机器人系统、机器人的加工方法以及加工程序与流程
本发明涉及机器人系统、机器人的加工方法以及加工程序。
背景技术:
1、至今为止,用机器人加工工件的系统被众所周知。例如,在专利文献1中公开了一种机器人系统,该机器人系统使保持工件的机器人按照较粗的示教点移动且那时将工件相对于工具向所期望的按压方向按压。也就是说,在该机器人系统中,在工具被以规定的力按压在工件的状态下,工件沿着大致较粗的示教点移动。
2、专利文献1:日本特开平06-289923号公报
技术实现思路
1、不过,在专利文献1的机器人系统中,执行以规定的力将工具按压在工件上的力控制。在这样的力控制中,能够防止过度的力作用在工具以及工件上。另一方面,由于工件通过大致模仿工件的表面那样的轨迹,因此难以将工件加工为与工件的表面无关的形状。
2、鉴于上述内容,本发明的目的在于防止过度的力作用在工具等,同时,将对象物体加工为所期望的形状。
3、本发明的机器人系统包括机器人和控制装置,所述机器人由工具对对象物体的加工部分进行去除加工,所述控制装置控制所述机器人。所述控制装置具有轨迹生成部和动作命令部,所述轨迹生成部生成通过所述加工部分的所述工具的目标轨迹,所述动作命令部执行位置控制,同时,执行弹性控制,在所述位置控制中,以所述工具沿着所述目标轨迹移动的方式,来使所述机器人动作,在所述弹性控制中,以所述工具响应于来自所述对象物体的反作用力而脱离所述目标轨迹移动且向所述对象物体的所述工具的按压力响应于自所述目标轨迹的距离而变大的方式,来使所述机器人动作。
4、本发明的机器人的加工方法包括生成通过对象物体的加工部分的、机器人的工具的目标轨迹的步骤、执行位置控制的步骤和与所述位置控制并行地执行弹性控制的步骤,在所述位置控制中,以所述工具沿着所述目标轨迹移动的方式使所述机器人动作,在所述弹性控制中,以所述工具响应于来自所述对象物体的反作用力而脱离所述目标轨迹移动且向所述对象物体的所述工具的按压力响应于自所述目标轨迹的距离而变大的方式,来使所述机器人动作。
5、本发明的加工程序为了使机器人去除加工对象物体的加工部分而使计算机执行生成通过对象物体的加工部分的、机器人的工具的目标轨迹的步骤、执行位置控制的步骤和与所述位置控制并行地执行弹性控制的步骤,在所述位置控制中,以所述工具沿着所述目标轨迹移动的方式使所述机器人动作,在所述弹性控制中,以所述工具响应于来自所述对象物体的反作用力而脱离所述目标轨迹移动且向所述对象物体的所述工具的按压力响应于自所述目标轨迹的距离而变大的方式,来使所述机器人动作。
6、(发明效果)
7、根据所述机器人系统,能够防止过度的力作用在工具等,同时,将对象物体加工为所期望的形状。
8、根据所述机器人的加工方法,能够防止过度的力作用在工具等,同时,将对象物体加工为所期望的形状。
9、根据所述加工程序,能够防止过度的力作用在工具等,同时,将对象物体加工为所期望的形状。
技术特征:
1.一种机器人系统,其特征在于:
2.根据权利要求1所述的机器人系统,其特征在于:
3.根据权利要求2所述的机器人系统,其特征在于:
4.根据权利要求3所述的机器人系统,其特征在于:
5.根据权利要求4所述的机器人系统,其特征在于:
6.根据权利要求5所述的机器人系统,其特征在于:
7.一种机器人的加工方法,其特征在于:
8.根据权利要求7所述的机器人的加工方法,其特征在于:
9.一种加工程序,其特征在于:
10.根据权利要求9所述的加工程序,其特征在于:
技术总结
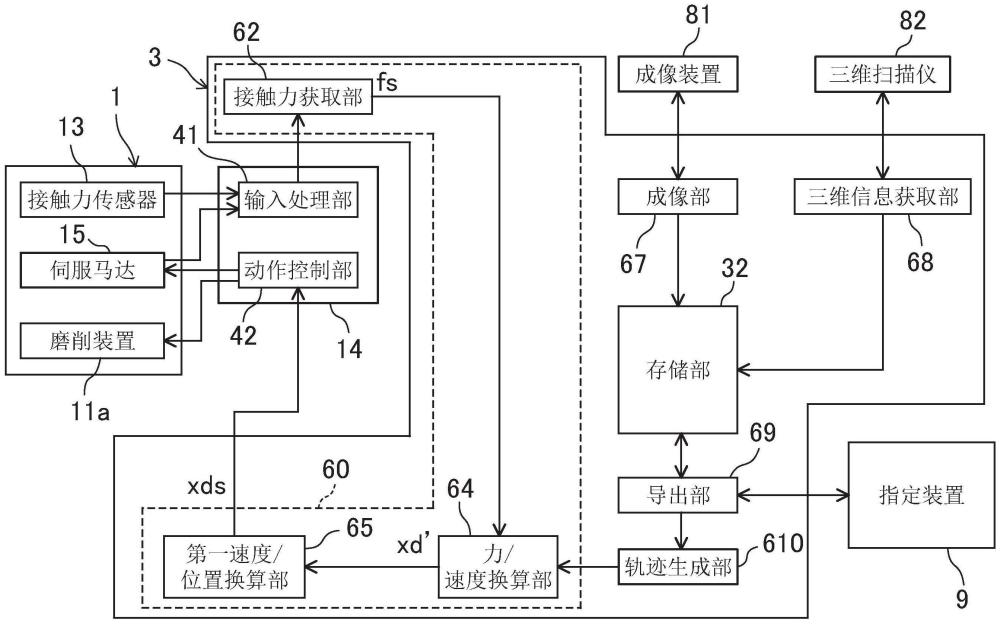
本发明提供一种机器人系统。机器人系统(100)包括机器人(1)和控制装置(3),所述机器人(1)由磨削装置(11a)对对象物体W的加工部分B进行去除加工,所述控制装置(3)控制机器人(1)。控制装置(3)具有轨迹生成部(610)和动作命令部(60),所述轨迹生成部(610)生成通过加工部分(B)的磨削装置(11a)的目标轨迹,所述动作命令部(60)执行位置控制,同时,执行弹性控制,在所述位置控制中,以磨削装置(11a)沿着目标轨迹移动的方式,来使机器人(1)动作,在所述弹性控制中,以磨削装置(11a)响应于来自对象物体(W)的反作用力而脱离目标轨迹移动且向对象物体(W)的磨削装置(11a)的按压力响应于自目标轨迹的距离而变大的方式,来使机器人(1)动作。
技术研发人员:东健太郎,赤松政彦,上月崇功,木下博贵,莲沼仁志,仓岛一辉,西尾祥一,田中宏树,高桥大树
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!