一种六关节工业机器人的制作方法
本发明涉及工业机器人,具体为一种六关节工业机器人。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。关节机器人,也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。按照轴的数量可以划分成五关节和六关节机器人,六关节机器人在使用过程中的范围比较大。
2、但是目前的六关节工业机器人只具备一种功能,比如只具备打磨、亦或者拿取产品等,不具备多种功能,进而会导致其使用范围有限,实用性较低。因此,发明一种六关节工业机器人。
技术实现思路
1、鉴于上述和/或现有一种六关节工业机器人中存在的问题,提出了本发明。
2、因此,本发明的目的是提供一种六关节工业机器人,能够解决上述提出现有的问题。
3、为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
4、一种六关节工业机器人,其包括:
5、用于对产品进行打磨的打磨组件;
6、用于对产品进行钻孔的钻孔组件;
7、用于对产品进行拿取的夹具组件;
8、用于对打磨组件、钻孔组件和夹具组件的位置进行调节的调节组件,且调节组件上设有打磨组件、钻孔组件和夹具组件。
9、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述调节组件包括:
10、第一旋转组件;
11、机械手臂,所述机械手臂设在第一旋转组件上;
12、第二旋转组件,所述第二旋转组件设在机械手臂上,且第二旋转组件上设有打磨组件、钻孔组件和夹具组件。
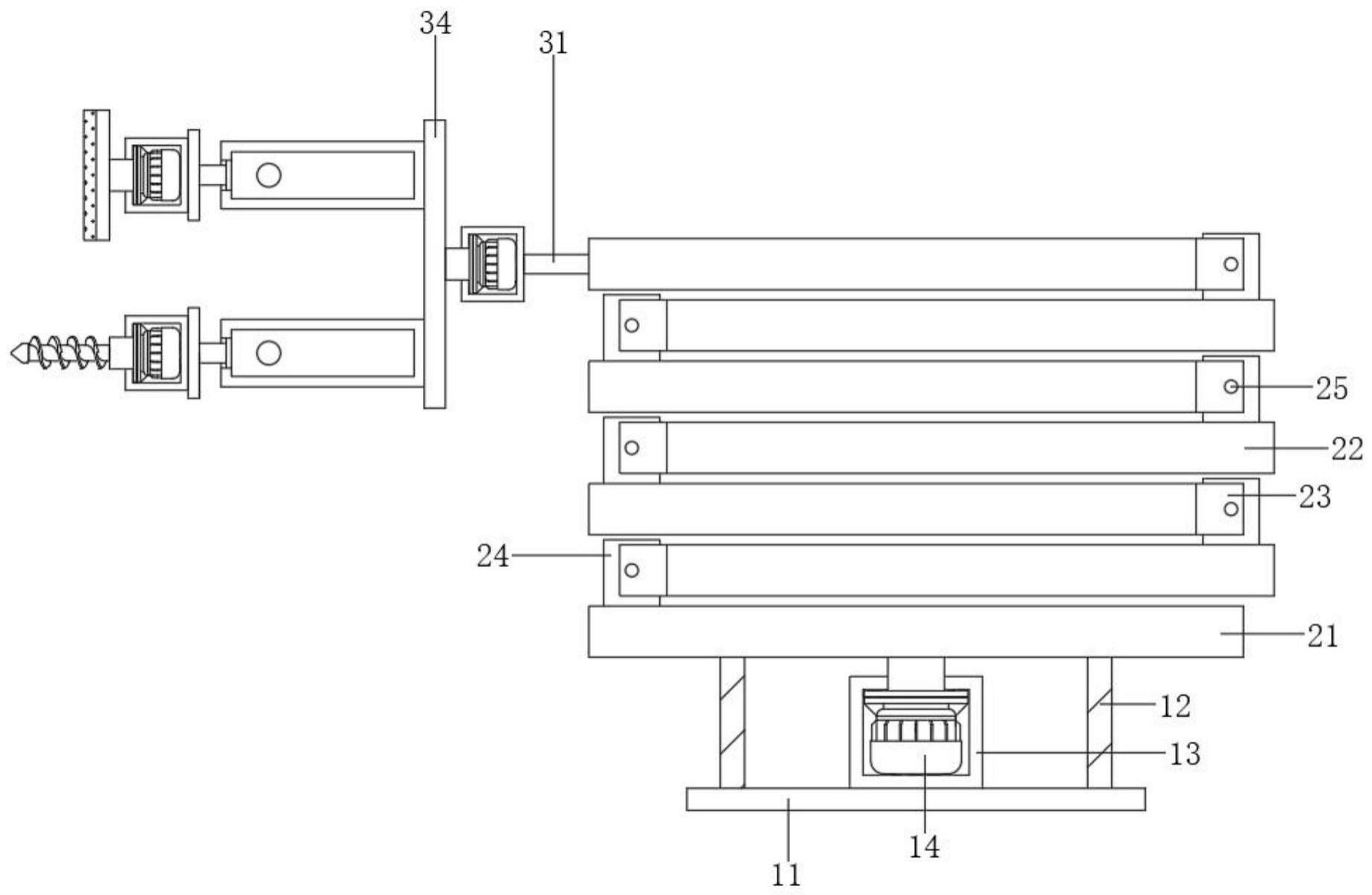
13、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述第一旋转组件包括:
14、底板;
15、空心管,所述空心管固定安装在底板的顶部上;
16、位于空心管内腔的第一箱体,所述第一箱体固定安装在底板的顶部上;
17、第一伺服电机,所述第一伺服电机固定安装在第一箱体的内壁上;
18、圆板,所述圆板固定安装在第一伺服电机的输出轴上,且圆板的底部与空心管相接触,所述圆板的顶部安装机械手臂。
19、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述机械手臂是由六组活动杆首尾相连所形成的,且六组活动杆呈s形排列,每两组所述活动杆的首尾端均通过连接组件连接在一起,且最前一组的活动杆通过连接组件连接在圆板上,最后一组所述活动杆上安装第二旋转组件。
20、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述连接组件包括:
21、连接块,所述连接块固定安装在连接块的一端上;
22、侧板,所述连接块的另一端和所述圆板的顶部均固定安装两组侧板;
23、转轴,所述转轴通过轴承转动连接在两组侧板之间,且转轴上固定安装连接块;
24、第一步进电机,所述第一步进电机固定安装在一组侧板上,且第一步进电机的输出轴固定安装转轴。
25、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述第二旋转组件包括:
26、支撑杆,所述支撑杆固定安装在最后一组活动杆上;
27、第二箱体,所述第二箱体固定安装在支撑杆的一端上;
28、第二伺服电机,所述第二伺服电机固定安装在第二箱体的内壁上;
29、第一旋转板,所述第二伺服电机的输出轴固定安装第一旋转板,且第一旋转板上安装打磨组件、钻孔组件和夹具组件。
30、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述打磨组件包括:
31、第一液压缸,所述第一液压缸固定安装在第一旋转板上;
32、第一连接板,所述第一液压缸的输出端通过活塞杆固定安装第一连接板;
