一种防水机器人关节
本发明涉及机器人关节,具体而言,涉及一种防水机器人关节。
背景技术:
1、机器人关节,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动。关节机器人,适合用于诸多工业领域的机械自动化作业,如申请号为cn202221302134.5一种中空rv减速机机器人关节模组,包括关节输出轴、中空rv减速机、关节输入轴、关节电机、关节壳体、第一轴承座、内环编码器、关节密封盖,驱动器固定板、第二轴承座、外环编码器、断电抱闸制动器。本实用新型的中空rv减速机机器人关节模组采用轻质铝合金材料制作,可以减轻关节模组的重量,关节壳体带有多级内孔台阶结构,实现了较多轴上部件的定位,上述实用新型采用内外环双编码器结构的设计,使得机器人关节模组能被更好的控制;
2、其中在海洋检测中,也会使用到机器人关节,从而降低人员工作量的同时也保证了人员在作业时的安全性,但是现有的机器人关节在海洋检测中,因没有额外的防水结构,从而导致在海洋环境下长期作业,驱动关节处会损坏,进而需要频繁维护,并且在海洋环境下,其海内压力也会发生变化,在其压力下会导致简单的密封结构会发生泄漏的情况出现。
技术实现思路
1、针对现有技术的不足,本发明提供了一种防水机器人关节,解决了现有机器人关节不能根据海内压力不同自适应调整密封强度的问题。
2、为实现上述目的,本发明采取的技术方案为:
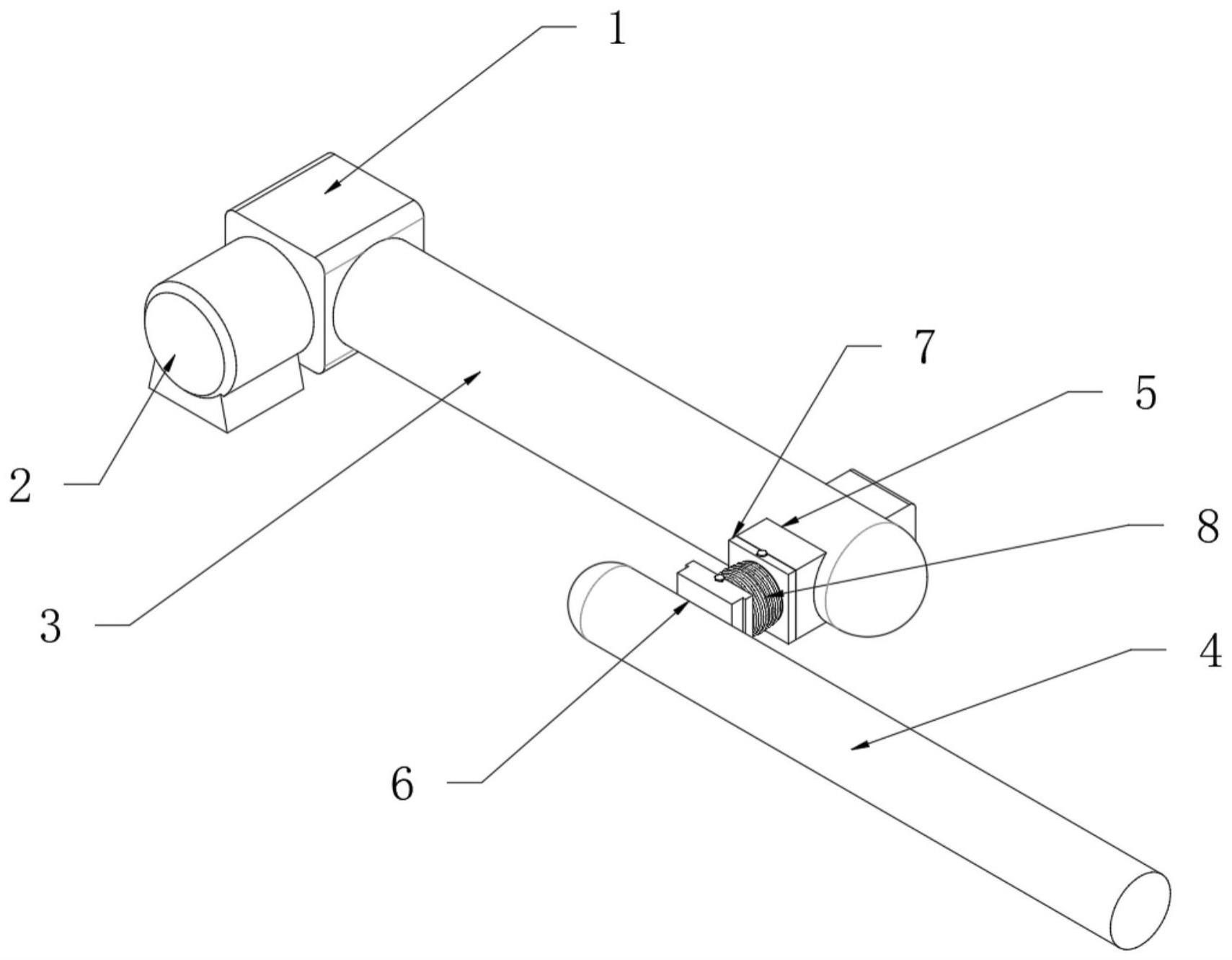
3、一种防水机器人关节,包括主关节和副关节,所述主关节一端通过传动箱与第一电机连接,所述主关节另一端设置有安装箱,所述安装箱内部设置有第二电机,所述副关节一端安装有连接座,所述连接座与第二电机连接且连接座与第二电机连接处设置有用于防水的防护组件,所述安装箱和连接座对立面分别设置有用于安装防护组件的连接组件。
4、作为优选,所述安装箱内设置有安装槽,所述安装槽内部安装有第二电机,所述第二电机的输出端固定安装有驱动轴,所述驱动轴的一端与连接座组合。
5、作为优选,所述连接组件包括有组件主板,所述组件主板板身中部贯穿开设有通孔,所述组件主板一侧固定安装有延伸环,所述组件主板表面一侧且位于延伸环外周开设有插入口。
6、作为优选,所述延伸环内壁开设有异型槽,所述插入口内部开设有密封固定槽,所述密封固定槽内部限位滑动设置有若干压持框。
7、作为优选,每个所述压持框内部中空,每两个相邻的所述压持框内部之间连接有连接插杆,每个所述连接插杆均穿插设置在对应压持框内部。
8、作为优选,所述组件主板的上方贯穿开设有螺纹孔,所述螺纹孔内部与密封固定槽连通,所述螺纹孔内部螺纹设置有丝杆,所述丝杆杆身下端与最上方的压持框转动连接,所述丝杆杆身上端固定安装有旋钮,所述旋钮下表面固定安装有密封环,所述密封环与螺纹孔密封配合。
9、作为优选,所述防护组件包括有防护软罩,所述防护软罩中部开设有组合孔,所述组合孔内部设置有限位筒,所述限位筒设置在驱动轴外周。
10、作为优选,所述防护软罩两端均设置有密封边,两端所述密封边分别插入至插入口,所述防护软罩两侧分别固定设置有扩展气囊,所述防护软罩两侧且靠近扩展气囊开设有卡和槽,所述卡和槽与延伸环密封连接。
11、作为优选,所述扩展气囊内部设置有环形储气槽,所述防护软罩中部开设有若干主储气槽,每个所述主储气槽与环形储气槽之间均贯穿开设有连接通道,所述扩展气囊与异型槽内壁密封贴合。
