基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法与流程
本申请属于轨迹跟踪,尤其涉及一种基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法。
背景技术:
1、机械臂可以在极端情境中协助或替代人们准确有效地执行任务,特别是在半导体设备中,机械臂扮演着重要角色。由于半导体设备在生产过程中步骤繁琐,对精度要求高,使机械臂按照提前设定的关节轨迹进行准确无误的运动是实现这些复杂任务的关键。但是,由于机械臂的物理参数会随负载、外界扰动和运动特性的变化而变化,存在不确定性,因此,通过先进的控制方法准确的估计机械臂的模型参数不确定性和外部干扰,使得机械臂能快速精确的跟踪期望轨迹具有非常重要的现实意义。
2、近些年来,许多针对非线性系统的控制策略被提出,这些方法大多可以以机械臂作为被控对象,包括pid控制、鲁棒控制、模糊控制、反馈线性化、神经网络控制以及滑模控制等,但上述控制策略在应对多种复杂场景时,对于估计机械臂的模型参数不确定性和外部干扰还是不够准确。
技术实现思路
1、为克服相关技术中存在的问题,本申请实施例提供了一种基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,能够在多种复杂场景下,提高估计机械臂的模型参数不确定性和外部干扰的准确性。
2、本申请是通过如下技术方案实现的:
3、第一方面,本申请实施例提供了基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,包括:
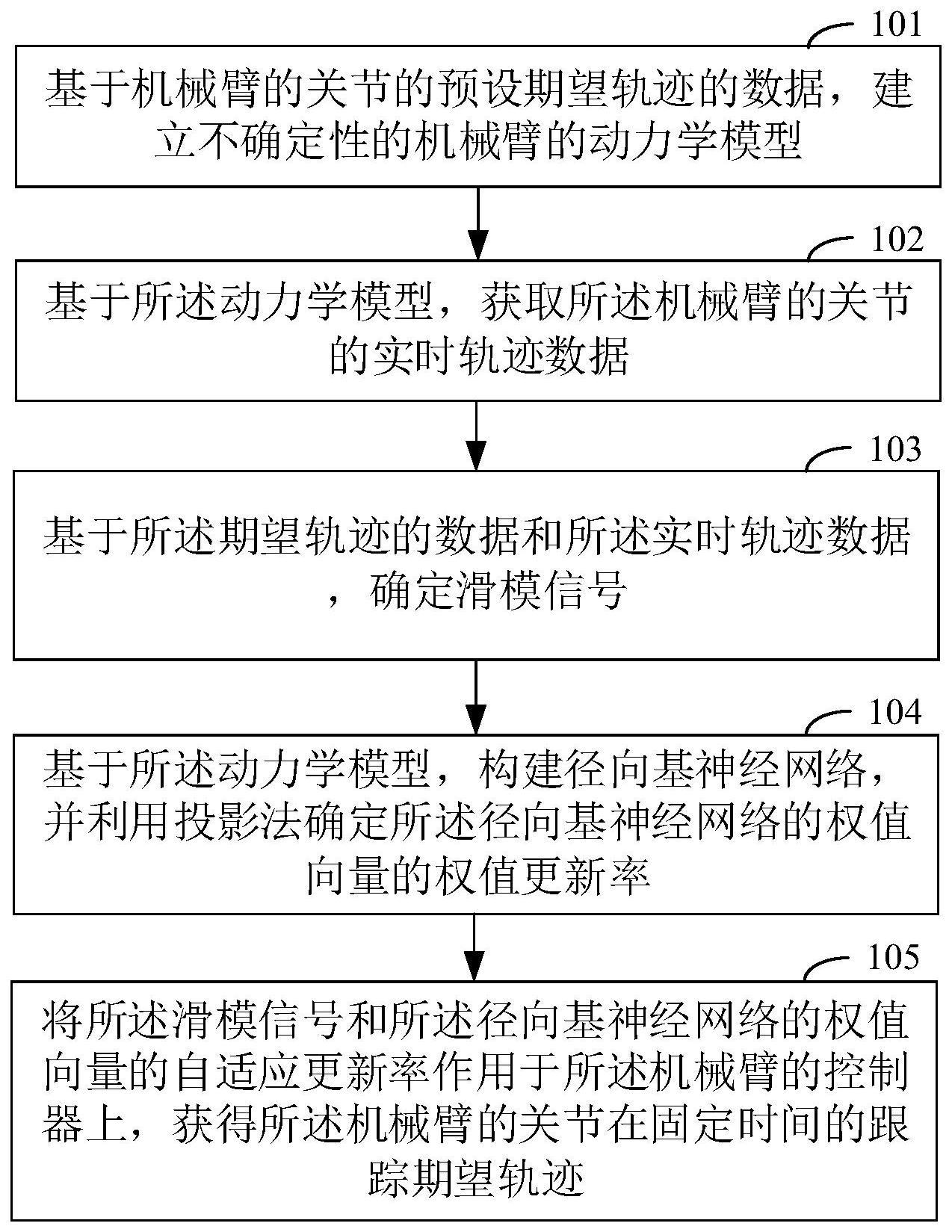
4、基于机械臂的关节的预设期望轨迹的数据,建立不确定性的机械臂的动力学模型;
5、基于动力学模型,获取机械臂的关节的实时轨迹数据;
6、基于期望轨迹的数据和实时轨迹数据,确定滑模信号;
7、基于动力学模型,构建径向基神经网络,并利用投影法确定径向基神经网络的权值向量的权值更新律;
8、将滑模信号和径向基神经网络的权值向量的自适应更新律作用于机械臂的控制器上,获得机械臂的关节在固定时间的跟踪期望轨迹。
9、在第一方面的一种可能的实现方式中,机械臂动力学模型表示为:
10、
11、其中,q为所述机械臂的关节的加速度信号,为q的二阶导数;m为机械臂的惯性矩阵;τ为控制力矩;为由机械臂的参数不确定性和外部扰动构成的模型不确定性,其中,m(q)=m0(q)+mδ(q)∈rn×n;g(q)=g0(q)+gδ(q)∈rn是重力向量;是离心科氏力矩阵;d∈rn是有界外部干扰力矩。
12、在第一方面的一种可能的实现方式中,基于期望轨迹的数据和实时轨迹数据,确定滑模信号,包括:
13、将机械臂的关节的实时轨迹数据与预先设计的期望轨迹的数据,得到误差信号;
14、基于误差信号将不确定性的机械臂的动力学模型重构为二阶系统;
15、基于二阶系统设计非奇异快速终端滑模面,构造滑模信号。
16、在第一方面的一种可能的实现方式中,误差信号表示为:
17、
18、其中,e1和e2为误差信号,x1(t)=q(t),xd(t)=qd(t),为xd的导数,q(t)为所述机械臂的关节的位置信号,为q(t)的导数,qd(t)为所述机械臂的关节考虑外部干扰力矩的位置信号。