33、第二箱体,所述第二箱体固定安装在第一连接板上;
34、第二伺服电机,所述第二伺服电机固定安装在第二箱体的内壁上;
35、第二旋转板,所述第二伺服电机的输出轴固定安装第二旋转板;
36、打磨盘,所述打磨盘固定安装在第二旋转板的一侧上。
37、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述钻孔组件包括:
38、第二液压缸,所述第二液压缸固定安装在第一旋转板上;
39、第三旋转板,所述第二液压缸的输出端通过活塞杆固定安装第三旋转板;
40、第三箱体,所述第三箱体固定安装在第三旋转板上;
41、第三伺服电机,所述第三伺服电机固定安装在第三箱体的内壁上;
42、钻头,所述钻头固定安装在第三伺服电机的输出轴上。
43、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述夹具组件包括:
44、第三液压缸,所述第三液压缸固定安装在第一旋转板上;
45、支撑板,所述第三液压缸的输出端通过活塞杆固定安装支撑板;
46、固定板,所述支撑板的一侧两端均固定安装固定板。
47、作为本发明所述的一种六关节工业机器人的一种优选方案,其中:所述夹具组件还包括:
48、第四液压缸,每组所述固定板中均固定安装第四液压缸;
49、挤压板,所述第四液压缸的输出端通过活塞杆固定安装挤压板。
50、与现有技术相比:
51、1.通过设置用于对产品进行打磨的打磨组件、用于对产品进行钻孔的钻孔组件和用于对产品进行拿取的夹具组件,进而能够解决目前的六关节工业机器人只具备一种功能的问题,从而能够提高六关节工业机器人的实用范围,实用性高;
52、通过设置对打磨组件、钻孔组件和夹具组件的位置进行调节的调节组件,进而能够使高六关节工业机器人灵活度高,而且,在不使用时,能够进行收起来,在一定程度上减少了占用空间。
技术特征:
1.一种六关节工业机器人,其特征在于,包括:
2.根据权利要求1所述的一种六关节工业机器人,其特征在于,所述调节组件包括:
3.根据权利要求2所述的一种六关节工业机器人,其特征在于,所述第一旋转组件包括:
4.根据权利要求3所述的一种六关节工业机器人,其特征在于,所述机械手臂是由六组活动杆(22)首尾相连所形成的,且六组活动杆(22)呈s形排列,每两组所述活动杆(22)的首尾端均通过连接组件连接在一起,且最前一组的活动杆(22)通过连接组件连接在圆板(21)上,最后一组所述活动杆(22)上安装第二旋转组件。
5.根据权利要求4所述的一种六关节工业机器人,其特征在于,所述连接组件包括:
6.根据权利要求4所述的一种六关节工业机器人,其特征在于,所述第二旋转组件包括:
7.根据权利要求6所述的一种六关节工业机器人,其特征在于,所述打磨组件包括:
8.根据权利要求6所述的一种六关节工业机器人,其特征在于,所述钻孔组件包括:
9.根据权利要求6所述的一种六关节工业机器人,其特征在于,所述夹具组件包括:
10.根据权利要求9所述的一种六关节工业机器人,其特征在于,所述夹具组件还包括:
技术总结
本发明公开的属于工业机器人技术领域,具体为一种六关节工业机器人,包括:用于对产品进行打磨的打磨组件,用于对产品进行钻孔的钻孔组件,用于对产品进行拿取的夹具组件,用于对打磨组件、钻孔组件和夹具组件的位置进行调节的调节组件,且调节组件上设有打磨组件、钻孔组件和夹具组件,所述调节组件包括:第一旋转组件,所述机械手臂设在第一旋转组件上,所述第二旋转组件设在机械手臂上,本发明通过设置用于对产品进行打磨的打磨组件、用于对产品进行钻孔的钻孔组件和用于对产品进行拿取的夹具组件,进而能够解决目前的六关节工业机器人只具备一种功能的问题,从而能够提高六关节工业机器人的实用范围,实用性高。
技术研发人员:沈叙,刘海强,苏颖娜,沈洋
受保护的技术使用者:常州伟鲲工业自动化设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!