机器人紧急制动方法、装置、设备及存储介质与流程
本技术涉及机器人控制,尤其涉及一种机器人紧急制动方法、装置、设备及存储介质。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,已被应用于各个工业领域之中。
2、在工业机器人运作的过程中,可能因参数设置不当或人员操作不当等原因造成一定安全隐患,现有的紧急制动方式通常为操作人员按下紧急制动按钮后驱动器立刻受控停止,从而使机器人停止运动。
3、然而,这种方式通常会给机器人带来较大的冲击和振动,对机器人各关节部件损耗较大,容易缩短机器人的使用寿命,且若在紧急情况下操作人员无法及时按下紧急制动按钮,可能会给机器人的各部件造成更大的损害。
技术实现思路
1、本技术的主要目的在于提供一种机器人紧急制动方法、装置、设备及存储介质,旨在解决现有紧急制动方式中机器人损耗较大的技术问题。
2、为实现上述目的,本技术提供一种机器人紧急制动方法,所述机器人紧急制动方法应用于机器人,所述机器人包括:至少一个关节和与各所述关节对应的驱动器,各所述驱动器用于给对应的所述关节提供动力和制动力;
3、所述机器人紧急制动方法包括:
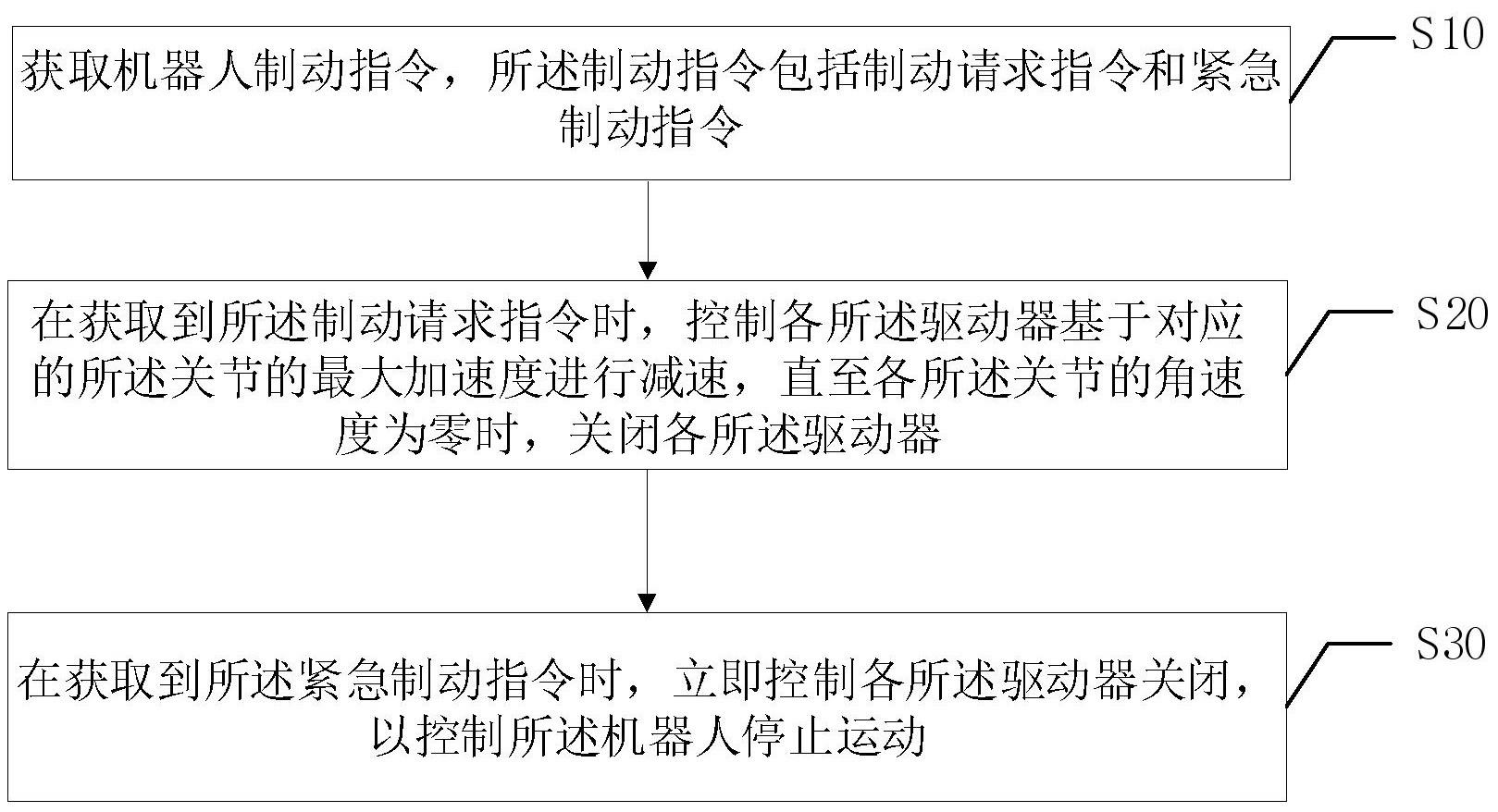
4、获取机器人制动指令,所述机器人制动指令包括制动请求指令和紧急制动指令;
5、在获取到所述制动请求指令时,控制各所述驱动器基于对应的所述关节的最大加速度进行减速,直至各所述关节的角速度为零时,关闭各所述驱动器;
6、在获取到所述紧急制动指令时,立即控制各所述驱动器关闭,以控制所述机器人停止运动。
7、可选地,在一些可行的实施例中,所述机器人还包括:与各关节对应的传感器,所述传感器用于实时检测对应关节的角速度,所述方法还包括:
8、通过各所述传感器实时获取对应的所述关节的角速度。
9、可选地,在一些可行的实施例中,所述控制各所述驱动器基于对应的所述关节的最大加速度进行减速的步骤,包括:
10、基于各所述角速度和预设的各所述关节的最大加速度,规划对应的所述关节的角速度曲线;
11、基于各所述角速度曲线分别控制对应的所述驱动器进行减速。
12、可选地,在一些可行的实施例中,在所述获取机器人制动指令的步骤之前,所述方法还包括:
13、实时获取所述机器人的运行参数;
14、根据所述运行参数判断所述机器人是否存在碰撞风险以得到判断结果,并根据所述判断结果生成机器人制动指令。
15、可选地,在一些可行的实施例中,所述机器人还包括:摄像头和与各所述驱动器对应的电流检测器,所述摄像头用于实时采集机器人四周的环境图像,各所述电流检测器用于实时检测对应驱动器的驱动电流;所述运行参数包括:环境图像和各驱动电流;所述判断结果包括:所述机器人存在碰撞风险,或者,所述机器人不存在碰撞风险;
16、所述根据所述运行参数判断所述机器人是否存在碰撞风险以得到判断结果的步骤,包括:
17、若存在一个所述驱动器的所述驱动电流发生突变,或者存在一个所述驱动器的所述驱动电流在任意预设的时间内累积的能量超出阈值,则判定所述机器人发生碰撞,即所述机器人存在碰撞风险;
18、若检测到所述环境图像中所述机器人的预设运动路线上存在其他物体,则判定所述机器人存在碰撞风险。
19、可选地,在一些可行的实施例中,所述根据所述运行参数判断所述机器人是否存在碰撞风险以得到判断结果的步骤,还包括:
