一种开关设备巡检操作机器人及其控制方法和设备与流程
本申请涉及变电站操作控制,尤其涉及一种开关设备巡检操作机器人及其控制方法和设备。
背景技术:
1、变电站操作控制的机器人是一种运用于变电站的智能操作机器人,该机器人目的就是通过让工作人员无需到达现场,只需在后台根据操作要求并通过集中控制平台下发操作指令,等待机器人反馈执行结果即可,而当开关设备发生紧急情况时,机器人便会根据指令运行到故障变电站柜体完成紧急分闸解锁及操作动作,及时切除故障线路,同时完成一些其他操作,如按动开关等。
2、但现有的开关设备进行操作时则需工作人员操作步骤多,部分需要使用手柄或编程程序类进行操作,存在一一选择、操作步骤长的问题,且在进行操作时的选项不够简洁明了,开关设备屏幕有大量的数字信息需要进筛选判断,而实际的操作过程中,会存在图像传递的时间误差以及操作的不够自动化,且在进行操作过程中存在机械臂的高度需要手动去遥控,基本都不与开关存在信息判断。
技术实现思路
1、本申请实施例提供了一种开关设备巡检操作机器人及其控制方法和设备,用于解决现有变电站机器人的控制方式的操作复杂的技术问题。
2、为了实现上述目的,本申请实施例提供如下技术方案:
3、一方面,提供了一种开关设备巡检操作机器人的控制方法,包括以下步骤:
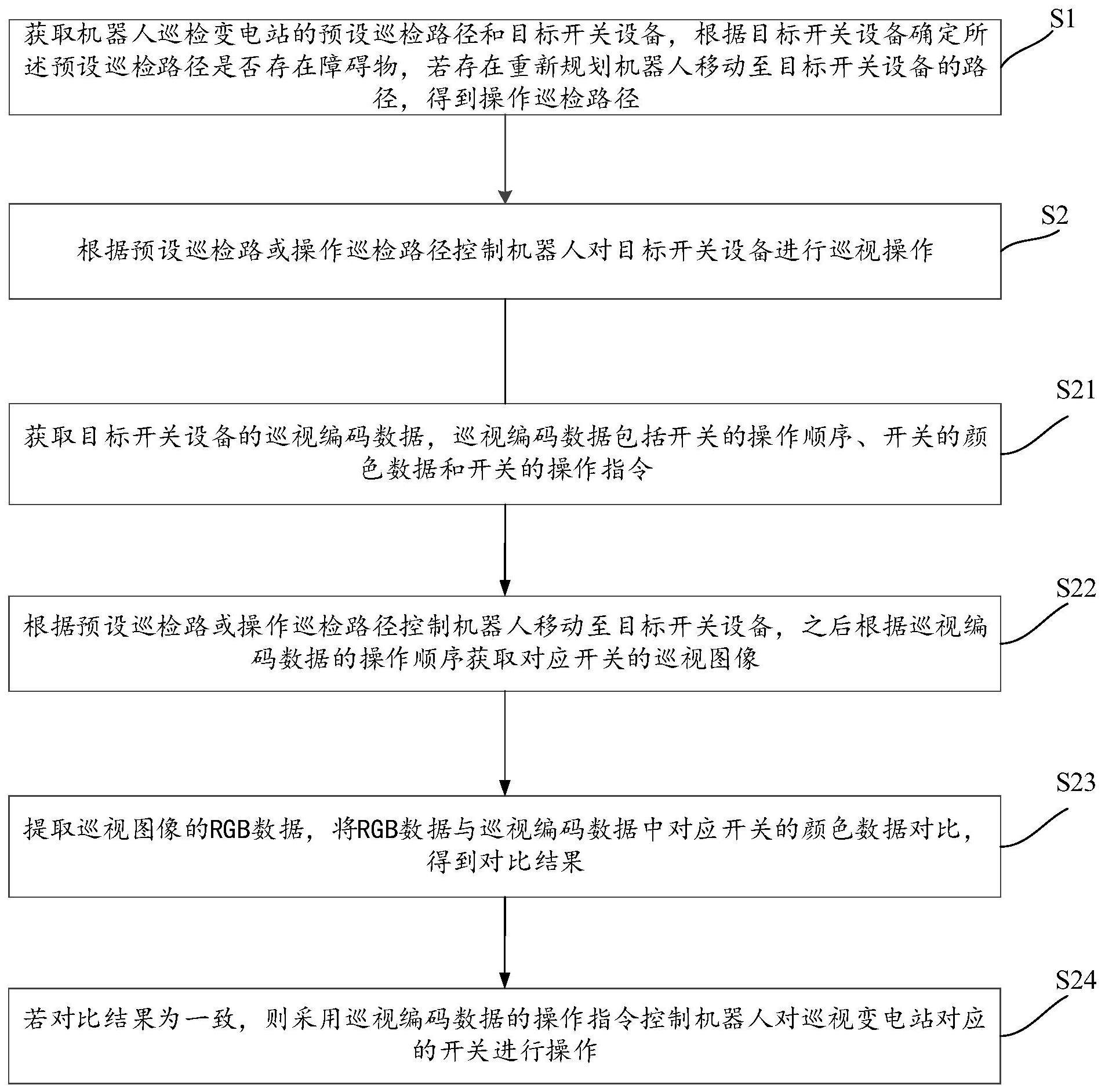
4、获取机器人巡检变电站的预设巡检路径和目标开关设备,根据所述目标开关设备确定所述预设巡检路径是否存在障碍物,若存在重新规划机器人移动至所述目标开关设备的路径,得到操作巡检路径;
5、根据所述预设巡检路或所述操作巡检路径控制机器人对所述目标开关设备进行巡视操作;
6、对所述目标开关设备进行巡视操作包括:
7、获取所述目标开关设备的巡视编码数据,所述巡视编码数据包括开关的操作顺序、开关的颜色数据和开关的操作指令;
8、根据所述预设巡检路或所述操作巡检路径控制机器人移动至所述目标开关设备,之后根据所述巡视编码数据的操作顺序获取对应开关的巡视图像;
9、提取所述巡视图像的rgb数据,将所述rgb数据与所述巡视编码数据中对应开关的颜色数据对比,得到对比结果;
10、若所述对比结果为一致,则采用所述巡视编码数据的操作指令控制机器人对所述巡视变电站对应的开关进行操作。
11、优选地,根据所述巡视编码数据的操作顺序获取对应开关的巡视图像之前包括:
12、在机器人移动过程中,通过机器人的测距雷达获取机器人与所述目标开关设备之间的移动距离,以及获取机器人与所述目标开关设备之间的巡视距离;
13、若所述移动距离等于所述巡视距离,则机器人已经移动至所述目标开关设备的巡视区域,控制机器人停止移动,同时根据所述操作顺序通过机器人获取对应开关的巡视图像。
14、优选地,采用所述巡视编码数据的操作指令控制机器人对所述巡视变电站对应的开关进行操作包括:
15、获取机器人对所述目标开关设备的操作距离和开关的中点位置;
16、控制机器人的识别元件移动至所述中点位置的正前方,以及根据所述操作距离控制机器人的执行操作模块移动至所述巡视变电站对应开关的中点位置;