19、在第一方面的一种可能的实现方式中,滑模信号表示为:
20、
21、其中,为滑模变量的系数,该系数为与误差e1相关的时变系数,用对角矩阵表示,其中,i=1,2,…,n,α,β,p,g,k是常数,且α>0,β>0,k>1,v1>1,并且p,g满足gk>1,1/v1<pk<1。
22、在第一方面的一种可能的实现方式中,基于动力学模型,构建径向基神经网络,并根据投影法设计径向基神经网络的权值向量的自适应更新律,包括:
23、根据近似原理,构建径向基函数,即径向基神经网络;
24、根据径向基函数,确定径向基函数对非线性函数的最优逼近方程;
25、选择高斯函数作为径向基神经网络的激活函数;
26、基于最优逼近方程和径向基神经网络的激活函数确定径向基函数对动力学模型的不确定性逼近后的输出向量;
27、基于径向基函数对动力学模型的不确定性逼近后的输出向量定义径向基神经网络的逼近误差;
28、基于径向基函数对动力学模型的不确定性逼近后的输出向量和径向基神经网络的逼近误差,以及利用投影法确定径向基神经网络的权值向量的权值更新律。
29、在第一方面的一种可能的实现方式中,径向基函数对动力学模型的不确定性逼近后的输出向量表示为:
30、
31、其中,wi=[wi1,wi2,…,wim]t是权值向量,zi=[e1i,e2i]t是神经网络的输入;σi=[σi1,σi2,…,σim]t∈rm表示激活函数;
32、径向基神经网络的逼近误差表示为:
33、
34、其中,表示最优权值向量。
35、在第一方面的一种可能的实现方式中,利用投影法确定径向基神经网络的权值向量的权值更新律,包括:
36、设计径向基神经网络的权值向量的更新律;
37、修正径向基神经网络的权值向量的更新律;
38、利用投影法确保权值向量的有界性,确定最终的径向基神经网络的权值向量的权值更新律;最终的径向基神经网络的权值向量的权值更新律表示为:
39、
40、其中,ρi和ξi是有界的;δ是神经网络的学习速率,δ>0;常向量满足
41、在第一方面的一种可能的实现方式中,机械臂的控制器的控制力矩表示为:
42、
43、其中,m0机械臂的惯性矩阵;v1、v2、v3、v4是常数;为滑模变量的系数,是两个对角矩阵;ks为控制器参数;为xd的二阶导数。
44、第二方面,本申请提供了一种终端设备,包括存储器和处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如第一方面任一项所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法。
45、本申请实施例与现有技术相比存在的有益效果是:
46、本申请实施例,通过将滑模信号和利用投影法确定所述径向基神经网络的权值向量的权值更新律结合,能够实现在机械臂的动力学模型不确定的情况下关节运动可以快速跟踪期望轨迹,能够确保权值向量的有界性,应对机械臂控制的多种复杂场景,提高估计机械臂的模型参数不确定性和外部干扰的准确性。
47、可以理解的是,上述第二方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
