一种基于智能图像识别的电力巡检用机器人及其使用方法与流程
本发明涉及电力巡检,具体为一种基于智能图像识别的电力巡检用机器人及其使用方法。
背景技术:
1、随着电力系统大规模扩展,为了保障电力系统的正常运维,通常需要对变电站、电厂、线路设备等进行电力巡检,然而现有的电力巡检大多采用机器人进行巡检,在巡检时并不能针对不同的永磁轨道来进行合理的更换,灵活性较差,存在一定的缺陷。
2、现有的电力巡检用机器人存在的缺陷是:
3、1、专利文件cn214154115u,尤其为一种无人机电力巡检装置,包括无人机主体,所述无人机主体的上侧基面设置有光伏电池板,所述安装板的下侧安装有电力巡检组件,所述电力巡检组件包括连接盘、连接杆、装载座、安装架、电力巡检控制器、驱动马达和电力巡检摄像机,所述安装架的基面通过固定限位板安装有电力巡检摄像机,所述无人机主体的下侧面均设置有避障感应器,通过光伏电池板能够对无人机主体的电池进行持续续航,提高无人机主体巡检续航能力,通过电力巡检组件能够对无人机主体经过的地方进行巡检,通过避障感应器能够对无人机主体周围的情况进行感应,实现了综合避障,提高了无人机适应于特殊地形和复杂环境下的巡视要求,但是上述公开文件中的电力巡检用机器人主要考虑通过避障传感器来提高文人际适应特殊地形和复杂环境的要求,并没有考虑到现有的电力巡检用机器人并不方便根据轨道形状的不同选用适配的清扫装置,灵活性较差;
4、2、专利文件cn209056851u,涉及电力巡检机器人技术领域,包括电力巡检机器人、前机械操作臂、后机械操作臂、驱动轮a和驱动轮b,在电力巡检机器人前机械操作臂和后机械操作臂的上端分别设有通过电机a、电机b连接的驱动轮a、驱动轮b,驱动轮a、驱动轮b的方向为相反设置,且均行走在高压输电地线上,在前机械操作臂的内侧面、后机械操作臂的外侧面上均设有夹持装置,该实用新型通过电机c、电机d驱动支撑杆a、支撑杆b转动,使支撑杆a、支撑杆b上的导向轮a、导向轮b分别与驱动轮a、驱动轮b夹紧或松开高压输电线路,完成行走及越障工作,安全可靠,提高了巡检工作的效率,但是上述公开文件中的电力巡检用机器人主要考虑通过安全越障来提高巡检的工作效率,并没有考虑到现有的电力巡检装置在户外使用时,冬季雨雪天气容易使永磁轨道积雪或结冰,极易影响巡检机器人行走;
5、3、专利文件cn214293135u,尤其是涉及一种多自由度电力巡检机器人,其包括驱动车体、升降机构、承接台及采集摄像头,所述升降机构包括固定在驱动车体上的固定板和设置在固定板上的两组十字交叉轴,两组所述十字交叉轴交叉处设置有连接杆,所述连接杆与固定板之间设置有驱动气缸,所述驱动气缸远离驱动气缸活塞杆一端铰接在固定板上,所述驱动气缸活塞杆端口处转动连接在连接杆上。本技术在驱动车体上设置升降机构,位于升降机构上的采集摄像头能够上下移动,方便采集摄像头采集不同高度的电器数据,进而增加电力巡检机器人巡测电器设备的类型,提升了电力巡检机器人的巡测效果,但是上述公开文件中的电力巡检用机器人主要考虑通过升降机构来调动采集摄像头上下移动,使得能够对不同高度的电器进行巡检,从而提高巡检效果,并没有考虑到现有的巡检机器人在户外使用时,当空中漂浮的塑料袋等落在摄像头上时,极易影响巡检的进行;