17、根据所述操作指令控制机器人的执行操作模块对所述巡视变电站对应的开关进行操作。
18、优选地,控制机器人的识别元件移动至所述中点位置的正前方包括:
19、通过所述机器人的识别元件获取调整图像,从所述调整图像中得到识别元件与中点位置之间调整方向和调整数据;
20、根据所述调整方向和所述调整数据调整所述机器人的识别元件位置,直至机器人的识别元件移动至所述中点位置的正前方。
21、优选地,根据所述操作指令控制机器人的执行操作模块对所述巡视变电站对应的开关进行操作包括:
22、若所述目标开关设备的开关为旋钮开关,根据所述操作指令通过执行操作模块中执行夹的夹尖夹紧所述旋钮开关进行旋转,以使执行操作模块的限位环移动降低执行操作模块中透气槽的压强;
23、若所述目标开关设备的开关为按压式开关,根据所述操作指令通过执行操作模块中执行夹闭合伸出其夹尖按压所述按压式开关;
24、若所述目标开关设备的开关为拨动开关,根据所述操作指令通过执行操作模块中执行夹的夹尖拨动所述拨动开关。
25、另一方面,提供了一种开关设备巡检操作机器人,包括移动模块、机械臂、辅助模块、执行操作模块和控制模块,所述机械臂设置在所述移动模块上,所述辅助模块设置在所述机械臂的末端,所述执行操作模块安装在所述辅助模块上,所述控制模块按照上述所述的开关设备巡检操作机器人的控制方法控制所述移动模块、所述机械臂、所述辅助模块和所述执行操作模块工作。
26、优选地,所述执行操作模块包括安装在所述辅助模块的执行安装座,所述执行安装座上活动设置有两个执行夹,每个所述执行夹上设置有夹尖,每个所述执行夹上开设有透气槽。
27、优选地,所述夹尖上设置有限位环和套接弧形杆,每个所述执行夹上设置有用于安装所述夹尖的方槽,所述方槽上设置有与所述限位环匹配的限制槽。
28、优选地,所述辅助模块上安装具有摄像功能的识别元件。
29、再一方面,提供了一种终端设备,包括处理器以及存储器;
30、所述存储器,用于存储程序代码,并将所述程序代码传输给所述处理器;
31、所述处理器,用于根据所述程序代码中的指令执行上述所述的开关设备巡检操作机器人的控制方法。
32、从以上技术方案可以看出,本申请实施例具有以下优点:该开关设备巡检操作机器人及其控制方法和设备,该方法包括获取机器人巡检变电站的预设巡检路径和目标开关设备,根据目标开关设备确定预设巡检路径是否存在障碍物,若存在重新规划机器人移动至目标开关设备的路径,得到操作巡检路径;根据预设巡检路或操作巡检路径控制机器人对目标开关设备进行巡视操作;对目标开关设备进行巡视操作包括:获取目标开关设备的巡视编码数据,巡视编码数据包括开关的操作顺序、开关的颜色数据和开关的操作指令;根据预设巡检路或操作巡检路径控制机器人移动至目标开关设备,之后根据巡视编码数据的操作顺序获取对应开关的巡视图像;提取巡视图像的rgb数据,将rgb数据与巡视编码数据中对应开关的颜色数据对比,得到对比结果;若对比结果为一致,则采用巡视编码数据的操作指令控制机器人对巡视变电站对应的开关进行操作。该开关设备巡检操作机器人的控制方法通过巡视编码数据与识别元件获取巡视图像结合,能够根据巡视编码数据对控制机器人对巡视变电站对应的开关进行选择操作。且在实际的操作过程中,通过巡视图像的rgb数据与巡视编码数据中对应开关的颜色数据对比进行选择执行开关的确定,从而使得目标开关设备的开关能够与机器人的操作产生信息交互,更方便机器人识别目标开关设备的开关种类,避免了现有机器人与变电站之间交互时间长和操作复杂的问题,解决了现有变电站机器人的控制方式的操作复杂的技术问题。
