腰髋集成助力电机的搬运外骨骼机器人及其控制方法
本发明属于外骨骼机器人领域,具体涉及一种腰髋集成助力电机的搬运外骨骼机器人及其控制方法。
背景技术:
1、随着科学技术的发展,目前工业生产过程中从零件加工,到大型零件组装已基本实现自动化,同时在流水线生产中重型货物的搬运工作基本由机械设备所代替,但在特殊环境下依靠人力进行重物搬运依然是最可靠的方式之一。搬运外骨骼机器人是一种能够穿戴在操作者身上、并与其上肢,腿部相连接、能够根据操作者的意图进行协同运动和辅助做功的机器人机构。人体搬运动作为髋关节与腰椎协同运动,而搬运过程还包括持重行走,传统的搬运外骨骼将髋关节与腰部简化为一个关节,而人体搬运起身姿势各异,多为髋关节与腰部的组合运动,将人体五连杆模型简化为四连杆,使得相对运动转角减小的同时忽略了搬运过程中实际运动状态,使得助力效果降低,舒适性下降忽略不同人体搬运习惯,因此单一的髋关节助力或腰部助力方式难以适用,不能很好地做到人机协同运动,人机运动时容易发生干涉,而人体上肢在搬运过程中也需要承担一部分拉力,在上肢重心过高,有源助力方式常常具有较高的质量,在助力的同时其本身通常也会为人体造成负担,同时人体复杂上肢关节非常灵活,冗余自由度较多,能够完成多种复杂的运动,而外骨骼肩关节自由部过多的情况下对人体搬运助力效果较差。
2、在专利号为cn115070734a的发明专利中,公开了一种上肢外骨骼机器人,其采用线驱动,省去了腰部助力关节,采用线驱动的方式控制较难,人机协同性较差,在获得助力的同时下蹲过程中人体需要克服阻力,助力效果不高。
3、在专利号cn106493714b的发明专利中,公开了一种外骨骼搬运助力机器人,该发明在髋关节以及肩部采用有源驱动方式,但腰部运动被限制,同时肩关节仅保留前屈后伸自由度使得穿戴者的舒适度有所降低,且人机协同运动难以保证。
技术实现思路
1、本发明的目的在于提供一种腰髋集成助力电机的搬运外骨骼机器人及控制方法,解决了现有搬运外骨骼不能很好的匹配人体搬运过程中腰部与髋关节运动匹配的问题。
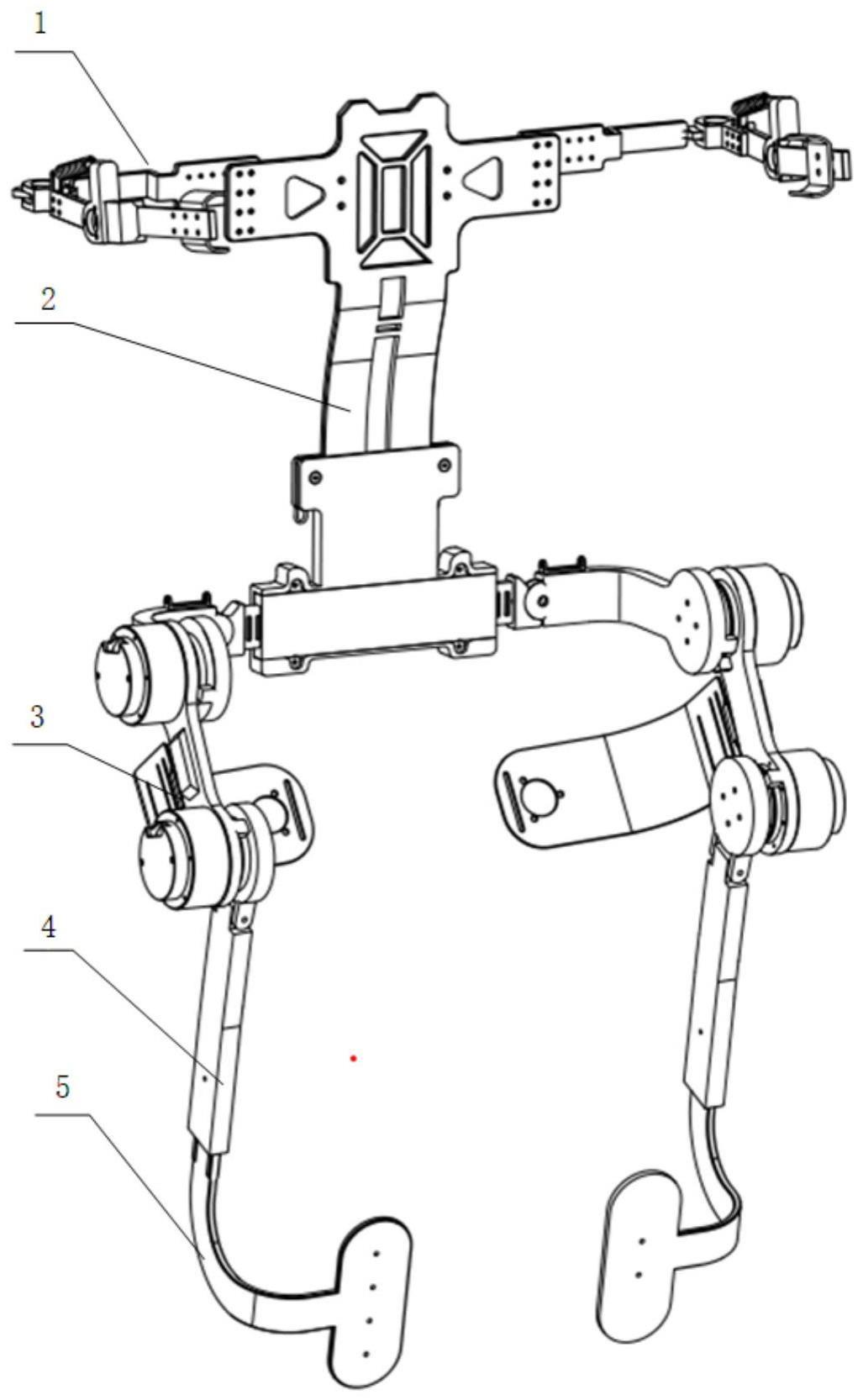
2、实现本发明目的的技术解决方案为:一种腰髋集成助力电机的搬运外骨骼机器人,包括背架机构和对称设置在背架机构上端两侧的两组无源上肢助力机构,对称设置在背架机构下端两侧的两组双电机腰髋助力机构以及和双电机腰髋助力机构连接的腿杆;
3、所述双电机腰髋助力机构包括呈l型设置的腰部连接杆,第一扭矩传感器,第一连接法兰,电机连杆,第一电机,第二电机,第二连接法兰,第二扭矩传感器和髋关节连接杆;
4、所述第一电机和第二电机均设置在电机连杆上,第一电机通过第一连接法兰和第一扭矩传感器和腰部连接杆的l型的一端连接,腰部连接杆l型的另一端和背架机构连接;所述第二电机通过第二连接法兰和第二扭矩传感器和髋关节连接杆连接,髋关节连接杆另一端和腿杆连接。