6、4、专利文件cn216161016u,公开了电力巡检机器人,包括双光球台、激光雷达、双目相机、超声波雷达及中央处理器;所述双光球台与所述中央处理器信号连接,用于发送待识别图像信号至中央处理器,使所述中央处理器根据所述待识别信号确定电力缺陷和/或仪表读数;所述中央处理器分别与所述激光雷达、所述双目相机及所述超声波雷达信号连接,用于根据从所述激光雷达、所述双目相机及所述超声波雷达中至少一处接收到的信号确定周围环境中的障碍物。该实用新型通过将最佳识别范围不同的激光雷达、双目相机及超声波雷达相结合,保障对电力巡检机器人对不同距离内的障碍物都能保持较高的识别率;增加了所述电力巡检机器人的工作稳定性,但是上述公开文件中的电力巡检用机器人主要考虑如何提高巡检机器人工作时的稳定性,并没有考虑到现有的巡检机器人在夜间使用时光照效果较差的问题,实用性较差。
技术实现思路
1、本发明的目的在于提供一种基于智能图像识别的电力巡检用机器人及其使用方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于智能图像识别的电力巡检用机器人,包括安装箱,所述安装箱的两侧外壁均安装有连接块,两组所述连接块的外表面均设置有卡槽,且卡槽呈“u”字形结构,两组所述卡槽的一侧内壁均安装有插杆;
3、两组所述卡槽的内部均嵌合安装有卡块,两组所述卡块相互靠近的表面均设置有插孔,且插孔与插杆相嵌合,两组所述卡块相互远离的表面均安装有前后布置的连接板,且连接板呈“l”字形结构,所述置物块一为中空结构,所述连接块、卡块以及连接板的正面均贯穿设置有螺纹孔,所述螺纹孔的内部安装有螺杆,所述卡块的外表面安装有支撑杆;
4、所述支撑杆的顶端安装有置物块一。
5、优选的,所述置物块一的一侧外壁设置有对称布置的插槽,插槽的一侧内壁内嵌安装有铁块,两组插槽的内部均嵌合安装有插块,两组插块的一侧外壁均安装有磁块,两组插块相互靠近的表面安装有置物块二,置物块一和置物块二的内表面均粘接有毛刷,置物块一的内部安装有电热丝。
6、优选的,所述安装箱的底壁安装有支撑板,支撑板的一侧外壁安装有电动推杆,电动推杆的输出端贯穿安装箱的正面安装有衔接块,衔接块的外表面安装有衔接杆,安装箱的正面安装有置物板,且置物板位于衔接杆的一侧,置物板的底部安装有液压伸缩杆,液压伸缩杆的输出端安装有连接杆,连接杆的外表面安装有推板。
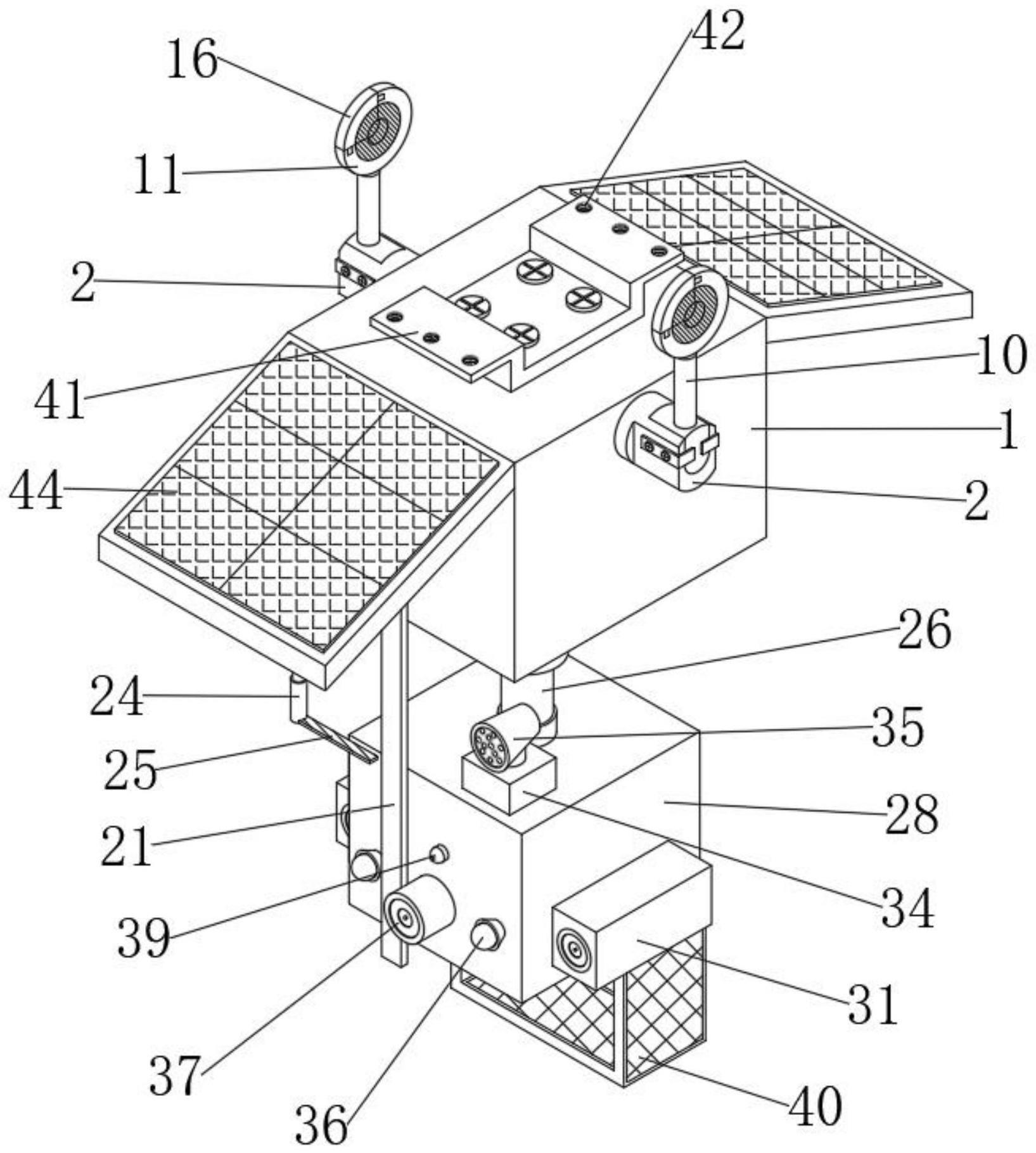