48、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本说明书。
技术特征:
1.一种基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,包括:
2.如权利要求1所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,机械臂动力学模型表示为:
3.如权利要求1所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,所述基于所述期望轨迹的数据和所述实时轨迹数据,确定滑模信号,包括:
4.如权利要求3所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,所述误差信号表示为:
5.如权利要求4所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,所述滑模信号表示为:
6.如权利要求1所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,所述基于所述动力学模型,构建径向基神经网络,并根据投影法设计所述径向基神经网络的权值向量的自适应更新律,包括:
7.如权利要求5或6所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,径向基函数对所述动力学模型的不确定性逼近后的输出向量表示为:
8.如权利要求7所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,利用投影法确定所述径向基神经网络的权值向量的权值更新律,包括:
9.如权利要求8所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,其特征在于,所述机械臂的控制器的控制力矩表示为:
10.一种终端设备,包括存储器和处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至9任一项所述的基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法。
技术总结
本申请适用于轨迹跟踪技术领域,提供了一种基于非奇异终端滑模的机械臂固定时间轨迹跟踪控制方法,该方法包括:基于预先设计的机械臂的关节的期望轨迹的数据,建立不确定性的机械臂的动力学模型;基于动力学模型,获取机械臂的关节的实时轨迹数据;基于期望轨迹的数据和实时轨迹数据,确定滑模信号;基于动力学模型,构建径向基神经网络,并利用投影法确定径向基神经网络的权值向量的权值更新律;将滑模信号和径向基神经网络的权值向量的自适应更新律作用于机械臂的控制器上,获得机械臂的关节在固定时间的跟踪期望轨迹。本申请的方法能够在多种复杂场景下,提高估计机械臂的模型参数不确定性和外部干扰的准确性。
技术研发人员:曹胜杰,雷宇,吴海,吴爱华,赵英伟,程壹涛,王峻澎,王辉
受保护的技术使用者:中国电子科技集团公司第十三研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!