技术特征:
1.一种开关设备巡检操作机器人的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的开关设备巡检操作机器人的控制方法,其特征在于,根据所述巡视编码数据的操作顺序获取对应开关的巡视图像之前包括:
3.根据权利要求1所述的开关设备巡检操作机器人的控制方法,其特征在于,采用所述巡视编码数据的操作指令控制机器人对所述巡视变电站对应的开关进行操作包括:
4.根据权利要求3所述的开关设备巡检操作机器人的控制方法,其特征在于,控制机器人的识别元件移动至所述中点位置的正前方包括:
5.根据权利要求1所述的开关设备巡检操作机器人的控制方法,其特征在于,根据所述操作指令控制机器人的执行操作模块对所述巡视变电站对应的开关进行操作包括:
6.一种开关设备巡检操作机器人,其特征在于,包括移动模块、机械臂、辅助模块、执行操作模块和控制模块,所述机械臂设置在所述移动模块上,所述辅助模块设置在所述机械臂的末端,所述执行操作模块安装在所述辅助模块上,所述控制模块按照如权利要求1-5任意一项所述的开关设备巡检操作机器人的控制方法控制所述移动模块、所述机械臂、所述辅助模块和所述执行操作模块工作。
7.根据权利要求6所述的开关设备巡检操作机器人,其特征在于,所述执行操作模块包括安装在所述辅助模块的执行安装座,所述执行安装座上活动设置有两个执行夹,每个所述执行夹上设置有夹尖,每个所述执行夹上开设有透气槽。
8.根据权利要求7所述的开关设备巡检操作机器人,其特征在于,所述夹尖上设置有限位环和套接弧形杆,每个所述执行夹上设置有用于安装所述夹尖的方槽,所述方槽上设置有与所述限位环匹配的限制槽。
9.根据权利要求6所述的开关设备巡检操作机器人,其特征在于,所述辅助模块上安装具有摄像功能的识别元件。
10.一种终端设备,其特征在于,包括处理器以及存储器;
技术总结
本申请涉及一种开关设备巡检操作机器人及其控制方法和设备,该方法包括获取机器人巡检变电站的预设巡检路径和目标开关设备,根据目标开关设备确定预设巡检路径是否存在障碍物重新规划操作巡检路径;根据预设巡检路或操作巡检路径控制机器人对目标开关设备进行巡视操作。该方法通过巡视编码数据与识别元件获取巡视图像结合,能够根据巡视编码数据对控制机器人对巡视变电站对应的开关进行选择操作。且在实际的操作过程中,通过巡视图像的RGB数据与巡视编码数据中对应开关的颜色数据对比进行选择执行开关的确定,从而使得目标开关设备的开关能够与机器人的操作产生信息交互,更方便机器人识别目标开关设备的开关种类。
技术研发人员:凌青
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!