一种机器人颈椎关节速度控制装置及控制方法与流程
本技术涉及机器人,特别涉及一种机器人颈椎关节速度控制装置及控制方法。
背景技术:
1、机器人能模仿人手和臂的某些动作,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机器人包括手部、臂部及机器人关节,机器人关节用以将该手部及臂部相互连接以使手部能相对于臂部实现多自由度运动,特别是一些类人机器人的颈椎关节的转动速度的控制尤为重要,其中一般通过减速器进行控制。
2、现有技术中一般减速器主要包括摆线针轮齿轮箱,普通行星齿轮箱,蜗轮蜗杆齿轮箱和谐波齿轮箱,普通单级和双级行星齿轮箱的减速比范围较小,蜗轮蜗杆齿轮箱减速比较大,但是输入转速低应用范围受限,目前应用最关键的是摆线针轮减速箱为曲轴驱动,传动精度较高,机构复杂,加工工艺要求极高;谐波减速箱是面接触多齿啮合,结构紧密但是输出为弹性片式杯型环,啮合位与输出部须弹性变形,结构抗冲击性交叉,因此随着新技术的发展和应用对齿轮箱及关节的要求持续不断提高。另外,现有一种通过双变厚行星齿轮驱动双变厚行星齿圈的传动结构,但该结构输出的间隙和回程差较大,同时,双变厚齿轮加工工艺比较复杂,需要通过一个花键或者非圆结构连接起来,导致间隙调整较为困难。
3、以上的所介绍的减速的结构复杂,并且制造成本较低,因此亟需要一种结构简单、制造成本较低的减速结构,以控制颈椎关节的转动速。
技术实现思路
1、本技术实施例提供一种机器人颈椎关节速度控制装置及控制方法,以解决相关技术中颈椎关节的减速器结构复杂、制造成本较高的问题。
2、第一方面,提供了一种机器人颈椎关节速度控制装置,包括:
3、保护筒,其一端同轴连接有驱动电机,并且其内设有转轴,转轴的一端与驱动电机的输出轴连接,另一端从保护筒中穿设而出,并用于和负载连接;
4、多个减速组件,其设置在所述保护筒内,并且以所述保护筒的中心轴为圆心呈圆形分布;每个减速组件包括第一电磁铁片和第一磁性片,第一电磁铁片与所述保护筒的内壁连接,第一磁性片通过柔性片与保护筒的内壁连接,并悬置在保护筒的内部,其中第一磁性片与对应的第一电磁铁片均位于同一个半径上;第一磁性片靠近转轴的一侧设有磁力隔绝片,电磁隔绝片上设有摩擦块;
5、供电线圈,其设置在所述保护筒的外侧,并通过内设有电线的连接柱与多个所述减速组件连接;供电线圈上设有电线接口。