5、进一步的,所述背架机构具有适应不同人体的上下调节功能和腰部宽度调节功能。
6、进一步的,背架机构包括呈类t型的背板,压紧旋钮,背板套,拉杆,按钮,卡爪,扭簧和长度调节壳;
7、背板套上设有与背板适配的空心槽,通过压紧旋钮实现背板在背板套内上下位置的可调,从而实现背架机构上下调节;
8、背板套下端设置在长度调节壳上,长度调节壳内部两侧均设有拉杆,拉杆外端分别和腰部连接杆连接,拉杆上均匀的设有多个与卡爪配合的条形凹槽;
9、所述卡爪呈十字型,卡爪上下方向的两端设有与长度调节壳转动连接的转轴,转轴上套有扭簧,卡爪水平方向的其中一个翅上设有与拉杆上的条形凹槽配合的凸起,相对的另一个翅的外部配设按钮内部预留卡爪翅向内转动的空间;
10、通过按钮解除卡爪与条形凹槽的卡合,实现拉杆相对于长度调节壳位置的可调,松开按钮在扭簧的作用下卡爪复位从而实现对拉杆的卡合;
11、背板上方与人体背部接触,背板下方呈外凸的弧形,最大凸出处向外凸出六厘米,为人体弯腰提供预留量。
12、进一步的,无源上肢助力机构包括背部连杆,内旋连杆,屈伸第一连杆和拉簧,屈伸第二连杆;
13、背部连杆与背架连接的一端设有多列螺纹孔,通过不同螺纹孔和背架的连接实现两个无源上肢助力机构之间的距离的可调,所述背部连杆另一端和内旋连杆通过轴承连接,且通过轴承实现肩部的旋内/旋外,内旋连杆另一端和屈伸第一连杆的一端通过螺栓连接,屈伸第一连杆的另一端通过轴承和屈伸第二连杆连接,且通过轴承实现肩部的前屈/后伸;
14、屈伸第二连杆设有上部凸起,屈伸第一连杆与内旋连杆连接的一端设有上部凸起,拉簧设置在屈伸第二连杆的上部凸起和屈伸第一连杆的上部凸起之间。
15、进一步的,背部连杆末端即与内旋连杆连接端存在限位块,限位块外部开口角度为135度,使得人体肩部旋内/旋外角度在0—225度内;
16、屈伸第二连杆通过螺栓连接大臂绑缚。
17、进一步的,第一电机外圈通过螺钉与电机连杆连接,第一电机内圈通过螺钉与第一连接法兰外圈连接,第一扭矩传感器内圈通过螺钉与第一连接法兰内圈连接,第一扭矩传感器外圈与腰部连接杆连接;
18、腰部连接杆与电机连杆上置有限位块,使得电机连杆在腰部摆动范围为0—88度,腰部连接杆通过螺栓与拉杆连接,第一绑缚连接块通过螺钉固定在腰部连接杆上,用于固定腰部绑缚。
19、进一步的,第二电机通过螺钉外圈与电机连杆连接,第二电机内圈通过螺钉与第二连接法兰外圈连接,第二扭矩传感器内圈通过螺钉与第二连接法兰内圈连接,第二连接法兰外圈与髋关节连接杆连接,第一扭矩传感器外圈与腰部连接杆连接,髋关节连接杆与电机连杆上均设置有限位块,髋关节连接杆在腰部摆动范围为0—155度,第二绑缚连接块通过螺钉固定在电机连杆上用于连接臀部绑缚。
20、进一步的,第一电机和第二电机内置关节角度传感器。
21、一种上述的搬运外骨骼机器人的控制方法,其特征在于,包括如下步骤:
22、步骤(1):穿戴者穿戴好外骨骼后,手部佩戴压力传感器后保持静止状态,进行初始信息采集与标定;
