基于预测的机械臂路径规划方法、装置、电子设备及介质
本发明涉及机器人,尤其是涉及一种基于预测的机械臂路径规划方法、装置、电子设备及介质。
背景技术:
1、路径规划是机器人学的核心问题之一。路径规划可以使机器人在工作空间中规划出一条可行路径。经过多年发展,工业机器人运动规划已经较为成熟,在分拣、焊接、磨削等领域应用广泛。但是,协作机器人通常工作在复杂环境中,面对动态障碍物(工作台等)和动态障碍物(协作者等),需要适合的路径规划方法,保证机器人顺利完成任务。避障就是当协作场景检测到现障碍物时,机械臂能够以最快的时间和最小的成本完成躲避障碍物的动作,并且在成功避开障碍物之后朝向目标点继续前进。人工势场法具有算法结构简单明了、反应速度快捷等优势,因此该算法在机械臂的避障路径规划领域中得到了广泛的应用,并逐渐成为主流的避障算法。但是,当人工势场法应用于机械臂避障时会存在两个问题,目标不可达问题和局部极小值问题。
2、现有技术中,研究人员解决对局部极小值问题主要通过设置虚拟引导点(包括虚拟目标点和障碍物)引导机械臂逃离局部极小值点。有人提出在局部极小值点处随机产生一个子目标点,子目标点可以产生一个吸引力使机器人逃出局部极小点位置。除了设置子目标点外,还可以设置虚拟障碍点,据机器人和目标点连线与障碍物两侧的夹角不同,分成三种情况动态添加虚拟障碍点。现有技术可以解决局部极小值问题,但是随机性大,机械臂末端规划的运动轨迹不可控,在人机交互、协作中用户的安全感不强、协作效率不高。中国专利cn115502961a公开了一种基于人体手臂运动信息预测的人机在线避障方法。该方法通过获取人体手臂关键点坐标,获取人体手臂运动信息,将该信息输入lstm-bp模型进行人体手臂运动的预测,其中lstm-bp模型包括长短期记忆神经网络和反向传播神经网络,将人体手臂作为障碍物,根据人体手臂运动的预测信息获取斥力场,将机器人的移动终点作为目标点,根据目标点获取引力场,从而获取机器人的末端位姿,控制机器人运动。该专利能够提升人机交互的安全性,但预测精度低,计算速度慢。因此,在机械臂路径规划中如何在保证安全性的同时提高人机协作效率成为本领域需要解决的问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在预测精度低、计算速度慢的缺陷而提供一种基于预测的机械臂路径规划方法、装置、电子设备及介质。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供一种基于预测的机械臂路径规划方法,该方法包括以下步骤:
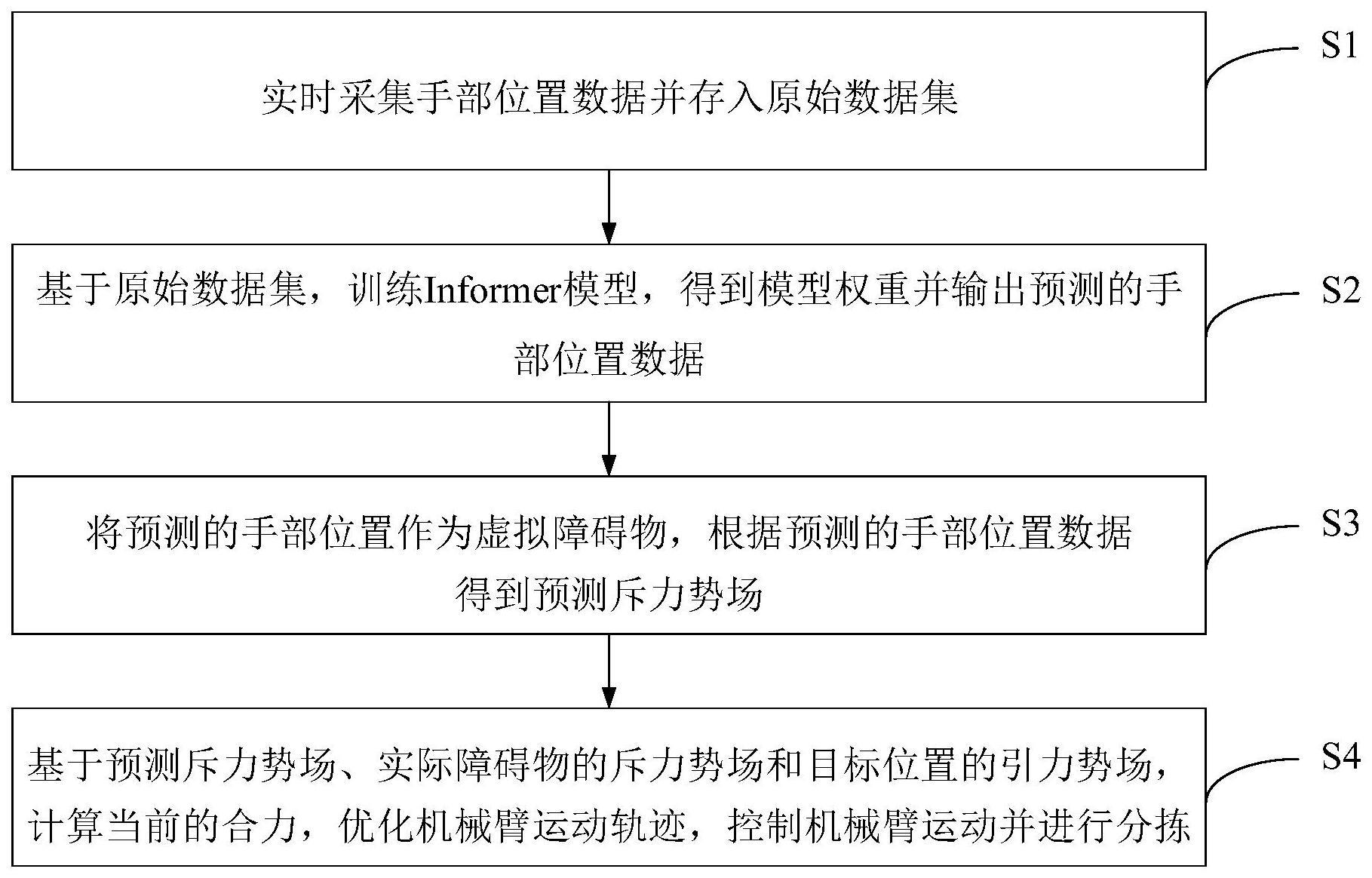
4、s1,实时采集手部位置数据并存入原始数据集,所述原始数据集还包括机械臂当前位置数据、目标位置数据和实际障碍物位置数据;
5、s2,基于原始数据集,训练informer模型,得到模型权重并输出预测的手部位置数据;
6、s3,将预测的手部位置作为虚拟障碍物,根据预测的手部位置数据得到预测斥力势场;
7、s4,基于预测斥力势场、实际障碍物的斥力势场和目标位置的引力势场,计算当前的合力,优化机械臂运动轨迹,控制机械臂运动并进行分拣;
8、其中,所述目标位置为机械臂运动的终点。
9、优选地,所述s2中训练informer模型的过程包括:
10、s21,整理并预处理采集的手部位置数据,并存入原始数据集;