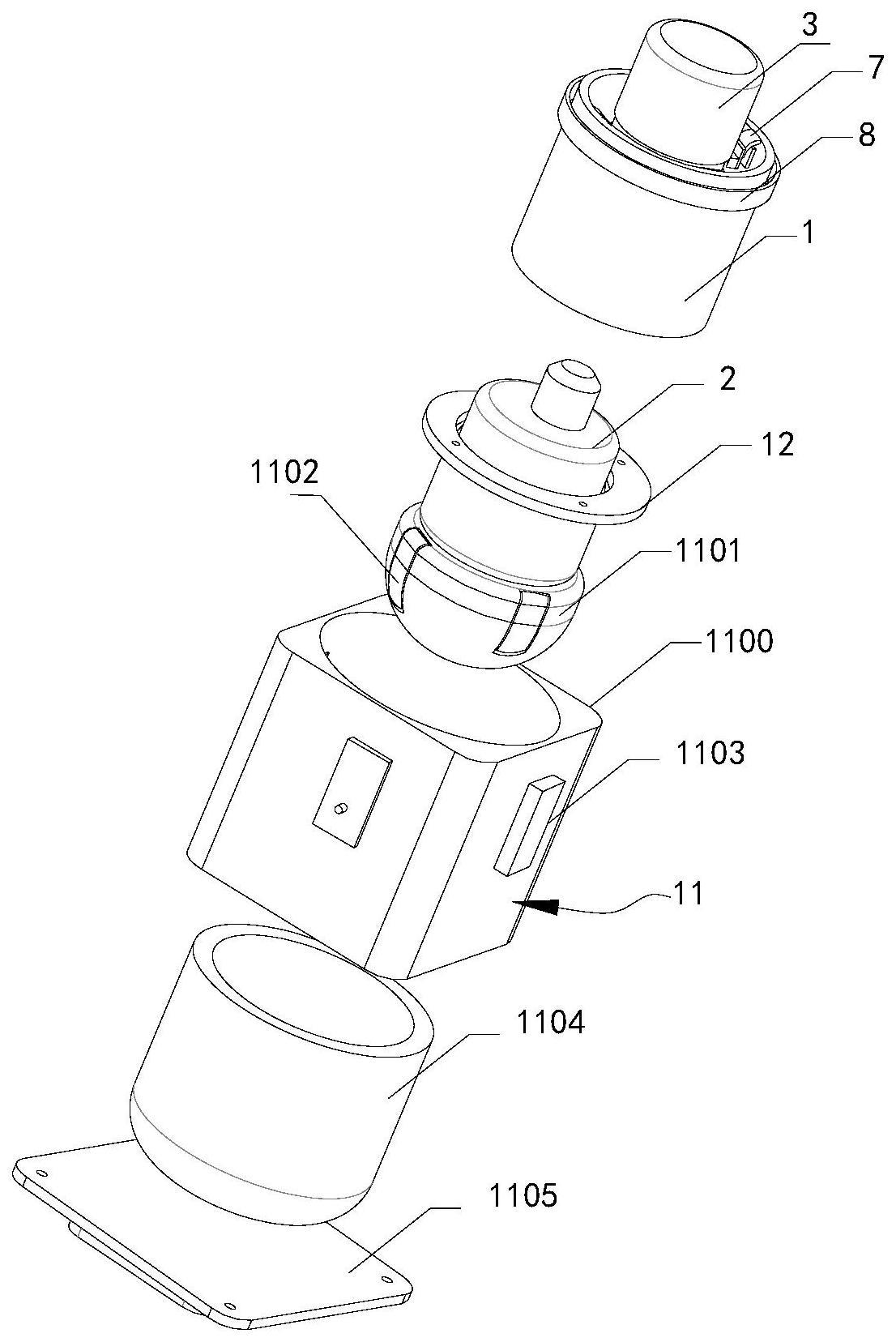
6、一些实施例中,还包括姿态调节装置,姿态调节装置与所述电机远离其输出轴的一端连接,以用于调节负载的姿态。
7、一些实施例中,所述姿态调节装置包括:
8、基座,其内设有球形空间,并且一端具有与球形空间连通的开口;
9、芯柱,其与一端与所述电机连接,另一端设有穿设开口,并位于球形空间内的球形部;球形部的外侧设有多个第二磁性片;多个第二磁性片以球心为中心成圆形分布;
10、多个第二电磁铁片,其多个所述第二磁性片一一对应,并安装所述基座上;
11、橡胶支撑部,其设置在所述球形部和球形空间的内壁之间。
12、一些实施例中,所述橡胶支撑部的外表面涂覆有润滑剂。
13、一些实施例中,所述球形部的外表面上开设有安装槽,第二磁性片设置在安装槽内,以使第二磁性片的外表面与所述球形部的外表面形成完整的球面。
14、一些实施例中,基座包括两端开口的矩形外壳,矩形外壳的其中一个开口密封连接有密封盖,密封盖上设有安装块。
15、一些实施例中,所述驱动电机上设有安装圈,所述保护筒的端部上设有螺纹孔,安装圈通过安装螺钉与螺纹孔连接。
16、一些实施例中,所述柔性片采用硅胶材料制成。
17、一些实施例中,所述转轴的外表面上设有与摩擦块接触的耐磨层;或,
18、所述转轴的外表面上设有与摩擦块对应的环形槽,环形槽内设有耐磨环。
19、第二方面,提供了一种种机器人颈椎关节速度控制方法,其包括:
20、提供机器人颈椎关节速度控制装置,并安装在机器人的颈椎关节处;
21、获取控制指令,并按照如下方式进行控制:
22、当控制指令为需要使转轴停止转动时,控制驱动电机的电源关闭的同时,控制供电线圈使所述第一电磁铁片通电,并产生合适的磁力,以使所述第一磁性片的摩擦块向转轴移动,最终对转轴锁紧;
23、当控制指令为需要将转轴的转速快速下降至需要转速时,控制驱动电机的转速的同时,控制供电线圈使所述第一电磁铁片通电,并产生合适的磁力,以使所述第一磁性片的摩擦块向转轴移动,最终对转轴施加合适的阻力,以抵消惯性的影响,快速达到需要转速;
24、当控制指令不需要减速时,控制供电线圈使所述第一电磁铁片断通电。
25、本技术提供的技术方案带来的有益效果包括:
