一种基于自适应摩擦补偿的机械臂内模控制方法
本发明涉及机械臂系统控制领域,具体为一种基于自适应摩擦补偿的机械臂内模控制方法。
背景技术:
1、机械臂经过几十年的发展,不仅能精准高效地完成各种任务,而且还可以在一些恶劣环境中代替人类进行高风险重复性的工作,目前被广泛应用于焊接、装配、喷涂等工业场景中。同时,机械臂也是一个复杂的非线性系统,在实际应用中经常会受到参数不确定性、外部干扰和摩擦力的影响,这无疑会降低系统的控制精度,甚至会影响系统的稳定,因此在设计控制器时综合考虑参数不确定性、外部干扰和摩擦力的影响,从而实现对机械臂的高精度控制具有重要意义。
2、一方面,非线性输出调节理论在过去的几十年取得了很大进展,而其内模控制方法能够方便地解决系统的轨迹跟踪与干扰抑制问题,且具有良好的鲁棒性。另一方面,相比于其它摩擦力模型,stribeck摩擦力模型能较准确反应摩擦非线性特性,因此在本发明中被用来描述机械臂的关节摩擦力矩。将内模控制方法和自适应摩擦补偿方法结合应用到机械臂系统中,可以在系统参数未知的情况下补偿摩擦,抑制干扰,最终实现高精度的位置跟踪性能和速度跟踪性能。
技术实现思路
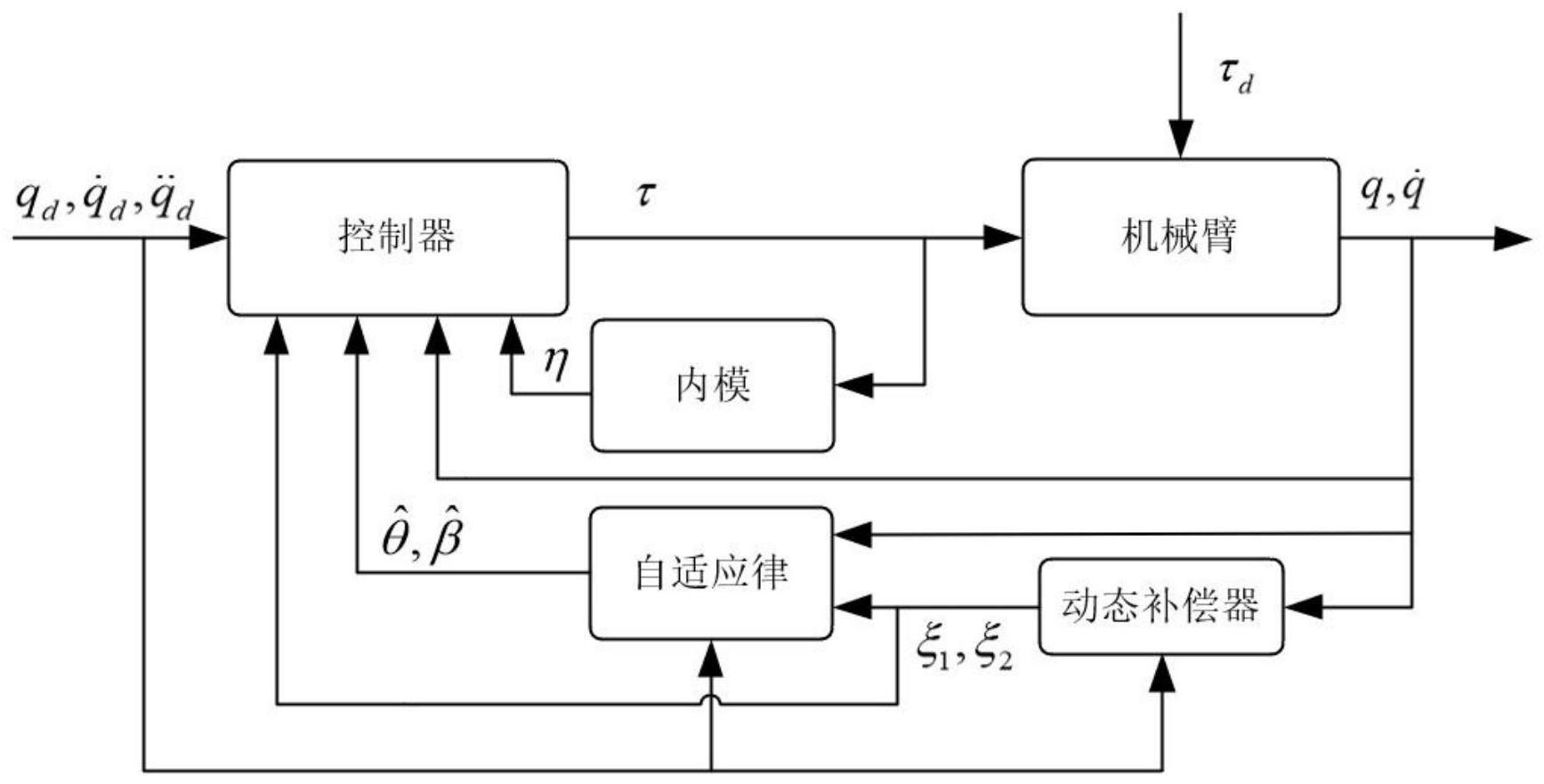
1、基于背景技术存在的技术问题,本发明提出了一种基于自适应摩擦补偿的机械臂内模控制方法。针对机械臂系统在实际运行中存在外部力矩扰动和摩擦力的情况,设计了基于自适应摩擦补偿的内模控制器,在允许系统参数未知的情况下实现了机械臂系统的干扰抑制和摩擦补偿,具有良好的位置跟踪性能和速度跟踪性能。
2、本发明采用的技术方案是:
3、一种基于自适应摩擦补偿的机械臂内模控制方法,其特征在于,包括以下步骤:
4、步骤1:建立n自由度机械臂系统的动力学模型;
5、步骤2:设计内模,将机械臂系统的位置跟踪和干扰抑制问题转化为由该系统和内模组成的增广系统的镇定问题;
6、步骤3:设计最终控制器,对摩擦力进行补偿并解决增广系统的镇定问题。
7、步骤1中,建立n自由度机械臂系统的动力学模型,其过程如下:
8、1.1,根据欧拉—拉格朗日方法建立n自由度机械臂系统的动力学模型如下:
9、
10、其中分别为机械臂的关节位置和速度向量,为正定对称的惯性矩阵,为向心力和科里奥利力矩,为重力矩,为输入力矩,为摩擦力矩,为外界扰动。上述机械臂系统具有以下性质:
11、性质1:矩阵和满足以下条件:
12、
13、性质2:机械臂模型可进行下列参数线性化变换:
14、
15、其中e(q,x),均为已知矩阵,满足为机械臂中不确定参数。
16、1.2,假设机械臂关节位置期望值为qd,且qd,均为连续有界信号,外部力矩干扰τd(t)=[τd1(t),…,τdn(t)]t为有限个阶跃信号和正弦信号的组合,形式如下:
17、
18、其中ai0为常数,ki为正弦信号的个数,aij,ωij,φij分别为正弦信号的幅值,频率和相位。
19、1.3,定义跟踪误差e=q-qd和其中α为一个正常数,进一步可得取则有:
20、
21、1.4,系统(1)可以写为如下形式:
22、
