改进的用于装载目标装载辅助器的方法和用于此的仓储和分拣系统与流程
本发明涉及一种用于在装载站以自动的装载装置为目标装载辅助器装载货物的方法。本发明还涉及一种用于实施所述方法的仓储和分拣系统。仓储和分拣系统包括仓储区域、带有自动的装载装置的装载站、源输送技术设备和订单计算机。
背景技术:
1、这样的方法和这样的仓储和分拣系统基本上是由现有技术已知的。普遍的问题是,当运输目标装载辅助器时,目标装载辅助器的装载类型显著影响包含在所述目标装载辅助器中的货物的损伤风险。例如,重的货物一般放置在目标装载辅助器中的更下方,而轻的货物往往放置在更上方。如果客户订购了重的罐子和易碎的酒杯,如果按以上给出的方式将玻璃杯在上部放置在目标装载辅助器中,则能够降低玻璃杯破裂的风险。
2、由于在仓储和分拣系统中处理的大量不同的货物类型,简单的装载规则并不一定会带来有利的包装型式。在某些情况下,在特定的货物类型的情况下反转装载顺序可能是符合目的的,例如在客户订购了一个垫子和多个玻璃瓶果酱的情况下。传统的处理程序使得较重的果酱在目标装载辅助器中放置在下方,而垫子放置在上方。在此,如果目标装载辅助器被猛烈地放置在存放区域上,垫子可以吸收冲击并显著降低玻璃杯破裂的风险。
3、此外,对现代仓储和分拣系统的性能要求不可避免地导致在操作货物时的速度和加速度不断增加。在这里,简单的移动规则也并不总是能带来最佳目标。例如,在加速度过大的情况下酒杯破裂的风险明显大于果酱玻璃瓶破裂的风险。
4、从现有技术出发,最终在装载目标装载辅助器时需要不同的处理程序。
技术实现思路
1、因此,本发明的目的是提供一种改进的用于装载目标装载辅助器的方法以及一种用于实施所述方法的改进的仓储和分拣系统。特别是,应当给出用于装载目标装载辅助器的不同处理程序。
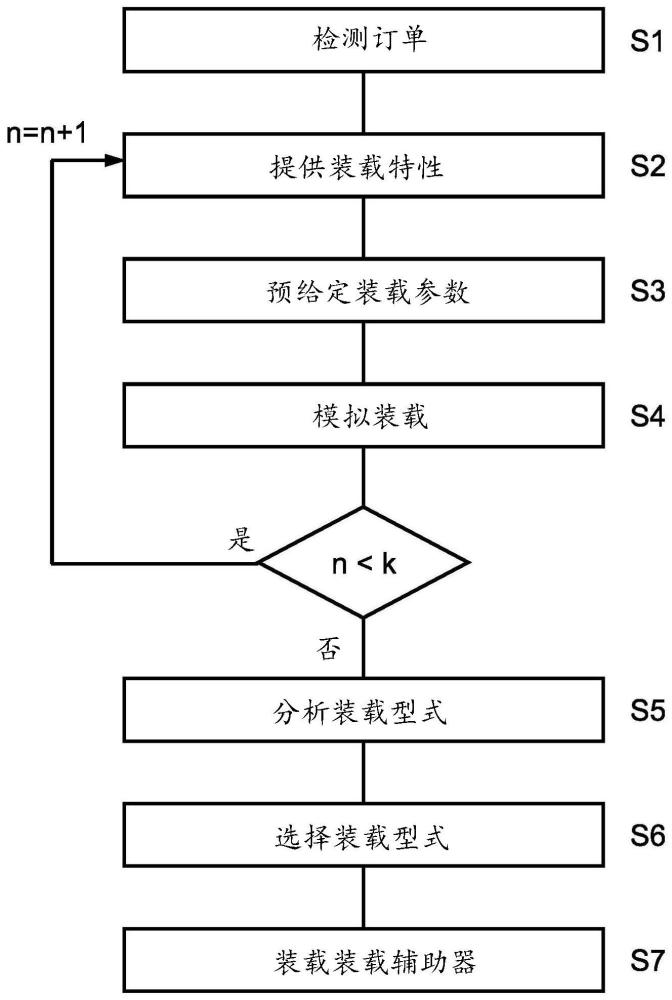
2、本发明的目的通过一种用于在装载站以自动的装载装置为目标装载辅助器装载货物的方法来实现,所述方法包括以下步骤:
3、a)由订单计算机检测订单并确定分配给订单的货物;
4、b)在数据库中为仿真单元提供装载特性,所述装载特性包括装载装置的特性和货物的货物特性并且特别是被电子地检测;
5、c)在仿真单元中预给定装载参数,所述装载参数包括至少一个与装载装置有关的参数和/或至少一个与货物有关的参数和/或至少一个与目标装载辅助器有关的参数;
6、d)基于装载特性和装载参数,借助于仿真单元仿真以货物对目标装载辅助器的装载过程,并通过仿真单元创建装载型式;
7、e)以改变的装载参数重复步骤b)至d);
8、f)借助于仿真单元基于目标规定分析所创建的装载型式;
9、g)借助于仿真单元选择最好地满足目标规定的装载型式并创建用于装载装置的装载规则,所述装载规则包括引起所选择的装载型式的装载参数;
10、h1)如果所述装载型式中的至少一个装载型式满足所述目标规定,则(以源装载辅助器或无需源装载辅助器)将货物(特别是通过自动的源输送技术设备)运抵至装载站的自动的装载装置,并且通过所述自动的装载装置根据装载规则来为目标装载辅助器装载货物。特别地,可以在有或没有源装载辅助器的情况下在自动的源输送技术设备上实现将货物运抵至装载站的自动的装载装置。
11、特别是,以货物对目标装载辅助器的装载可以包括:从装载装置移交货物和将货物接收在目标装载辅助器上或目标装载辅助器中,所述目标装载辅助器例如是容器、纸箱等。对目标装载辅助器的装载可以包括装载一件或多件货物。
12、特别是,货物可以从其移交(在装载装置处)直至其接收(在目标装载辅助器上)仅通过重力运动、例如通过下落、滑动和/或投掷而运动。仅在合乎目的的情况下,货物可以在其运动时被施加力分量(并且被“抛出”),例如以便增加移动速度或改变货物的定向。