7、优选的,所述安装箱的顶壁安装有液压推杆,液压推杆的输出端贯穿安装箱的底壁安装有连接套,连接套的底部安装有巡检机器人主体,巡检机器人主体的两侧内壁均贯穿设置有槽孔一,巡检机器人主体的两侧内壁均安装有转动电机,两组转动电机的输出端均穿过槽孔一的内部安装有红外摄像仪,巡检机器人主体的顶部贯穿设置有槽孔二,巡检机器人主体的顶壁安装有伺服电机,伺服电机的输出端穿过槽孔二的内部安装有储电盒,储电盒的输出端安装有强光灯,巡检机器人主体的正面安装有对称布置的照明灯。
8、优选的,所述置物块一呈“c”字形结构,前方连接板的背面以及后方连接板的正面分别与连接块的正面和背面相贴合;
9、置物块二呈弧状,置物块二与置物块一组合成圆形,磁块的一侧外壁与铁块的一侧外壁相贴合;
10、电动推杆能够带动衔接块沿着垂直方向移动,推板能够在液压伸缩杆的带动下上下移动,推板位于衔接杆的前方;
11、强光灯呈倾斜状布置,强光灯能够在储电盒的带动下转动,槽孔二位于连接套的侧前方,红外摄像仪分别位于巡检机器人主体的两侧。
12、优选的,所述巡检机器人主体的正面安装有激光测距仪,巡检机器人主体的底部安装有储物网框。
13、优选的,所述巡检机器人主体的正面安装有高清摄像机,且高清摄像机位于两组照明灯的中间,高清摄像机位于激光测距仪的下方,衔接杆位于其中一组照明灯和高清摄像机的中间,巡检机器人主体的底壁安装有蓄电池,且蓄电池与红外摄像仪、照明灯、太阳能电池板以及高清摄像机之间电性连接。
14、优选的,所述安装箱的正面和背面均安装有挡板,前方挡板位于衔接块和置物板的上方,两组挡板的顶部均安装有太阳能电池板,且太阳能电池板与蓄电池之间电性连接,安装箱的顶部通过螺栓固定有安装板,且安装板的截面呈倒“凸”字形,安装板的顶部贯穿设置有均匀布置的安装孔。
15、优选的,该电力巡检机器人的使用方法如下:
16、s1、在使用该电力巡检机器人前,首先根据永磁轨道的形状来选择相适配的置物块一的形状,接着就能够将卡块插入卡槽的内部,使得插杆能够与插孔嵌合;
17、s2、当该电力巡检用机器人在户外使用时,冬季就能够启动置物块一内的电热丝,使其能够加热至适当温度,从而能够将热量传递给毛刷,并通过移动装置在永磁轨道上移动而不断地融化清扫堆积在永磁轨道上的冰块或积雪,从而在一定程度上能够提高冬季巡检时的安全性;
18、s3、在使用该巡检机器人主体进行电力巡检操作时,通过高清摄像机以及红外摄像仪来进行电力巡检,并在巡检过程中根据需要启动转动电机来带动红外摄像仪转动,从而达到调节红外摄像仪拍摄角度的目的;
19、s4、当激光测距仪检测到有遮挡物存在时,支撑板上的电动推杆启动,从而能够在衔接块的作用下带动衔接杆沿着垂直方向移动,使得衔接杆能够将遮挡物挑起,接着启动置物板上的液压伸缩杆,从而带动连接杆向下移动,直至使推板能够推动衔接杆上的遮挡物,使得遮挡物能够飘走或随风落入储物网框的内部。
20、优选的,在所述步骤s1中,还包括如下步骤:
21、s11、当卡块移动至与卡槽相嵌合后,连接板会卡在连接块的两侧,接着就能够将螺杆拧入螺纹孔的内部,从而通过螺杆将卡块牢牢地固定在连接块上;