12、作为优选,所述组合孔内壁开设有若干连接槽,每个所述连接槽内部均活动设置有连接杆,每个所述连接杆一端均与限位筒连接,每个所述连接杆另一端均与连接槽内壁连接有连接弹簧;
13、所述限位筒内壁开设有若干滑槽,所述滑槽内部滑动设置有滚珠,每个所述滚珠均与驱动轴贴合。
14、与现有技术相比,本发明具有如下有益效果:
15、1、为了使得防护组件可以进行防水作业,通过在防护软罩两端内外圈设置有密封边和扩展气囊,实现多层防护,其中密封边起到主要固定作用,辅助密封,而扩展气囊为环式设计,从而可以对两端连接处进行主要的密封处理,从而实现防水功能的实现,其中为了实现防护,本申请当遇到压力时多个主储气槽受到挤压,随后将主储气槽内部的气体通过连接通道转移至环形储气槽中,从而实现扩展气囊的膨胀,并且扩展气囊会与异型槽内壁密封贴合,其中通过异型槽的多边设置,从而提高密封效果,进而使得本申请不仅可以对关节驱动部位进行保护的同时还可以根据压力大小实现自适应的密封强度调整,相对于现有技术中不能在海洋环境下抵御海底压力,本申请不仅通过海底压力实现对密封强度调整,还可以对海底压力进行一定程度的缓冲。
16、2、本申请为了避免驱动轴在驱动时防护软罩会对其造成干扰,通过在防护软罩内部有限位筒,并且在限位筒内壁设置有滚珠,进而避免因驱动轴在驱动时会与防护软罩接触造成额外摩擦的问题出现,从而使得本申请的驱动效率不会受到影响,其中还通过连接弹簧与连接杆连接,从而使得限位筒的位置得到一定的限制,避免限位筒位置角度变化过大会对驱动轴造成干扰;
17、为了可以安装防护组件,通过将密封边插入至插入口中并延伸至密封固定槽内,随后利用压持框将密封边固定夹持,从而实现对防护组件位置上的软固定;为了可以控制压持框对密封边的固定,通过转动旋钮,带动丝杆与螺纹孔螺纹配合,其中利用丝杆与压持框转动连接,从而使得压持框发生移动,为了保证对密封边的多边固定,通过每两个相邻的压持框内部之间连接有连接插杆,实现对多个压持框的同步控制,保证了防护组件在安装后的稳定性。
技术特征:
1.一种防水机器人关节,包括主关节(3)和副关节(4),其特征在于:所述主关节(3)一端通过传动箱(1)与第一电机(2)连接,所述主关节(3)另一端设置有安装箱(5),所述安装箱(5)内部设置有第二电机(502),所述副关节(4)一端安装有连接座(6),所述连接座(6)与第二电机(502)连接且连接座(6)与第二电机(502)连接处设置有用于防水的防护组件(8),所述安装箱(5)和连接座(6)对立面分别设置有用于安装防护组件(8)的连接组件(7)。
2.根据权利要求1所述的一种防水机器人关节,其特征在于:所述安装箱(5)内设置有安装槽(501),所述安装槽(501)内部安装有第二电机(502),所述第二电机(502)的输出端固定安装有驱动轴(503),所述驱动轴(503)的一端与连接座(6)组合。
3.根据权利要求2所述的一种防水机器人关节,其特征在于:所述连接组件(7)包括有组件主板(701),所述组件主板(701)板身中部贯穿开设有通孔(704),所述组件主板(701)一侧固定安装有延伸环(702),所述组件主板(701)表面一侧且位于延伸环(702)外周开设有插入口(7011)。