13、特别是,要区分货物的“移交”和货物的“取出”。当“移交”货物时,不规定货物克服重力的运动,因此不规定货物的提升,而在“取出”时则规定货物克服重力的运动,因此规定货物的提升。这特别是适用于通过下落或滑动而移交货物。如果货物被投掷,则货物可能被施加克服其重力的力,以便使投掷抛物线变平或实现在第一区段中向上指向的投掷抛物线。
14、此外,本发明的目的通过一种仓储和分拣系统来实现,所述仓储和分拣系统特别是用于实施根据权利要求1至15中任一项所述的方法,所述仓储和分拣系统包括
15、-用于提供货物的仓储区域;
16、-具有自动的装载装置的装载站,以用于根据装载规则为目标装载辅助器装载货物(如果至少一个装载型式满足目标规定的话);
17、-用于运输货物的源输送技术设备,所述源输送技术设备连接仓储区域和装载站;
18、-订单计算机,所述订单计算机用于检测订单并确定分配给订单的货物;
19、-至少一个数据库,在所述至少一个数据库中能提供装载特性,所述装载特性包括装载装置的特性和货物的货物特性;以及
20、-仿真单元,所述仿真单元与所述至少一个数据库在数据技术方面连接并且构造为用于:
21、-处理(特别是电子检测的)装载特性,所述装载特性包括装载装置的特性和货物的货物特性;
22、-处理对装载参数的预给定,所述装载参数包括至少一个与装载装置有关的参数和/或至少一个与货物有关的参数和/或至少一个与目标装载辅助器有关的参数;
23、-基于装载特性和装载参数仿真以货物对目标装载辅助器的装载过程;
24、-创建装载型式;
25、-以改变的装载参数重复上述步骤;
26、-基于目标规定分析所创建的装载型式;
27、-选择最好地满足目标规定的装载型式并创建用于装载装置的装载规则,所述装载规则包括引起所选择的装载型式的装载参数。
28、借助所提出的方法和所提出的仓储和分拣系统,可以实现对目标装载辅助器的优化的装载。为此,制定目标规定并在实际装载目标装载辅助器之前仿真装载过程,其中,至少改变装载参数。如果找到合适的装载型式,即,满足、特别是最佳地满足目标规定的装载型式,则实际上以所找到的装载参数来实施对目标装载辅助器的装载。
29、例如,为了装载目标装载辅助器,可以通过下落、滑动和/或投掷来将至少一个货物移交到目标装载辅助器中。这使得在装载目标装载辅助器时能够实现特别高的速度。然而与此相伴地,装载过程的结果存在一定的不确定性,因为装载过程由于下落、滑动和/或投掷而不是严格确定性的。所提出的措施的应用在这里是特别有利的,因为能够通过预先仿真来降低所提到的不确定性。因此,能更好地预测和估计装载过程的结果。
30、“装载型式”特别是说明:在装载过程之后货物如何处于目标装载辅助器中,并且特别是也说明:是所有规定的货物都处于目标装载辅助器中还是一些货件从目标装载辅助器突出或甚至从其中掉出。换句话说,装载型式对应于目标装载辅助器中的包装秩序(packordnung)。
31、优选地,目标规定选自如下组,所述组包括目标装载辅助器的填充程度、目标装载辅助器中的货物的状态和/或目标装载辅助器中的货物的姿态。填充程度可以例如以被位于目标装载辅助器中的货物所占据的目标装载辅助器的体积百分比给出。特别是,在目标装载辅助器中的货物的状态包括货物的允许的(弹性和/或塑性的)形状变化,所述货物在达到静止状态之后(特别是在仿真的下落或投掷之后)在目标装载辅助器中允许至多具有所述形状变化。货物的姿态是货物在目标装载辅助器中的位置和定向。例如可以规定,货物以对顾客有吸引力的方式布置在目标装载辅助器中。以如前所述的方式从目标装载辅助器中掉出的货物则例如也不具有在目标装载辅助器中的位置并且因此也不满足与货物的姿态有关的目标规定。目标规定还可以涉及在目标装载辅助器的装载过程期间和/或进一步的运输路线上针对货物的损伤的最大可容忍风险。例如,可以以轻微改变的装载特性多次仿真装载过程,并且在此确定出现货物的损伤的仿真运行的份额。
