一种喷涂机器人天花板喷涂作业行进路径点的检测方法与流程
本发明涉及喷涂机器人,尤其涉及一种喷涂机器人天花板喷涂作业行进路径点的检测方法。
背景技术:
1、在喷涂机器人的应用中,喷涂机器人的作业路径规划决定着喷涂作业能否以智能化自动控制进行,而由于建筑物室内环境错综复杂,因此在对天花板的边角区域喷涂时,对于该区域所对应的行进路径点容易出现两种以下状况:
2、一是喷涂机器人根据户型图所生成的行进路径点容易出现穿墙而过的现象,即所计算得出的行进路径点位于室外,导致喷涂机器人无法行进至指定位置进行作业;
3、二是所生成的行进路径点容易出现离墙过近的现象,导致喷涂机器人的机械臂无法伸展而开。
4、这两种现象都会导致所生成的行进路径点出现错误,导致喷涂机器人行进至该作业路径点时,存在无法行进至指定位置以及离墙过近的问题,而目前对于喷涂机器人行进路径点的规划缺少相应的检测机制,无法对生成的行进路径点的准确性进行检测,从而造成喷涂机器人在执行喷涂作业时出现误区,并且无法连续性的对室内天花板进行喷涂。
技术实现思路
1、针对现有技术的不足,本发明提供了一种喷涂机器人天花板喷涂作业行进路径点的检测方法,解决了现有技术无法针对行进路径点是否在室内以及离墙过近进行检测的技术问题。
2、为解决上述技术问题,本发明提供了如下技术方案:一种喷涂机器人天花板喷涂作业行进路径点的检测方法,包括以下步骤:
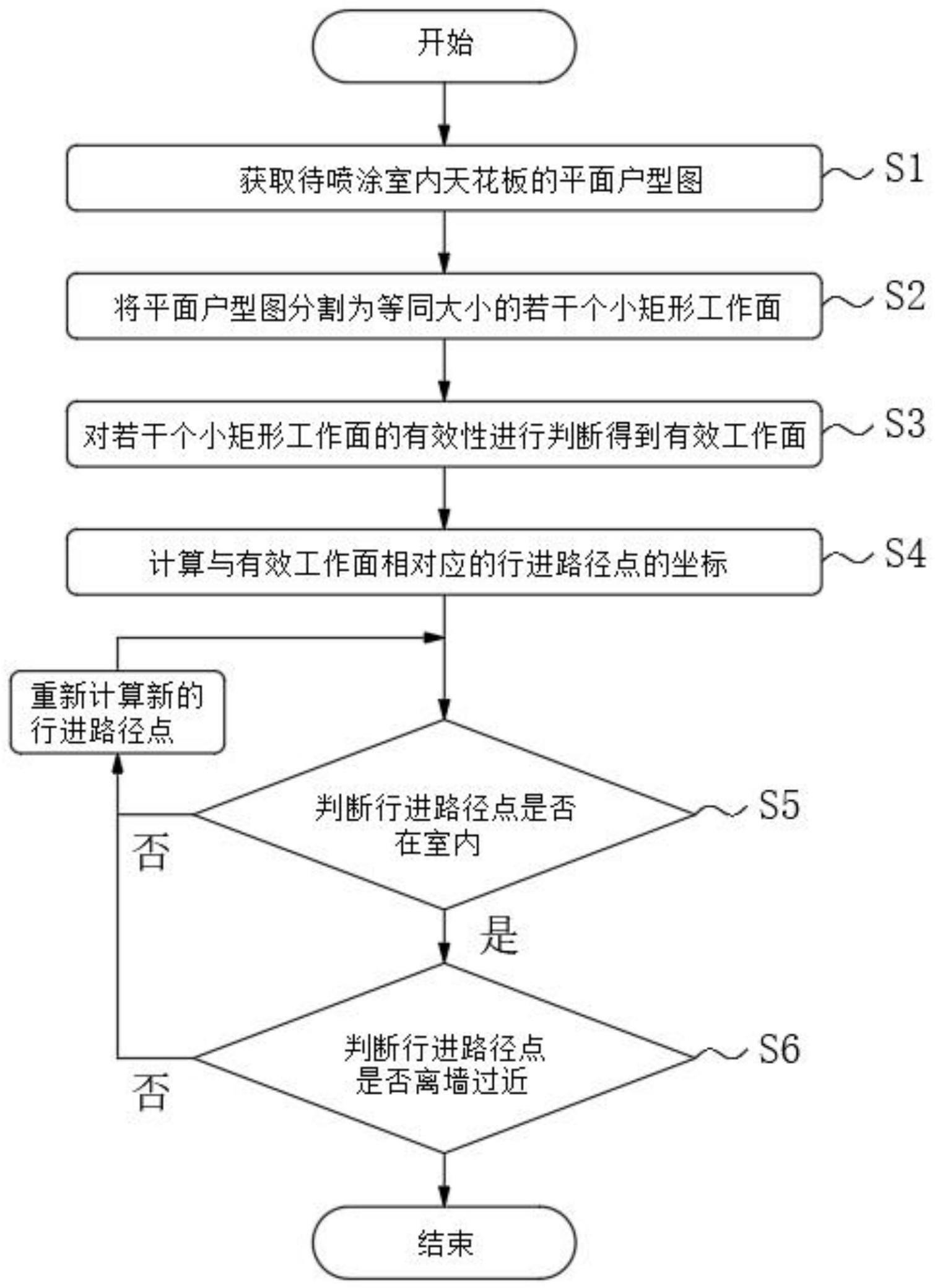
3、s1、获取待喷涂室内天花板的平面户型图;
4、s2、将平面户型图分割为等同大小的若干个小矩形工作面;
5、s3、对若干个小矩形工作面的有效性进行判断得到有效工作面;
6、s4、计算与有效工作面相对应的行进路径点的坐标;
7、s5、判断行进路径点是否在室内;
8、若是,则进入步骤s6;
9、若否,则重新计算与有效工作面相对应的新的行进路径点,随后返回步骤s5;
10、s6、判断行进路径点是否离墙过近;
11、若是,则重新计算与有效工作面相对应的新的行进路径点,随后返回步骤s5;
12、若否,则结束。
13、进一步地,在步骤s2中,将平面户型图分割为等同大小的若干个小矩形工作面,具体过程包括以下步骤:
14、s21、选择一个矩形awbwcwdw覆盖整个平面户型图,令aw点的坐标为(xmin,ymin),bw点的坐标为(xmax,ymin),cw点的坐标为(xmax,ymax),dw点的坐标为(xmin,ymax),以长为ls、宽为ws将矩形awbwcwdw分割为若干个小矩形工作面;
15、s22、判断每一个小矩形工作面是否为完整工作面;
16、若是,则结束;
17、若否,则进入步骤s23;
18、s23、将不完整工作面补全为完整工作面。
19、进一步地,在步骤s22中,判断每一个小矩形工作面是否为完整工作面,具体过程包括以下步骤:
20、s221、获取小矩形工作面p与墙体所构成拐点的类别,类别分为阳角拐点和阴角拐点;
21、s222、设小矩形工作面p顶点中最小横坐标为xs min,最大横坐标为xs max,最小纵坐标为ys min,最大纵坐标为ys max;
22、s223、判断小矩形工作面p是否不具备完整性;
23、若小矩形工作面p中存在一拐点g(xg,yg),使得xs min<xg<xs max且ys min<yg<ys max,则小矩形工作面p不具备完整性;
