轴孔装配方法、系统、电子设备及存储介质与流程
本申请涉及机器人与智能制造领域,具体而言,本申请涉及一种轴孔装配方法、系统、电子设备及存储介质。
背景技术:
1、零件装配在工业制造领域应用十分广泛,传统的手工零件装配耗费了大量的人力和物力,零件装配的成功极大依赖于装配操作人员的技术,利用机器人装配代替传统手工装配已经逐渐成为装配自动化和智能化的趋势。
2、公开号为cn114918637a的说明书公开了一种轴孔装配机器人的视觉定位方法,先根据不同零件示教出不同的初始位置,再根据视觉引导调整偏差进行装配。这种方法简单、快捷,机器人只需要一步就能完成任务。
3、公开号为cn114012716a的说明书使用力结合视觉进行轴孔装配,公开了一种将力与视觉信息结合的装配方法,使用边缘检测算法提取轴孔轮廓,定位孔的位置。之后在导纳控制下,将轴与工件表面力控制在一个范围,最终达到孔的位置。这种方法克服了螺旋法搜孔速度慢的缺点。
4、现有技术虽然能够进行轴孔装配,一方面是建立在精准视觉的基础上的,需要高精度昂贵的摄像头,在视觉不准确、光照等影响下就无法完成装配任务;另一方面,视觉结合力信息的方法效率低,在搜孔阶段需要花费大量成本,而强化学习的方法收敛慢、训练时间长、容易陷入局部最优解。
5、由上可知,如何提升搜孔准确率从而提升装配效率的问题仍有待解决。
技术实现思路
1、本申请各实施例提供了一种轴孔装配方法、系统、电子设备及存储介质,可以解决相关技术中存在的搜孔准确率低,装配效率不高的问题。所述技术方案如下:
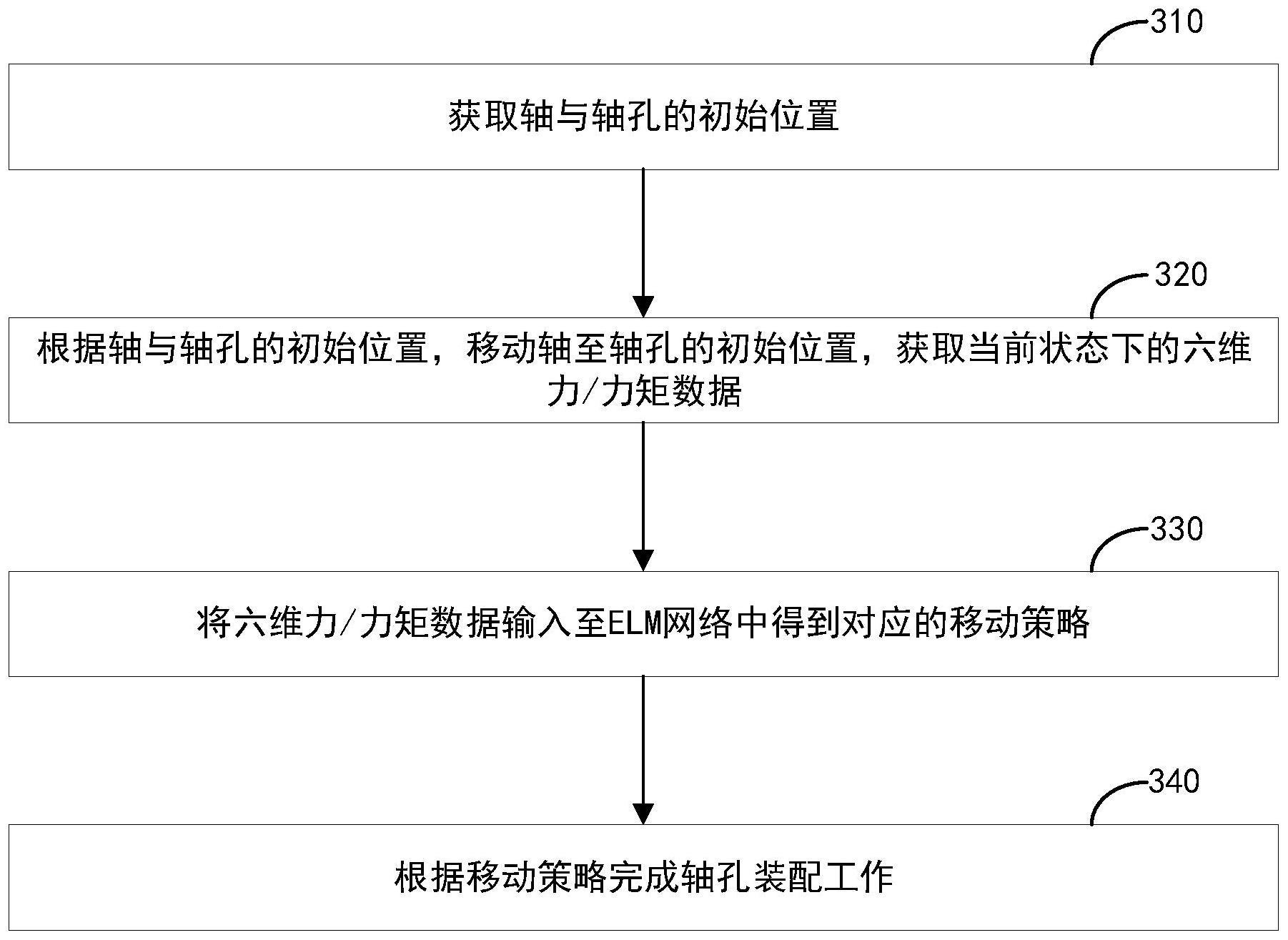
2、根据本申请实施例的一个方面,一种轴孔装配方法,所述方法包括:获取轴与轴孔的初始位置;根据所述轴与轴孔的初始位置,移动轴至轴孔的初始位置,获取当前状态下的六维力/力矩数据;将所述六维力/力矩数据输入至elm网络中得到对应的移动策略;所述elm网络是基于elm算法构建并训练得到的;根据所述移动策略完成轴孔装配工作。
3、根据本申请实施例的一个方面,一种轴孔装配系统,所述系统包括:位置获取模块,用于获取轴与轴孔的初始位置;数据获取模块,用于根据轴与轴孔的初始位置,移动轴至轴孔的初始位置,获取当前状态下的六维力/力矩数据;装配辅助模块,用于将力矩数据输入至elm网络中得到对应的移动策略;工件装配模块,用于根据移动策略完成轴孔装配工作。
4、根据本申请实施例的一个方面,一种电子设备,包括:至少一个处理器、至少一个存储器、以及至少一条通信总线,其中,存储器上存储有计算机程序,处理器通过通信总线读取存储器中的计算机程序;计算机程序被处理器执行时实现如上所述的轴孔装配方法。
