远程)机器人)臂,该臂具有至少三个、特别是至少六个、在一种实施方式中为至少七个关节或运动轴。在一种实施方式中,特定于机器人的参照物相对于遥操作机器人(臂)的远侧末端法兰是固定的;在一种实施方式中,特定于机器人的参照物具有遥操作机器人(臂)的末端执行器或tcp,特别可以是遥操作机器人(臂)的末端执行器或tcp。
8、在一种实施方式中,调节器与遥操作机器人和/或遥操作机器人的(机器人)控制器在空间上间隔开。在一种实施方式中,输入装置、特别是输入装置控制器与遥操作机器人和/或遥操作机器人的(机器人)控制器信号连接,在一种扩展方案中为有线连接,由此在一种实施方式中可以提高安全性,在另一种扩展方案中为无线连接,由此在一种实施方式中可以提高灵活性和/或工作半径。在一种实施方式中,特别是通过一个或多个关节,调节器可移动地安装在输入装置的基座上,其中,在一种实施方式中,优选传感技术地,检测调节器相对于输入装置的基座的姿态。
9、在一种实施方式中,遥操作机器人的姿势包括一维、二维或三维位置(position)和/或一维、二维或三维方向(orientierung),在一种实施方式中是遥操作机器人的特定于机器人的参照物、特别是末端执行器或tcp的一维、二维或三维位置和/或一维、二维或三维方向。附加地或替代地,在一种实施方式中,遥操作机器人的姿势包括遥操作机器人的一个或多个关节的关节姿态。在一种实施方式中,调节器的姿态包括调节器相对于输入装置的基座的一维、二维或三维位置和/或一维、二维或三维方向、和/或一个或多个关节的关节姿态,调节器通过它们相对于输入装置的一个或基座可移动地安装。
10、本发明意义下的力还可以包括、特别可以是反平行的力偶或转矩。本发明意义下的控制也可以是调节。
11、在一种实施方式中,遥操作机器人的驱动器调整其轴或关节,以便驶入(一个或多个)所指挥的目标姿势,其中,在一种实施方式中借助于逆运动学(inverser kinematik)通过固有已知的方式来确定相应的目标关节调整,必要时是以固有已知的方式在冗余分辨率下来确定。
12、在一种实施方式中,输入装置的驱动器致动调节器,以便施加所指挥的目标力,特别是通过调节器施加到手动操作调节器的操作员身上。
13、根据本发明的一种实施方式,针对遥操作机器人,在(各自)的允许区域和不允许区域之间设定、特别是要设定一个或多个虚拟边界。
14、在一种实施方式中,一个或多个虚拟边界(分别)被、特别是要被设定为遥操作机器人的工作空间中的虚拟的壁,特别是直的或弯曲的壁。
15、由此,在一种实施方式中,可以改善远程操作,特别是保护遥操作机器人的环境,和/或操作员借助于输入装置来改善、特别是引导对遥操作机器人的控制。
16、在一种实施方式中,一个或多个虚拟边界(分别)被、特别是要被设定为遥操作机器人的一个或多个关节的虚拟止挡。
17、由此,在一种实施方式中,可以保护遥操作机器人。
18、根据本发明的一种实施方式,被指挥的调节器的目标力从虚拟边界起具有复位力分量,该复位力分量反作用于为了指挥遥操作机器人离开边界朝不允许区域方向的运动而对调节器的操作,或者为此被确定或指挥。
19、由此,在一种实施方式中,通过调节器或者说调整调节器来控制遥操作机器人的操作员将获得人为或附加产生的反作用力形式的有利的触觉反馈。由此,在一种实施方式中,可以借助于输入装置或者通过操作调节器的操作员来改善对遥操作机器人的控制,特别是使操作员(更)简单、(更)可靠、(更)精确、(更)符合人体工程学和/或(更)直观地控制遥操作机器人。
20、在一种实施方式中,复位力分量优选仅或唯一地模拟遥操作机器人与障碍物的接触,在一种实施方式中是模拟遥操作机器人的特定于机器人的参照物与环境障碍物的接触。在一种实施方式中,这包括:调节器的操作员将该复位力分量仅感知为如下的力(分量):其对应于在遥操作机器人上、特别是在特定于机器人的参照物上沿垂直于(虚拟)障碍物的(虚拟)表面并从该(虚拟)表面离开指向(允许区域)的方向的外力,在一种实施方式中是对应于按比例缩放的该外力;或者是相应地确定或指挥所述目标力或所述复位力分量。