24、s224、判断小矩形工作面p为不完整且规则工作面或不完整且不规则工作面。
25、进一步地,在步骤s224中,判断小矩形工作面p为不完整且规则工作面或不完整且不规则工作面,具体过程包括以下步骤:
26、s2241、令拐点g的下一拐点的坐标为g1(xg1,yg1),拐点g的上一拐点的坐标为g0(xg0,yg0);
27、s2242、分别计算拐点g0和g之间的向量以及g和g1之间的向量
28、s2243、根据向量以及向量判断小矩形工作面p是否为不完整且规则工作面;
29、若拐点g为阴角的拐点,且小矩形工作面p内只含有拐点g,则,小矩形工作面p为不完整且规则工作面;
30、若拐点g为阳角的拐点,无论拐点g的下一拐点是否在小矩形工作面p内,则,小矩形工作面p都为需要进行分割的不完整且不规则工作面;
31、若存在两相邻拐点g’(xg’,yg’)和g”(xg”,yg”),使得线段g’g”与小矩形工作面p的边有两个交点,即当ys min<yg’<ys max且ys min<yg”<ys max时,xg’≤xs min或xg’≥xs max且xg”≥xs max或xg”≤xs max;
32、或当xs min<xg’<xs max且xs min<xg”<xs max时,yg’≤ys min或yg’≥ys max且yg”≥ys max或yg”≤ys max,则,小矩形工作面p不具备完整性,为不完整且规则工作面。
33、进一步地,在步骤s3中,对若干个小矩形工作面的有效性进行判断得到有效工作面,具体过程包括以下步骤:
34、s31、令面户型图中边界线段l的起点为lst(xst,yst)、终点为led(xed,yed),小矩形工作面左下角顶点a1的坐标为(xa1,ya1),右下角顶点b1的坐标为(xb1,yb1),右上角顶点c1的坐标为(xc1,yc1),左上角d1的顶点坐标为(xd1,yd1);
35、s32、设线段a1c1所在直线方程为y1=k1x1+b1,线段b1d1所在直线方程为y2=k2x2+b2;
36、s33、当k1≠k2时,联立直线方程k1和k2得到交点即为质心点m;
37、s34、从质心点m水平向右引出一射线p,并按照yst≤ym<yed或yed≤ym<yst筛选出满足条件的边界线段l,则边界线段l满足yst≠yed;
38、s35、设边界线段l所在的直线方程为x=kly+bl;
39、s36、将ym代入直线方程x=kly+bl,判断质心点m是否位于边界线段l的左侧;
40、若xm<kl*ym+bl,则质心点m位于边界线段l的左侧;
41、若否,则质心点m位于边界线段l的右侧;
42、s37、依次往复计算出交点的总个数;
43、若交点的总个数为奇数,则质心点m所对应小矩形工作面为有效工作面;
44、若交点的总个数为偶数,则质心点m所对应小矩形工作面为无效工作面。
45、进一步地,在步骤s4中,计算与有效工作面相对应的行进路径点的坐标,具体过程包括以下步骤:
46、s41、令完整工作面abcd左下角顶点a的坐标为(xa,ya),右下角顶点b的坐标为(xb,yb),右上角顶点c的坐标为(xc,yc),左上角d的顶点坐标为(xd,yd),行进路径点p的坐标为(xp,yp);
47、s42、在线段ab取一点e,令|ae|=dright,dright为喷涂机器人天花板喷涂作业时x方向的最大偏差,|pe|=dside,dside为喷涂机器人天花板喷涂作业时距离工作面长边ab的距离;