23、结合性质2,(6)式可以进一步写为:
24、
25、1.5,引入stribeck摩擦力模型对机械臂关节摩擦力矩进行描述,第i关节的摩擦力矩形式如下:
26、
27、其中对于i=1,…,n,fci为库伦摩擦系数,fsi为静摩擦系数,fvi为黏性摩擦系数,为stribeck速度,δ为经验参数。
28、定义
29、
30、则机械臂摩擦力可表示为其中为已知矩阵,β为未知参数向量。
31、步骤2中,设计内模,将机械臂系统的位置跟踪和干扰抑制问题转化为由该系统和内模组成的增广系统的镇定问题,其过程如下:
32、2.1,对τdi(t),i=1,…,n进行微分,可得:
33、
34、其中均为实数,si为正常数。
35、2.2,令则有:
36、
37、其中
38、2.3,选择一对可控矩阵(mi,ni),其中为hurwitz矩阵,则存在一个非奇异矩阵ti满足以下sylvester方程:
39、
40、2.4,定义如下记号:
41、
42、令ρ=-tυ,ψ=γt-1,根据公式(11),可得:
43、
44、τd=-ψρ (15)
45、2.5,设计内模为如下形式:
46、
47、2.6,进行如下坐标变换:
48、
49、根据性质2,得到如下误差方程:
50、
51、其中
52、2.7,设计如下动态补偿器:
53、
54、2.8,令可得:
55、
56、则(7)式可以写为如下形式:
57、
58、其中
59、此时,机械臂系统的位置跟踪和干扰抑制问题被转化为由该系统和内模组成的增广系统的镇定问题。
60、步骤3中,设计最终控制器,对摩擦力进行补偿并解决增广系统的镇定问题。
61、3.1,设计系统的状态反馈控制律为如下形式:
62、
63、其中k为正定对角常数矩阵,为θ的估计值,为β的估计值。
64、3.2,取李雅普诺夫方程:
65、
66、其中δ1为一个正定矩阵满足mtδ1+δ1m=-i,i为单位矩阵,κ,λ为正常数,λ1,λ2为任意的正定对角常数矩阵,则有:
67、
68、3.3,由于θ,β为未知常量,选择自适应律为:
69、
70、此时,公式(24)可以化简为如下形式:
71、
72、设计ψ为有界对角矩阵,存在正常数a1,b1满足选择合适的κ和k,使得κ>b1,(k-a1in)为正定矩阵,则式(26)可写为:
73、
74、其中a0为矩阵(k-a1in)的最小特征值,b0=κ-b1。经过稳定性分析可知,在所提出控制器的作用下,当t→∞时,闭环系统状态有界。对公式(27)两边对时间积分后可知:根据barbalat引理可知则位置跟踪误差e和速度跟踪误差最终可以收敛到零。
75、3.4,则基于李雅普诺夫方法,可设计最终控制器如下:
76、
77、本发明的优点是:
78、本发明提出的一种基于自适应摩擦补偿的机械臂内模控制方法,针对机械臂系统在实际运行中所存在的外部力矩扰动和摩擦力的情况,设计了基于自适应摩擦补偿的内模控制器,在允许系统参数未知的情况下,可以对机械臂系统进行干扰抑制和摩擦补偿,从而实现对机械臂关节的高精度位置跟踪控制和速度跟踪控制。
- 还没有人留言评论。精彩留言会获得点赞!