21、由此,在一种实施方式中,可以借助于输入装置或通过操作调节器的操作员改善遥操作机器人的控制,特别是使操作员(更)简单、(更)可靠、(更)精确、(更)符合人体工程学和/或(更)直观地控制遥操作机器人。
22、在一种实施方式中,该复位力分量是虚拟压力弹簧的力,其中在一种扩展方案中,该虚拟压力弹簧仅通过或者在操作调节器以指挥遥操作机器人离开边界朝向不允许区域的方向运动和/或指挥遥操作机器人的离开边界朝向不允许区域的方向的运动时而被(虚拟地)张紧或压缩;和/或该虚拟压力弹簧的弹簧(压)力是取决于调节器的当前和/或先前姿态和/或取决于遥操作机器人、特别是特定于机器人的参照物的当前和/或先前姿势,尤其是基于调节器的当前和/或先前姿态和/或遥操作机器人、特别是特定于机器人的参照物的当前和/或先前姿势来确定。因此,在一种实施方式中,虚拟弹簧仅是用作压力弹簧而不是用作拉力弹簧。在一种实施方式中,该复位力分量或虚拟压力弹簧仅是获得或模拟了遥操作机器人上的反向于接触或侵入方向的力(该接触或侵入方向指向离开边界朝向不允许区域的方向),而不是任何其它方向的力,或者是获得或模拟调节器上的相应的力(分量)。
23、由此,在一种实施方式中,可以特别简单、可靠和/或精确地确定复位力分量,和/或特别简单和/或逼真地模拟遥操作机器人与障碍物的接触。
24、在一种实施方式中,虚拟压力弹簧的弹簧(压)力(还)取决于预先给定的、在一种实施方式中是通过输入装置的操作员可设定的虚拟压力弹簧的弹簧刚度,特别是基于预先给定的、在一种实施方式中是通过输入装置的操作员可设定的虚拟弹簧的弹簧刚度来确定。
25、附加地或替代地,在一种实施方式中,虚拟压力弹簧的弹簧(压)力(还)取决于预先给定的、在一种实施方式中是通过输入装置的操作员可设定的、在调节器的调整与遥操作机器人、特别是特定于机器人的参照物的运动之间的缩放比(skalierung),特别是基于预先给定的、在一种实施方式中是通过输入装置的操作员可设定的、在调节器的调整与遥操作机器人、特别是特定于机器人的参照物的运动之间的缩放比来确定。
26、由此,在一种实施方式中,可以使虚拟弹簧或接触力分量或模拟接触实现特别有利的弹簧特性,并且在一种实施方式中能够由此简化远程操作和/或提高其可靠性。
27、在一种实施方式中,在操作调节器以指挥遥操作机器人的运动期间,禁止指挥遥操作机器人自边界起沿不允许区域的方向运动;或者在操作调节器以指挥遥操作机器人的运动的过程中,减弱(ausgeblendet)或不指挥该运动的自边界起沿不允许区域方向的分量;或者仅指挥该运动沿允许区域方向和/或沿着边界方向的分量。
28、由此,在一种实施方式中,可以改善远程操作,特别是保护遥操作机器人的环境和/或操作员借助于输入装置来改善、特别是引导对遥操作机器人的控制。
29、在一种实施方式中,目标力具有力反馈分量(kraftrückkopplungskomponente),该力反馈分量取决于作用在遥操作机器人处或上的外力,在一种扩展方案中是作用在其特定于机器人的参照物处或上的外力,在一种实施方式中该外力被模拟,在一种扩展方案中该外力被缩放地模拟。
30、在一种实施方式中,遥操作机器人处或上的外力通过遥操作机器人的至少一个远侧的或者说末端执行器侧的力传感器来确定,和/或优选模型辅助地基于遥操作机器人的关节力来确定。
31、由此,在一种实施方式中,可以实现有利的触觉反馈并由此改善了远程操作,有利地使操作员(更)简单、(更)可靠、(更)精确、(更)符合人体工程学和/或(更)直观地控制遥操作机器人。
32、在一种实施方式中,目标力具有阻尼分量,该阻尼分量取决于调节器的调整速度,在一种实施方式中,该调整速度与该调节器相反指向。
33、由此,在一种实施方式中,操作员可以(更)简单、(更)可靠、(更)精确和/或(更)符合人体工程学地控制遥操作机器人。