48、s43、根据顶点a和顶点b之间的单位向量计算点e的坐标;
49、s44、根据点e的坐标计算得到行进路径点p的坐标:
50、s45、计算喷涂机器人在行进路径点p作业的姿态θp。
51、进一步地,在步骤s5中,判断行进路径点是否在室内,具体过程包括以下步骤:
52、s51、令完整工作面a1b1c1d1左下角顶点a1的坐标为右下角顶点b1的坐标为右上角顶点c1的坐标为左上角顶点d1的坐标为行进路径点p1的坐标为新的行进路径点p’1的坐标为边界线段l的起点为lst(xst,yst)、终点为led(xed,yed);
53、s52、按照或筛选出满足条件的边界线段l,可知边界线段l满足yst≠yed;
54、s53、设边界线段l所在的直线方程为x=kly+bl,kl=(yed-yst)/(xed-xst),bl=yst-kl*xst;
55、若则边界线段l与从行进路径点p1引出的射线有交点;
56、s54、依次往复计算,得到满足条件的边界线段l总的总个数;
57、若边界线段l总的总个数为偶数,则行进路径点p1在室外;
58、若边界线段l总的总个数为奇数,则行进路径点p1在室内;
59、s55、对在室外的行进路径点p1重新计算得到新的行进路径点p’1。
60、进一步地,在步骤s6中,判断行进路径点是否离墙过近,具体过程包括以下步骤:
61、s61、令完整工作面a2b2c2d2左下角顶点a2的坐标为右下角顶点b2的坐标为右上角顶点c2的坐标为左上角顶点d2的坐标为行进路径点p2的坐标为行进路径点p’2的坐标为点s的坐标为(xs,ys),点t的坐标为(xt,yt);
62、s62、设线段st所在直线方程为:astx+bstx+cst=0,计算行进路径点p2到线段st所在直线垂线的垂足h的坐标(xh,yh);
63、s63、分别计算行进路径点p2到线段st所在直线的距离dpst、行进路径点p2到线段st端点s的距离dps、行进路径点p2到线段st端点t的距离dpt、垂足h到线段st端点s的距离dhs、垂足h到线段st端点t的距离dht以及线段st端点s到线段st端点t的距离dst;
64、s64、从距离dps、距离dpt和距离dpst中选取对比值与墙阈值swall对比判断行进路径点p2是否离墙过近;
65、若dht+dhs>dst,则选取dps和dpt中小的值作为对比值,若dht+dhs=dst,则选取dpst作为对比值;
66、若对比值小于离墙阈值swall,则行进路径点p2离墙过近;
67、若对比值小于离墙阈值swall,则相反;
68、s65、对在室外的行进路径点p2重新计算得到新的行进路径点p’2。
69、借由上述技术方案,本发明提供了一种喷涂机器人天花板喷涂作业行进路径点的检测方法,至少具备以下有益效果:
70、1、本发明解决了现有技术无法针对行进路径点是否在室内以及离墙过近进行检测的技术问题,能够对喷涂机器人在对室内天花板喷涂作业所生成的行进路径点的准确性进行检测,避免喷涂机器人无法行进至指定位置以及离墙过近的现象,从而提高了喷涂机器人在对室内天花板执行喷涂作业的质量以及效率。
71、2、本发明能够对分割为小矩形工作面的有效性进行判断,避免出现小矩形工作面完全在平面户型图之外的情况,同时为后续的行进路径点是否在室内以及离墙过近状况检测提供保障,从而保证被分割的小矩形工作面在计算与其相对应的行进路径点的准确性。
- 还没有人留言评论。精彩留言会获得点赞!