20、若各所述驱动器的驱动电流均未发生突变,且各所述驱动器的所述驱动电流在任意预设的时间内累积的能量均未超出阈值,且所述环境图像中所述机器人的预设运动路线上不存在其他物体,则判定所述机器人不存在碰撞风险。
21、可选地,在一些可行的实施例中,所述根据所述判断结果生成机器人制动指令的步骤,包括:
22、若所述判断结果为所述机器人存在碰撞风险,则立即生成紧急制动指令;
23、若所述判断结果为所述机器人不存在碰撞风险,则根据预设的用户输入信息生成制动请求指令。
24、可选地,在一些可行的实施例中,所述机器人还包括:麦克风和制动按钮,所述预设的用户输入信息包括:语音信息和按钮触发信息;
25、所述根据预设的用户输入信息生成制动请求指令的步骤,包括:
26、根据所述麦克风获取到的语音信息生成制动请求指令,和/或者,根据所述制动按钮被触发时生成的按钮触发信息生成制动请求指令。
27、此外,为实现上述目的,本技术还提供一种机器人紧急制动装置,所述机器人紧急制动装置为虚拟装置,所述机器人紧急制动装置应用于机器人,所述机器人包括:至少一个关节和与各所述关节对应的驱动器,各所述驱动器用于给对应的所述关节提供动力和制动力;
28、所述机器人紧急制动装置包括:
29、指令获取模块,用于获取机器人制动指令,所述机器人制动指令包括制动请求指令和紧急制动指令;
30、制动请求模块,用于在获取到所述制动请求指令时,控制各所述驱动器基于对应的所述关节的最大加速度进行减速,直至各所述关节的角速度为零时,关闭各所述驱动器;
31、紧急制动模块,用于在获取到所述紧急制动指令时,立即控制各所述驱动器关闭,以控制所述机器人停止运动。
32、此外,为实现上述目的,本技术还提供一种机器人紧急制动设备,所述机器人紧急制动设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机器人紧急制动程序,所述机器人紧急制动程序被所述处理器执行时实现如上述的机器人紧急制动方法的步骤。
33、本技术还提供一种存储介质,所述存储介质上存储有机器人紧急制动程序,所述机器人紧急制动程序被处理器执行时实现如上述的机器人紧急制动方法的步骤。
34、本技术提供一种机器人紧急制动方法、装置、设备及存储介质,机器人紧急制动方法应用于机器人,机器人包括:各关节和与各所述关节对应的驱动器,各所述驱动器用于给对应的所述关节提供动力和制动力;所述机器人紧急制动方法包括:获取机器人制动指令,所述机器人制动指令包括制动请求指令和紧急制动指令;在获取到所述制动请求指令时,控制各所述驱动器基于对应的所述关节的最大加速度进行减速,直至各所述关节的角速度为零时,关闭各所述驱动器;在获取到所述紧急制动指令时,立即控制各所述驱动器关闭,以控制所述机器人停止运动。
35、相比于现技术中由操作人员按下紧急制动按钮后驱动器立刻受控停止的技术手段,本技术机器人紧急制动方法在获取到制动请求指令时,控制各关节基于各关节的最大加速度进行减速,直至各关节的角速度为零,在获取到紧急制动指令时,立即控制各驱动器关闭,以控制机器人停止运动。
36、如此,本技术基于上述基于不同的制动指令采用不同的制动方式的方法,与现有的由操作人员按下紧急制动按钮后驱动器立刻受控停止的方式相比,本技术机器人紧急制动方法能够在紧急程度一般的情况下,控制各关节以最大速度进行减速,直至各关节角速度为零,在非常紧急的情况下(例如机器存在碰撞风险或危害到人身安全),立即控制各驱动器关闭,在保障人员安全的前提下最大限度地减小机器人的损耗。
- 还没有人留言评论。精彩留言会获得点赞!