5、根据本申请实施例的一个方面,一种存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上所述的轴孔装配方法。
6、根据本申请实施例的一个方面,一种计算机程序产品,计算机程序产品包括计算机程序,计算机程序存储在存储介质中,计算机设备的处理器从存储介质读取计算机程序,处理器执行计算机程序,使得计算机设备执行时实现如上所述的轴孔装配方法。
7、本申请提供的技术方案带来的有益效果是:
8、在上述技术方案中,获取轴与轴孔的初始位置;
9、根据轴与轴孔的初始位置,移动轴至轴孔的初始位置,获取当前状态下的六维力/力矩数据;将六维力/力矩数据输入至elm网络中得到对应的移动策略;elm网络是基于elm算法构建并训练得到的;根据移动策略完成轴孔装配工作,通过将视觉信息与力信息相结合,利用elm网络进行高效率搜孔,从而能够有效地解决相关技术中存在的搜孔准确度低,装配效率不高的问题。
技术特征:
1.一种轴孔装配方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述获取轴与轴孔的初始位置包括:
3.如权利要求1所述的方法,其特征在于,所述根据所述移动策略完成轴孔装配工作,包括:
4.如权利要求1所述的方法,其特征在于,所述elm网络的构建公式为:
5.如权利要求4所述的方法,其特征在于,所述elm网络的目标函数为:
6.如权利要求1所述的方法,其特征在于,所述elm网络的训练过程包括:
7.如权利要求6所述的方法,其特征在于,所述状态标签包括:
8.一种轴孔装配系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,包括:至少一个处理器、至少一个存储器、以及至少一条通信总线,其中,
10.一种存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的轴孔装配方法。
技术总结
本申请实施例提供了一种轴孔装配方法、系统、电子设备及存储介质,涉及机器人与智能制造技术领域。其中,该方法包括:获取轴与轴孔的初始位置;根据所述轴与轴孔的初始位置,移动轴至轴孔的初始位置,获取当前状态下的六维力/力矩数据;将所述六维力/力矩数据输入至ELM网络中得到对应的移动策略;所述ELM网络是基于ELM算法构建并训练得到的;根据所述移动策略完成轴孔装配工作。本申请实施例解决了相关技术中搜孔准确率低,装配效率不高的问题。
技术研发人员:欧勇盛,盛举义,刘晟,朱兵,徐升,吴新宇
受保护的技术使用者:深圳先进技术研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!