32、因此,还有利的是,如果为了创建装载型式:
33、-通过仿真单元计算货物的状态,在为目标装载辅助器仿真地装载货物之后货物在达到静止状态之后具有所述状态;
34、-通过仿真单元计算目标装载辅助器的填充程度;和/或
35、-通过仿真单元计算货物在目标装载辅助器中的姿态,在为目标装载辅助器仿真地装载货物之后货物在达到静止状态之后具有所述姿态。
36、因此也有利的是,以改变的装载特性重复步骤e)。由此能够考虑到装载特性可能是不能精确确定的。此外,在步骤e)中使用备选的装载装置或以备选的货物进行装载可能导致不同的装载装置特性和货物的货物特性。
37、一般来说,“装载特性”是不改变的或短期不能改变的影响装载过程的固定参量。其包括装载装置的特性,并且可以例如与装载装置的几何形状、滑道的摩擦系数等有关。货物特性可以例如与货物的几何形状、货物的重量、货物的摩擦系数等有关。
38、“装载参数”是可以(即使短期地)改变的影响装载过程的参量。“与装载装置有关的参数”在此例如可以是装载速度、倾倒角度、倾倒高度、装载位置等。“与货物有关的参数”可以例如是装载顺序、装载前货物的取向等。“与目标装载辅助器有关的参数”可以例如是目标装载辅助器的形状、尺寸或质地。源装载辅助器的倾倒角度例如可以是在将设置为源装载辅助器的悬挂袋倾倒时的角度。倾倒角度可特别是作为在源装载辅助器的底部与水平面之间的角度给出。
39、据此有利的是:
40、-所述至少一个与装载装置有关的参数选自包括以下项的组:装载装置的结构型式、装载速度、源装载辅助器的倾倒角度、货物到目标装载辅助器中的下落高度和/或目标装载辅助器的装载位置;和/或
41、-所述至少一个与货物有关的参数选自包括以下项的组:对订单的货物的选择、在将货物馈送至目标装载辅助器期间的装载顺序和/或货物的姿态;和/或
42、-所述至少一个与目标装载辅助器有关的参数选自包括以下项的组:目标装载辅助器取向、目标装载辅助器位置、目标装载辅助器形状和/或目标装载辅助器尺寸。
43、可以在数据技术上检测和/或以传感器电子地检测装载特性和/或装载参数。装载参数还可以通过用于致动器的调节参量形成。装载特性和/或装载参数可以存储在数据库中,其中,不是所有用于仿真的装载特性和装载参数都必须存储在数据库中。特别有利的是,一方面一些装载参数、例如与装载装置有关的参数存储在数据库中(例如可能的倾倒角度、可能的倾倒高度等),另一方面,一些装载参数、特别是装载顺序在该过程期间生成或检测并且优选地不是已经存储在数据库中。特别是,数据库可以设置用于提供装载参数,所述装载参数包括至少一个与装载装置有关的参数和/或至少一个与货物有关的参数和/或至少一个与目标装载辅助器有关的参数。数据库在数据技术上与仿真单元连接,从而仿真单元可以访问电子检测的装载特性和/或装载参数。
44、与货物有关的货物特性特别是可以来自货物的供应商并且也可以存储在数据库中。另一方面,货物特性也可以首先在仓储和分拣系统中以传感器电子地检测并存储在数据库中。由于数据库在数据技术上与仿真单元连接,因此仿真单元还可以访问电子采集的货物特性。
45、仓储和分拣系统一般包括一个或多个所提到的数据库,所述数据库必要时可以是仿真单元的整体组成部分。