22、s12、接着通过安装板上的安装孔将安装箱与固定在永磁轨道上的移动装置连接,并使永磁轨道能够位于毛刷的内部,接着将插块插入插槽的内部,并通过磁块与铁块的吸合来将置物块二与置物块一组合在一起;
23、在所述步骤s3中,还包括如下步骤:
24、s31、在夜间进行电力巡检时,可以启动照明灯或强光灯,从而辅助拍摄,当启动伺服电机时,能够在储电盒的作用下带动强光灯转动,从而调节光照角度,进而在一定程度上能够提高巡检的效率;
25、在所述步骤s4中,还包括如下步骤:
26、s41、通过挡板的设置,能够起到一定的遮挡作用,且能够在晴朗天气通过太阳能电池板将热能转化为电能,并存储在蓄电池中,以用作备用电源。
27、与现有技术相比,本发明的有益效果是:
28、1、本发明通过安装有安装箱、卡槽、卡块、插孔、插杆、螺纹孔、连接板、螺杆和置物块一,在使用该电力巡检机器人前,首先根据需要选择带有合适形状置物块一的支撑杆,并将卡块插入连接块上的卡槽中,从而能够将插杆插入插孔的内部,使得连接板能够插在连接块的两侧,接着就可以将螺杆拧入螺纹孔的内部,然后就能够将卡块牢牢地固定在连接块上,从而在一定程度上能够根据实际永磁轨道的形状选择相适配形状的置物块一,进而有利于提高后续使用时的灵活性。
29、2、本发明通过安装有插槽、插块、磁块、铁块、置物块二、毛刷和电热丝,将置物块一套在需要连接的永磁轨道上,并将置物块二上的插块插入插槽的内部,直至使磁块能够与铁块相吸合为止,接着就可以将置物块一和置物块二组合在一起,从而使得毛刷能够包裹在永磁轨道的外表面,当该电力巡检用机器人在室外使用时,冬季时,启动置物块一内的电热丝,使其加热到一定温度,从而能够将热量传递给毛刷以及永磁轨道,并随着巡检机器人主体的移动来带动毛刷清扫永磁轨道上的落雪,进而在一定程度上能够提高该电力巡检用机器人的实用性。
30、3、本发明通过安装有支撑板、电动推杆、衔接块、衔接杆、置物板、液压伸缩杆、连接杆和推板,在室外巡检过程中,当外界空中飘浮的塑料袋等物件遮挡住高清摄像机时,启动支撑板上的电动推杆,从而能够带动衔接块上的衔接杆沿着竖直方向移动,直至使衔接杆能够将塑料袋等遮挡物挑起,接着启动液压伸缩杆,从而带动推板向下推动遮挡物,直至使遮挡物从衔接杆上的掉落为止,进而在一定程度上能够提高电力巡检的安全性。
31、4、本发明通过安装有液压推杆、巡检机器人主体、转动电机、红外摄像仪、伺服电机、强光灯和照明灯,在夜间,或光线较弱的环境下,启动照明灯来辅助高清摄像机进行拍摄,或启动强光灯辅助巡检,在此过程中,能够启动液压推杆来带动巡检机器人主体上下移动,启动转动电机,能够带动红外摄像仪转动,从而达到调节红外摄像仪拍摄角度的目的,启动伺服电机,接着就可以在储电盒的作用下带动强光灯转动,从而能够为不同方向,不同位置进行照射。
- 还没有人留言评论。精彩留言会获得点赞!