34、在一种实施方式中,当遥操作机器人处于允许区域中或者不处于边界上或者不处于不允许区域中时,确定调节器的目标力fd,hd,该目标力具有力反馈分量,该力反馈分量取决于在遥操作机器人上的外力fe,在一种实施方式中取决于在特定于机器人的参照物、亦即特别是末端执行器或tcp上的外力,该外力特别是(被缩放地)模拟;在一种实施方式中,该目标力还附加地具有阻尼分量,该阻尼分量取决于调节器的(当前)调节速度(dx/dt)c,hd:
35、fd,hd=fe-d·(dx/dt)c,hd (1)
36、其中d为阻尼系数。
37、在一种实施方式中,当遥操作机器人处于允许区域中或者不处于边界上或者不处于不允许区域中时,遥操作机器人的、在一种实施方式中是特定于机器人的参照物的、亦即特别是末端执行器或tcp的目标姿势xd,r,根据以下公式来确定:
38、xd,r=(xc,hd-xini,hd)·s+xini,r (2)
39、其中,xc,hd为调节器的当前姿态,xini,hd为调节器的先前姿态,xini,r为遥操作机器人或特定于机器人的参照物的先前姿势,s为预先给定的在调节器的调整与遥操作机器人或特定于机器人的参照物的运动之间的缩放比。
40、在一种实施方式中,对于一个或多个虚拟边界,分别确定不允许的或边界方向ul,优选垂直于虚拟边界和沿着不允许区域的方向。例如,如果在笛卡尔工作空间中,在ymax下预先给定虚拟壁形式的虚拟边界,则该虚拟边界是不允许的或边界方向ul=[0 1 0]t。
41、在一种实施方式中,确定一旋转矩阵0rl,该旋转矩阵使笛卡尔空间的坐标系0与在不允许或指向边界方向、在一种实施方式中具有与该不允许的或边界方向看齐的z轴的坐标系l相互变换,其中在一种实施方式中,该变换或旋转矩阵的旋转轴u和旋转角θ根据下式来确定:
42、u=[0 0 1]t×ul (3.1)
43、cosθ=([0 0 1]t·ul)/||ul|| (3.2)
44、并且旋转矩阵0rl是从坐标系l变换到坐标系0,其转置(0rl)t相应地从坐标系0变换到坐标系l。当然,也可以使用另一个轴来代替z轴,并且在相应的方程中考虑。
45、在根据等式(1)的调节器目标力fd,hd的一种实施方式中,从虚拟边界起,为虚拟压缩弹簧添加(hinzugefügt)复位力分量:
46、lehd=(0rl)t·(xd,hd-xc,hd) (4.1)
47、lfimp,hd=0 (4.2)
48、
49、fimp,hd=0rl·lfimp,hd (4.4)
50、fd,hd=fe+fimp,hd-d·(dx/dt)c,hd (5)
51、在此,k是虚拟弹簧的弹簧刚度,xd,hd是调节器的目标姿态,特别是根据下式:
52、xd,hd=(xc,r-xini,r)/s+xini,hd (6)
53、其中xc,r是特定于机器人的参照物的当前姿势。可以看出,虚拟压力弹簧的弹簧力取决于调节器的当前和先前姿态以及遥操作机器人的当前和先前姿势:
54、k·(xd,hd-xc,hd)=k·[(xc,r-xini,r)/s+(xini,hd-xc,hd)] (7)
55、并且仅反作用于为了指挥遥操作机器人离开边界朝不允许区域方向的运动而对调节器的操作(lehd[3]<0)。索引*[3]表示相应向量的z分量。
56、例如,如果在工作空间中在ymax的情况下预先给定虚拟壁形式的虚拟边界,则从该边界起,即,yd,r>ymax,其中yd,r为末端执行器或tcp的笛卡尔位置的y分量,则在操作调节器以指挥遥操作机器人运动期间禁止指挥遥操作机器人沿不允许区域的方向运动:
57、
58、并且为根据等式(1)调节器的目标力fd,hd添加复位力分量
59、fimp,hd=k·[0(yd,hd-yc,hd)0]t (9.1)
60、或者是以通用形式
61、fimp,hd=k·(xd,hd-xc,hd)(9.2)
62、添加。
63、在一种实施方式中,如果虚拟边界被设定为一个或多个关节的虚拟止挡,则在单矩阵(eins-matrix)中,处于止挡或虚拟边界上的关节的行或列记为0,例如,遥操作机器人具有七个关节,并且第二和第六关节在虚拟止挡上:
64、
65、并且利用特定于机器人的参照物的雅可比矩阵j,执行对矩阵j·p·(j·p)t的奇异值分解(“奇异值分解法(singular value decomposition)”,svd),为酉矩阵u、酉矩阵v的共轭矩阵v*和奇异值的矩阵s(u·s·v*=j·p·(j·p)t)。对于奇异值等于零,即矩阵s的值s[m,m]等于零,通过矩阵u的相关列向量u[:,m]确定不允许的或边界方向。索引*[m,m]表示相应矩阵的m列和m行中的值,索引*[:,m]表示第m列向量。
66、附加地,根据下式确定速度方向
67、dxe/dt=j·(1-p)·j#·(dx/dt)d,r(11.1)
68、uvel=dxe/dt/||dxe/dt||(11.2)
69、其中j#是伪逆;在不存在关节止挡的假设下,确定用于达到目标姿势的笛卡尔目标速度,并确定该速度方向与矩阵u的一个或多个相应列向量u[:,m]之间的(相应)角度θ:
70、cosθ=(uvel·u[:,m])/||u[:,m]|| (12)
71、如果该角度大于90°,则使用矩阵u的负(归一化)列向量u[:,m]作为不允许的或边界方向ul:否则,使用矩阵u的(归一化)列向量u[:,m]不允许的或边界方向ul:
72、
73、随后,以上述的方式使用该不允许的或边界方向ul,以便在虚拟边界是遥操作机器人的一个或多个关节的虚拟止挡形式的情况下,确定或指挥相关的复位力分量。
74、根据本发明的一种实施方式,一种系统特别是被硬件技术和/或软件技术、特别是编程技术地设计用于执行在此所述的方法,和/或包括:
75、-用于为遥操作机器人在允许区域与不允许区域之间预先设定至少一个虚拟边界的装置;
76、-用于基于检测到的调节器的姿态来指挥遥操作机器人的目标姿势的装置;和
77、-用于指挥调节器的目标力的装置,其中,目标力从虚拟边界起具有复位力分量,该复位力分量反作用于为了指挥遥操作机器人离开边界朝不允许区域方向的运动而对调节器的操作。
78、在一种实施方式中,该系统或其装置包括:
79、-用于在操作调节器以指挥遥操作机器人的运动时禁止指挥遥操作机器人从边界起沿不允许区域的方向运动的装置。
80、本发明意义下的系统和/或装置可以硬件技术和/或软件技术地构成,特别是具有:至少一个、优选与存储系统和/或总线系统数据连接或信号连接的处理单元,特别是数字处理单元,特别是微处理单元(cpu)、图形卡(gpu)等;和/或一个或多个程序或程序模块。处理单元可以为此被构造为:执行被实施为存储在存储系统中的程序的指令;从数据总线采集输入信号;和/或将输出信号发送至数据总线。存储系统可以具有一个或多个特别是不同的存储介质,特别是光学的、磁的、固体的和/或其它非易失性的介质。程序可以被提供为,其能够体现或执行在此所述的方法,使得处理单元能够执行这种方法的步骤,并由此特别是能够控制遥操作机器人。在一种实施方式中,计算机程序产品可以具有、特别是计算机可读的和/或非易失性的、用于存储程序或指令的或其上存储有程序或在其上存储有指令的存储介质。在一种实施方式中,通过系统或控制器、特别是计算机或包括多个计算机的单元执行该程序或该指令,使得该系统或该控制器、特别是该一个或多个计算机执行在此所述的方法或该方法的一个或多个步骤,或者该程序或该指令被设计用于此目的。
81、在一种实施方式中,该方法的一个或多个、特别是所有的步骤被完全或部分自动化地执行,特别是通过所述系统或其装置。
82、在一种实施方式中,该系统包括遥操作机器人和/或其机器人控制器和/或输入装置。
83、本发明意义下的接触特别是以已知的方式理解为两个表面的单侧接触或触碰。
84、在一种实施方式中,借助于在遥操作机器人的关节空间或关节坐标的空间中的位置调节、速度调节或力调节,实现目标姿势,在一种扩展方案中是指挥和/或驶入目标姿势。由此,在一种实施方式中,遥操作机器人可以有利地、特别是(更)精确、(更)简单和/或(更)可靠地运行。
- 还没有人留言评论。精彩留言会获得点赞!