46、在此要注意的是,“装载特性”和“装载参数”的说法在本公开的范畴内不仅可以意指这种装载特性和/或装载参数的类型或名称,而且也意指其值。例如,用于货物的重量的装载特性由其类型或名称“重量”及其值(例如“5kg”)组成。如果在本公开的范畴内提及装载特性或装载参数的变化,则这可以涉及类型的变化和/或值的变化。例如,可以在一个仿真中引入装载特性“宽度”,而在另一个仿真中引入装载特性“重量”。同样,可以在一个仿真中引入针对重量“5kg”的值,而在另一个仿真中引入值“2kg”。当然,类型和/或值的组合改变也是可行的。例如,在一个仿真中可以引入装载特性“宽度”=“200mm”,而在另一个仿真中引入装载特性“重量”=“2kg”。最后还可以设想的是,将装载特性和/或装载参数理解为为类型或名称及其值的组合。例如,一个装载特性可以是“重量5kg”,另一装载特性可以是“重量2kg”。
47、也有利的是,
48、-在步骤b)中,在仿真单元中附加地提供针对装载特性、特别是针对货物特性的公差范围,并且在给定的公差范围内选择用于装载特性的值:
49、-在步骤d)中针对装载特性的所选择的值执行仿真;并且
50、-在步骤e)中在公差范围内改变用于装载特性的值;并且
51、-在步骤f)中的目标规定包括装载过程相对于装载特性的变化的稳健性。
52、如所提到的,装载特性可能不能精确确定。有利地,使得装载特性通过变化而在公差范围内改变、特别是随机地改变。由此可以在确定装载特性时考虑到所提及的不确定性。“装载过程的稳健性”表示装载过程的结果、特别是所建立的装载型式对有偏差的装载特性的依赖程度。
53、还有利的是,
54、-在步骤c)中,在仿真单元中附加地提供针对装载参数的公差范围,并且在给定的公差范围内选择用于装载参数的值,并且
55、-在步骤d)中针对装载参数的所选择的值执行仿真;并且
56、-在步骤e)中在公差范围内改变用于装载参数的值,并且
57、-在步骤f)中的目标规定包括装载过程相对于装载参数的变化的稳健性。
58、装载参数也可能不能精确确定。例如,用于调节倾倒角度的执行机构可能受到公差的影响,由此装载过程在这方面也受到不确定性的影响。有利地,可以使得装载参数通过变化而在公差范围内改变、特别是也随机地改变。由此可以在确定装载参数时考虑到所提及的不确定。在这种情况下,“装载过程的稳健性”表示装载过程的结果对有偏差的装载参数的依赖程度。
59、仿真单元可以包括“仿真模块”和单独的“分析模块”。分析模块还可以具有用于手动分析的输出装置或用于自动分析的分析模块。如果仿真单元包括仿真模块和分析模块,则产生特别是仓储和分拣系统,其包括:
60、-用于提供货物的仓储区域;
61、-具有自动的装载装置的装载站,以用于根据装载规则为目标装载辅助器装载货物(如果至少一个装载型式满足目标规定的话);
62、-用于运输货物的源输送技术设备,所述源输送技术设备连接仓储区域和装载站;
63、-订单计算机,所述订单计算机用于检测订单并确定分配给订单的货物;
64、-至少一个数据库,在所述至少一个数据库中能提供装载特性,所述装载特性包括装载装置的特性和货物的货物特性;以及
65、-仿真单元,所述仿真单元与所述至少一个数据库在数据技术方面连接并且所述仿真单元具有仿真模块和分析模块,所述仿真模块构造为用于:
66、-通过所述仿真模块处理(特别是电子检测的)装载特性,所述装载特性包括装载装置的特性和货物的货物特性;
67、-通过所述仿真模块处理对装载参数的预给定,所述装载参数包括至少一个与装载装置有关的参数和/或至少一个与货物有关的参数和/或至少一个与目标装载辅助器有关的参数;
68、-通过所述仿真模块基于装载特性和装载参数仿真以货物对目标装载辅助器的装载过程;
69、-通过所述仿真模块创建装载型式;
70、-以改变的装载参数重复上述步骤;
71、-通过所述分析模块基于目标规定分析所创建的装载型式;
72、-通过所述分析模块选择最好地满足目标规定的装载型式并创建用于装载装置的装载规则,所述装载规则包括引起所选择的装载型式的装载参数。