26、(1)本技术实施例提供了一种机器人颈椎关节速度控制装置及控制方法,由于转轴的一端与驱动电机的输出轴连接,另一端从保护筒中穿设而出,并用于和负载连接;多个减速组件设置在保护筒内,并且以保护筒的中心轴为圆心呈圆形分布;每个减速组件包括第一电磁铁片和第一磁性片,第一电磁铁片与保护筒的内壁连接,第一磁性片通过柔性片与保护筒的内壁连接,并悬置在保护筒的内部,其中第一磁性片与对应的第一电磁铁片均位于同一个半径上;第一磁性片靠近转轴的一侧设有磁力隔绝片,电磁隔绝片上设有摩擦块;供电线圈设置在保护筒的外侧,并通过内设有电线的连接柱与多个减速组件连接;在使用时,当控制指令为需要使转轴停止转动时,控制驱动电机的电源关闭的同时,控制供电线圈使第一电磁铁片通电,并产生合适的磁力,以使第一磁性片的摩擦块向转轴移动,最终对转轴锁紧;当控制指令为需要将转轴的转速快速下降至需要转速时,控制驱动电机的转速的同时,控制供电线圈使第一电磁铁片通电,并产生合适的磁力,以使第一磁性片的摩擦块向转轴移动,最终对转轴施加合适的阻力,以抵消惯性的影响,快速达到需要转速;通过以上的设置利用磁力推动摩擦块产生阻力,避免惯性的影响,从而准确快速控制转速,其结构简单,制造成本较低,只需要控制产生的磁力就可以。
27、(2)由于磁力隔绝片可以避免在常态下,第一磁性片与转轴相互靠近的情况的发生,因为我们需要的是第一磁性片与第一电磁铁片之间的磁力,而不是第一磁性片与转轴之间的磁力。
28、(3)姿态调节装置包括基座,其内设有球形空间,并且一端具有与球形空间连通的开口;芯柱,其与一端与所述电机连接,另一端设有穿设开口,并位于球形空间内的球形部;球形部的外侧设有多个第二磁性片;多个第二磁性片以球心为中心成圆形分布;多个第二电磁铁片,其多个所述第二磁性片一一对应,并安装所述基座上;橡胶支撑部,其设置在所述球形部和球形空间的内壁之间;通过以上的结构设置,在常态下所有第二电磁铁片均通电,其与第二磁性片之间产生的磁力相互抵消,可以使球形部的姿态稳定,当需要球形部偏置时,控制对应侧的第二磁性片电流减小,其余的第二磁性片电流增大,从而实现调节。其中橡胶支撑部的设置是为提供一定的支撑力,保持姿态稳定,并且利用其具有弹力的特性使球形部具有一些复位的功能。
- 还没有人留言评论。精彩留言会获得点赞!