23、步骤(2):穿戴者开始运动时,通过电机内置的关节角度传感器、第一扭矩传感器、第二扭矩传感器和手部的压力传感器采集人体运动时的信息;
24、步骤(3):控制器根据步骤(2)腰部电机的关节角度传感器采集的数据,判断外骨骼运动助力状态;
25、步骤(4):控制器根据步骤(2)手部的压力传感器采集的数据、步骤(3)判断得到的助力状态,根据控制律计算外骨骼实际输出力矩;
26、步骤(5):根据步骤(4)计算得到的实际输出力矩,控制器控制底层伺服系统驱动相应的电机实现外骨骼系统的运动;
27、步骤(6):实时测量外骨骼的运动学信息,监测底层伺服系统输出是否正确,将其作为反馈输入到控制器中,并通过阻抗控制不断缩小实际运动力矩与实际输出力矩的差值,使得外骨骼以实际输出力矩运动到指定位置完成对外骨骼运动的闭环控制。
28、进一步的,步骤(4)的计算基于阻抗模型,具体为:
29、控制律规律依据下式:
30、
31、
32、式中τe和τh分别表示外骨骼的驱动力矩和重物的搬运力矩,q为下肢外骨骼关节实际输出的转角;qd、是下肢外骨骼理想驱动的关节角度、角速度和角加速度;δq、为经过阻抗控制环得到的关节转角、角速度、角加速度的修正值;为经过阻抗控制后得到修正后的位置输入;kp和kd为比例和微分反馈矩阵;d为干扰项;τf为实际扭矩与希望扭矩之差;kd为刚度矩阵,m表示惯性矩阵,c代表向心力和科氏力扭矩,g为重力向量;
33、联立式(1-1)和(1-2)得:
34、
35、其中结合阻抗控制进行设计,抑制系统不确定性的影响,提高轨迹跟踪精度;δm(q),δg(q),τf,d的值均为0,符合阻抗控制的关系式阻抗控制的关系式:
36、
37、其中f=fd-fe,fd、fe分别表示设置的期望人机交互力和实际的人机交互力,在实际的控制过程中fd设置为常数
38、本发明与现有技术相比,其显著优点在于:
39、(1)本发明腰部调节机构与腰胯双助力电机机构连接,其中腰部电机为上肢与腰部的相对转动提供助力,髋部电机为腰部与大腿在髋关节产生的相对转动提供助力,采用腰髋双助力电机,更好的适应不同人体的运动习惯以及搬运动作的特性,为在搬运髋关节与腰部相对人体产生的相对运动提供助力。
40、(2)本发明腿杆与绑带机构在加工与安装过程中与竖直状态存在一定倾斜,更符合人体腿部特征。
41、(3)本发明在采用可调背板实现无源上肢助力机构高度可调的同时,按压放置在卡爪上方的按钮实现卡爪的旋转,实现拉杆抽拉,以适应不同人体腰部宽度,在背部连杆及绑带机构上置成排螺纹孔,实现无源上肢助力机构宽度及腿部连杆长度可调,进一步提高了人体穿戴的舒适性。
42、(4)本发明同时为改善运动过程中背板与人体运动干涉的问题,采用弯曲型背板,各关节都设置有关节限位装置,具有关节保护功能,使用时安全可靠,避免对人体关节造成伤害。
- 还没有人留言评论。精彩留言会获得点赞!