73、货物可以在有或没有装载辅助器的情况下在仓储区域中提供,并借助于源输送技术设备在有或没有装载辅助器的情况下运抵至装载站的自动的装载装置。例如,仓储区域可以具有多个位置固定地设立的仓储货架和至少一个自动运行的货架操作设备,所述货架操作设备用于将货物装入到仓储货架中和/或从仓储货架取出货物。在此,仓储货架可以构造用于悬挂地和/或放置地提供货物。
74、借助于自动的装载装置可以为目标装载辅助器装载货物。
75、如果以装载辅助器将货物运抵,则这些装载辅助器对应于“源装载辅助器”。因此,对目标装载辅助器的装载可以也包括卸载源装载辅助器。对目标装载辅助器的装载可以通过将货物从源装载辅助器重新装载到目标装载辅助器中来完成。源装载辅助器可以是例如容器、托盘、纸箱亦或是悬挂袋。可以以源装载辅助器在仓储货架中提供货物。
76、特别是,悬挂袋可以根据专利申请wo2019/195871a1或wo2020/150762a1来构造并且以其中描述的方式用于在这里公开的方法和在这里公开的仓储和分拣系统。根据该实施方案,通过卸载悬挂袋(源装载辅助器)来装载目标装载辅助器。可以以wo2019/195871a1中描述的卸载站来卸载悬挂袋。
77、具体地,可以根据专利申请wo2012/024714a2来构造具有可闭合的底部开口的容器,并且以其中描述的方式用于在这里公开的方法以及在这里公开的仓储和分拣系统。根据该实施方案,通过卸载容器(源装载辅助器)来装载目标装载辅助器。可以以wo2012/024714a2中描述的转运站来卸载容器。
78、“目标装载辅助器”可以例如是容器、纸箱、发货包装(运输箱、运输袋)等。
79、“自动的源输送技术设备”可以包括固定的输送技术设备和/或移动的输送技术设备。以相同的方式,“自动的目标输送技术设备”可以包括固定的输送技术设备和/或移动的输送技术设备。“自动的源输送技术设备”还可以构造用于放置地或悬挂地运输货物。与此类似,“自动的目标输送技术设备”也可以构造用于放置地或悬挂地运输货物。
80、用于平放地运输货物的固定的输送技术设备可以例如构造为与地面相关的输送技术设备、例如构造为辊式输送技术设备或构造为带式输送技术设备。
81、用于悬挂地运输货物的固定的输送技术设备可以优选地构造为悬挂输送技术设备,其可以包括用于容纳货物的悬挂袋。在这种情况下,货物可以借助于运输载体(例如,具有衣钩的运输载体)在悬挂输送技术设备上运输并且特别是也在悬挂袋中运输。优选地,以一个运输载体或在悬挂袋中运输恰好一件货物。然而也可行的是,以运输载体或悬挂袋同时运输多于一件货物。如果以运输载体或悬挂袋同时运输多件货物,则这些货物主要是相同货物类型的货物。
82、例如,移动的输送技术设备可以是自动的输送车辆,例如“自动引导车,automatedguided vehicle”,简称“agv”,或“自主移动机器人,autonomous mobile robot”,简称“amr”。用于悬挂地运输货物的移动输送技术设备可以例如也包括布置在自动的输送车辆上的悬挂输送技术设备。
83、对目标装载辅助器的装载可以形成分拣过程或者是分拣过程的一部分。就这点而言,装载站也可以理解为“分拣站”并这样称呼。特别地,目标装载辅助器还可以起到发货装载辅助器的作用,其随后被运输离开仓储和分拣系统并被带到接收者处。
84、本发明的其他有利的实施方案和进一步改进方案由从属权利要求以及由结合附图的描述得出。
85、有利的是,所提出的方法附加地包括步骤:
86、h2)将货物运抵至装载站的另外的装载装置并且通过操作机关为目标装载辅助器装载货物;并且
87、-在步骤f)中的评估包括检查所述装载型式中是否有至少一个装载型式满足目标规定,并且-