11、s22,将原始数据集划分为训练集、验证集和测试集,获取数据中包含的时间序列输入特征;
12、s23,基于训练集数据的时间序列输入特征,选取损失函数,训练informer模型,并前向传播计算预测结果;
13、s24,计算并监控训练过程中的损失值,通过反向传播优化损失函数,更新informer模型的权重参数;
14、s25,输出预测的手部位置数据;
15、其中,informer模型的构建包括编码器和解码器,验证集数据用于选择训练时机,避免预测的手部位置数据的过拟合;测试集数据用于验证informer模型在实际数据上的预测能力。
16、优选地,所述预测斥力的表达式为:
17、
18、其中,kp是斥力系数,p1(x)表示机械臂与预测障碍物之间的距离,pp是一个阈值,用于确定预测障碍物对机械臂的影响范围。
19、优选地,所述实际障碍物的斥力表达式为:
20、
21、其中,kr是斥力系数,p2(x)表示机械臂与实际障碍物之间的距离,po是一个阈值,用于确定实际障碍物对机械臂的影响范围;
22、所述目标位置的引力表达式为:
23、
24、其中,ka是引力系数,x表示机械臂当前的位置,xg表示目标的位置,uattr(x)表示目标位置的引力势场。
25、优选地,所述s4中优化机械臂运动轨迹的过程包括,利用笛卡尔空间路径规划为机械臂末端规划直观、可控的运动路径。
26、优选地,所述原始数据集还包括头部的姿态数据,用于训练informer模型并预测手部位置。
27、优选地,所述实时采集手部位置数据的过程包括,使用采集频率为每秒30帧的深度相机采集手部位置数据。
28、根据本发明的第二方面,提供一种基于预测的机械臂路径规划装置,该装置用于实现所述的方法,包括手部位置数据采集模块、informer模型训练模块、预测斥力获取模块和运动轨迹优化模块;所述手部位置数据采集模块,用于实时采集手部位置数据并存入原始数据集;所述informer模型训练模块,用于利用原始数据集训练informer模型,得到模型权重并输出预测的手部位置数据;所述预测斥力获取模块,用于将预测的手部位置作为虚拟障碍物,根据预测的手部位置数据得到预测斥力势场,进而得到预测斥力;所述运动轨迹优化模块,用于基于预测斥力势场、实际障碍物的斥力势场和目标位置的引力势场,计算当前的合力,优化机械臂运动轨迹,控制机械臂运动并进行分拣。
29、根据本发明的第三方面,提供一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
30、根据本发明的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
31、与现有技术相比,本发明具有以下有益效果:
32、1、本发明通过informer模型预测的手部位置信息,从而增加预测斥力,能够通过更高的预测精度和更短的训练时间进行障碍物预测,能够提高机械臂运动的灵活性和避障能力,实时性更佳,准确度更高,既能提高路径规划的安全性,又能提高模型训练的效率,进而提高人机协作效率;
33、2、本发明将预测斥力引入传统人工势场法,与改进型斥力函数相结合,解决了传统人工势场法的局部极小值问题和障碍附近目标不可达问题;
34、3、本发明利用informer模型的长序列数据处理能力,有助于帮机械臂做出更长期的路径规划,提高机械臂的运动平滑度和动态避障能力。
- 还没有人留言评论。精彩留言会获得点赞!