一种基于机器人抓取控制系统及其直流电机柔顺控制方法
本发明属于自动控制,具体地,涉及一种基于机器人抓取控制系统及其直流电机柔顺控制方法。
背景技术:
1、在机器人抓取控制系统中,为实现不同物件的抓取,需要控制机器人夹爪的夹取力,以避免因为抓取力过大而导致被抓取物件的损伤。
2、现有技术中,通常在夹爪系统中安装力传感器,检测实际的夹取力,以实现夹取力的控制。如申请号:cn201910942571.x公开了一种柔顺夹持器的自适应抓取方法及其抓取系统,通过将夹持力传感器设置在柔顺夹持器上,并与微处理器信号连接,实现对夹取力精确控制。但是,安装力传感器不仅会增加成本,同时会增加系统结构设计、控制系统等的复杂程度,此外机器人夹爪通常安装在机器人的末端,增加了机器人末端夹爪装置的重量。
技术实现思路
1、针对现有技术中存在的问题,本发明提供了一种基于机器人抓取控制系统及其直流电机柔顺控制方法,无需安装力传感器,简化了机器人夹取控制系统的结构设计和夹爪的重量
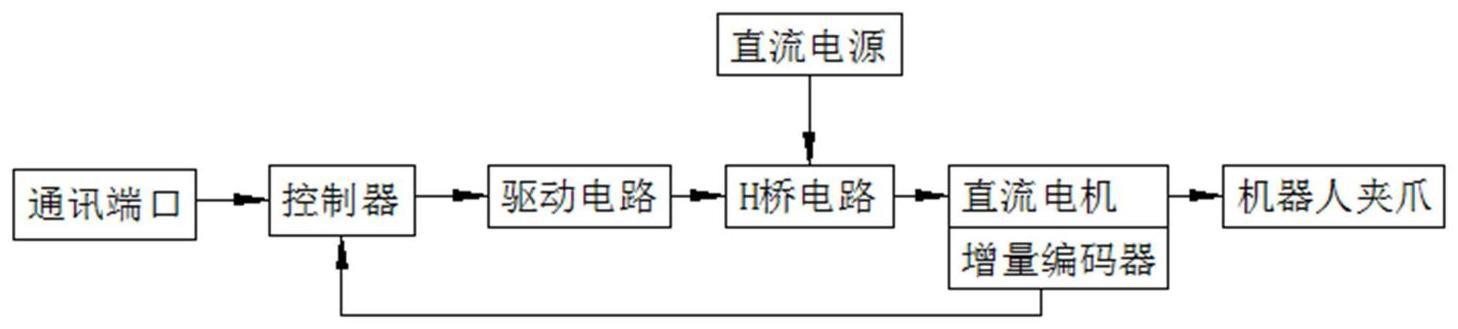
2、为实现上述技术目的,本发明所采取的技术方案是:一种基于机器人抓取控制系统,包括依次连接的通讯端口、控制器、驱动电路、h桥电路、直流电机及机器人夹爪,所述h桥电路通过直流电源提供电源,所述直流电机上设有增量编码器,用于检测直流电机的运行速度,实现直流电机的速度闭环控制;所述通讯端口用于控制器接收来自上位机的指令;所述控制器用于控制直流电机,输出脉宽调制信号到驱动电路;所述驱动电路用于驱动h桥电路;所述h桥电路用于实现对直流电机的控制;所述机器人夹爪为二指夹爪,由直流电机通过蜗轮蜗杆驱动二指夹爪进行夹持或松开动作。
3、进一步地,所述控制器包括速度控制器、柔顺控制器、脉宽调制器和转速计算器,所述转速计算器用于计算直流电机的实际速度;所述速度控制器用于接收直流电机设定速度和实际速度之间的速度偏差,实现直流电机的速度闭环控制;所述柔顺控制器接收速度控制的输出,并将柔顺控制器的输出传输到脉宽调制器;所述脉宽调制器信号传输到驱动电路,所述脉宽调制器、驱动电路、h桥电路共同组成直流电机电压放大模块。
4、进一步地,所述柔顺控制器在机器人夹爪夹取到物体前,对接收到的速度控制输出不作任何处理,直接传输到脉宽调制器,实现对直流电机速度的闭环控制;所述柔顺控制器在机器人夹爪夹取到物体时,输出与待夹取物体所需的夹紧力相关的固定电压对直流电机进行控制。
5、进一步地,本发明还提供了一种所述的基于机器人抓取控制系统的直流电机柔顺控制方法,具体包括如下步骤:
6、步骤s1、设置驱动机器人夹爪的直流电机速度为设定速度,并采用速度闭环控制直流电机的运行速度;
7、步骤s2、通过比较直流电机的额度速度与直流电机的实际速度,直至直流电机的实际速度与设定速度的偏差小于第一阈值,此时,理论上直流电机的实际速度达到设定速度;
8、步骤s3、继续比较直流电机的额度速度与直流电机的实际速度,当实际速度与设定速度的偏差大于第二阈值时,判定机器人夹爪已经接触到待抓取物体,直流电机开始减速;
9、步骤s4、机器人夹爪已经接触到待抓取物体后,通过柔顺控制器的输出电压来保持机器人夹爪的抓紧力,直流电机堵转,机器人夹爪夹紧物体。
10、进一步地,所述第一阈值的取值为设定速度的2%。
11、进一步地,所述第二阈值的取值为设定速度的5%。
12、进一步地,步骤s3中所述柔顺控制器的输出电压输出固定电压u2,u2的计算过程为:
13、
14、其中,i为待抓取物体需要的夹取力对应直流电机电流,r为直流电机的内阻,ka为h桥电路电压功率放大倍数。
15、与现有技术相比,本发明具有如下有益效果:
16、(1)本发明基于机器人抓取控制系统及其直流电机柔顺控制方法无需安装力传感器,简化了机器人夹爪系统的结构设计和夹爪的重量;
17、(2)利用机器人夹爪夹紧力与直流电机的输出力矩的确定关系及直流电机输出力矩与电流成线性关系的特点,通过控制直流电机的电流实现对夹爪夹紧力的控制,简化机器人夹爪控制;
18、(3)机器人夹爪在夹紧物体时,直流电机处于堵转状态,此时电机电流近似仅与电机阻抗相关,此时电机电流与电机电枢两端电压成线性关系,在常规直流电机控制结构的速度控制和脉宽调制器之间增加柔顺控制器环节,无需安装电机电流传感器和设计电机电流控制回路,在夹取物体时进行电机的电压控制,进而控制电机力矩,实现夹紧力的控制,简化了控制系统及控制方法。
技术特征:
1.一种基于机器人抓取控制系统,其特征在于,包括依次连接的通讯端口、控制器、驱动电路、h桥电路、直流电机及机器人夹爪,所述h桥电路通过直流电源提供电源,所述直流电机上设有增量编码器,用于检测直流电机的运行速度,实现直流电机的速度闭环控制;所述通讯端口用于控制器接收来自上位机的指令;所述控制器用于控制直流电机,输出脉宽调制信号到驱动电路;所述驱动电路用于驱动h桥电路;所述h桥电路用于实现对直流电机的控制;所述机器人夹爪为二指夹爪,由直流电机通过蜗轮蜗杆驱动二指夹爪进行夹持或松开动作。
2.根据权利要求1所述的一种基于机器人抓取控制系统,其特征在于,所述控制器包括速度控制器、柔顺控制器、脉宽调制器和转速计算器,所述转速计算器用于计算直流电机的实际速度;所述速度控制器用于接收直流电机设定速度和实际速度之间的速度偏差,实现直流电机的速度闭环控制;所述柔顺控制器接收速度控制的输出,并将柔顺控制器的输出传输到脉宽调制器;所述脉宽调制器信号传输到驱动电路,所述脉宽调制器、驱动电路、h桥电路共同组成直流电机电压放大模块。
3.根据权利要求2所述的一种基于机器人抓取控制系统,其特征在于,所述柔顺控制器在机器人夹爪夹取到物体前,对接收到的速度控制输出不作任何处理,直接传输到脉宽调制器,实现对直流电机速度的闭环控制;所述柔顺控制器在机器人夹爪夹取到物体时,输出与待夹取物体所需的夹紧力相关的固定电压对直流电机进行控制。
4.一种权利要求1所述的基于机器人抓取控制系统的直流电机柔顺控制方法,其特征在于,具体包括如下步骤:
5.根据权利要求4所述的基于机器人抓取控制系统的直流电机柔顺控制方法,其特征在于,所述第一阈值的取值为设定速度的2%。
6.根据权利要求4所述的基于机器人抓取控制系统的直流电机柔顺控制方法,其特征在于,所述第二阈值的取值为设定速度的5%。
7.根据权利要求4所述的基于机器人抓取控制系统的直流电机柔顺控制方法,其特征在于,步骤s3中所述柔顺控制器的输出电压输出固定电压u2,2的计算过程为:
技术总结
本发明公开了一种基于机器人抓取控制系统及其直流电机柔顺控制方法,包括依次连接的通讯端口、控制器、驱动电路、H桥电路、直流电机及机器人夹爪,H桥电路通过直流电源提供电源,直流电机上设有增量编码器,用于检测直流电机的运行速度,实现直流电机的速度闭环控制;通讯端口用于控制器接收来自上位机的指令;控制器用于控制直流电机,输出脉宽调制信号到驱动电路;驱动电路用于驱动H桥电路;H桥电路用于实现对直流电机的控制;机器人夹爪为二指夹爪。本发明在没有安装力传感器及电机电流传感器的情况下,通过电机在柔顺控制时夹取物品堵转的电机电压,进而实现电机稳态时的电流控制,进一步实现夹爪的夹取力控制。
技术研发人员:万其,林心怡,张可凡,刁慧,马俊哲,曹飞虎,徐衍丰,倪浩,刘汉忠,陈桂
受保护的技术使用者:南京工程学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!