88、-如果所述装载型式中有至少一个装载型式满足目标规定,则执行步骤g)和h1),或者
89、-如果所述装载型式中没有装载型式满足目标规定,则在省去步骤g)的情况下执行步骤h2)。
90、由此,在仿真装载过程时不能找到合适的装载型式的货物也可以在仓储和分拣系统中被处理。
91、可以在有或没有装载辅助器的情况下在仓储区域中提供货物,并将货物借助于源输送技术设备在有或没有装载辅助器的情况下运抵至装载站的所述另外的装载装置。
92、“操作机关”可以例如是操作人员、人形机器人或具有抓持臂的机器人,其能够例如经由人工智能算法自行选择在目标装载辅助器中的放置位置。也有利的是,所述另外的装载装置是手动的装载装置并且所述操作机关是操作人员。由此能够以特别灵活的方式处理在对装载过程进行模拟时不能找到合适的装载型式的货物。
93、在所述手动的装载装置处,可以由操作人员为目标装载辅助器装载货物。如果货物在源装载辅助器中运输过来,则对目标装载辅助器的装载可以包括将货物从源装载辅助器取出和将货物放置到目标装载辅助器中。换句话说,货物在手动的装载装置处由操作人员从源装载辅助器转装到目标装载辅助器中。
94、手动的装载装置可以包括输入和/或输出装置。输入和/或输出装置优选地具有用于输出装载指示的输出器件、例如显示屏,操作人员借助于所述输出器件获得用于装载目标装载辅助器的装载指示。此外,输入和/或输出装置可以具有用于输入应答指令的输入器件、例如键盘或按钮,操作人员可以经由所述输入器件应答(确认)目标装载辅助器的成功装载。输入器件和输出器件可以例如通过触摸显示器来提供。
95、步骤f)在步骤e)之前执行也是有利的,其中
96、-在步骤f)中的评估包括检查所创建的装载型式是否满足目标规定;并且
97、-如果所确定的装载型式不满足目标规定,则在步骤f)之后执行步骤e);
98、-如果所确定的装载型式满足目标规定,则在步骤f)之后在省去步骤e)的情况下执行步骤g)。
99、在该实施变型方案中,一旦装载型式满足目标规定,就不执行进一步的仿真运行。由此,该实施变型方案特别迅速地产生结果。
100、还有利的是,定义包括任意数量的订单的分析集,其中,针对所述分析集的所有订单执行步骤a)至g),其中,所述方法在步骤f)与g)之间包括以下步骤:
101、i)创建第一订单集,所述第一订单集包括所有如下订单,为所述订单已经创建至少一个满足目标规定的装载型式;
102、ii)创建第二订单集,所述第二订单集包括所有如下订单,为所述订单没有创建满足目标规定的装载型式。
103、以这样的方式可以预先仿真多个订单,随后将订单分为可自动处理的订单(第一订单集)和不可自动处理的订单(第二订单集)并相应地进行进一步处理。第二订单集在此特别是由操作机关、尤其是由操作人员来完成。
104、有益的是,在步骤h1)中通过摄像机检测以货物对目标装载辅助器的装载并且在模拟单元中根据通过摄像机对装载的检测而将用于仿真装载的模型自适应地匹配于实际的装载。特别是有利的是,根据所述检测来匹配装载特性和/或装载参数。由此,关于用于仿真装载过程的模型的错误的假设并且特别是关于装载特性和/或装载参数的错误的假设可以被校正并匹配于现实。随着时间的推移,仿真变得越来越接近实际情况。
105、也有利的是,借助于装载装置、目标装载辅助器和/或货物的虚拟孪生来虚拟化对目标装载辅助器的装载,并且根据通过摄像机对装载的检测来匹配虚拟的装载装置、虚拟的目标装载辅助器和/或虚拟的货物的装载特性和/或装载参数。虚拟孪生特别良好地适合实现仿真亦或观察和评估。在此,人亦或人工智能可以帮助在尽可能少的仿真运行中实现优化的结果、也就是说对目标规定的优化的满足。
- 还没有人留言评论。精彩留言会获得点赞!