4.根据权利要求3所述的一种防水机器人关节,其特征在于:所述延伸环(702)内壁开设有异型槽(7021),所述插入口(7011)内部开设有密封固定槽(7012),所述密封固定槽(7012)内部限位滑动设置有若干压持框(705)。
5.根据权利要求4所述的一种防水机器人关节,其特征在于:每个所述压持框(705)内部中空,每两个相邻的所述压持框(705)内部之间连接有连接插杆(7051),每个所述连接插杆(7051)均穿插设置在对应压持框(705)内部。
6.根据权利要求5所述的一种防水机器人关节,其特征在于:所述组件主板(701)的上方贯穿开设有螺纹孔(7032),所述螺纹孔(7032)内部与密封固定槽(7012)连通,所述螺纹孔(7032)内部螺纹设置有丝杆(7031),所述丝杆(7031)杆身下端与最上方的压持框(705)转动连接,所述丝杆(7031)杆身上端固定安装有旋钮(703),所述旋钮(703)下表面固定安装有密封环(7033),所述密封环(7033)与螺纹孔(7032)密封配合。
7.根据权利要求4所述的一种防水机器人关节,其特征在于:所述防护组件(8)包括有防护软罩(801),所述防护软罩(801)中部开设有组合孔(803),所述组合孔(803)内部设置有限位筒(802),所述限位筒(802)设置在驱动轴(503)外周。
8.根据权利要求7所述的一种防水机器人关节,其特征在于:所述防护软罩(801)两端均设置有密封边(8011),两端所述密封边(8011)分别插入至插入口(7011),所述防护软罩(801)两侧分别固定设置有扩展气囊(8012),所述防护软罩(801)两侧且靠近扩展气囊(8012)开设有卡和槽(8015),所述卡和槽(8015)与延伸环(702)密封连接。
9.根据权利要求8所述的一种防水机器人关节,其特征在于:所述扩展气囊(8012)内部设置有环形储气槽(8016),所述防护软罩(801)中部开设有若干主储气槽(8014),每个所述主储气槽(8014)与环形储气槽(8016)之间均贯穿开设有连接通道(8013),所述扩展气囊(8012)与异型槽(7021)内壁密封贴合。
10.根据权利要求9所述的一种防水机器人关节,其特征在于:所述组合孔(803)内壁开设有若干连接槽(804),每个所述连接槽(804)内部均活动设置有连接杆(8023),每个所述连接杆(8023)一端均与限位筒(802)连接,每个所述连接杆(8023)另一端均与连接槽(804)内壁连接有连接弹簧(8024);
技术总结
本发明提供一种防水机器人关节,涉及机器人关节技术领域,包括主关节和副关节,所述主关节一端通过传动箱与第一电机连接,所述主关节另一端设置有安装箱,所述安装箱内部设置有第二电机,所述副关节一端安装有连接座,所述连接座与第二电机连接且连接座与第二电机连接处设置有用于防水的防护组件。本申请当遇到压力时多个主储气槽受到挤压,随后将主储气槽内部的气体通过连接通道转移至环形储气槽中,从而实现扩展气囊的膨胀,并且扩展气囊会与异型槽内壁密封贴合,其中通过异型槽的多边设置,从而提高密封效果,进而使得本申请不仅可以对关节驱动部位进行保护的同时还可以根据压力大小实现自适应的密封强度调整。
技术研发人员:潘剑飞,王璨,李丽,洪岳,张宙
受保护的技术使用者:深圳大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!