一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人
本发明一般涉及外骨骼,具体涉及一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人。
背景技术:
1、外骨骼助力机器人在军事和医疗方面已经有了广泛应用,但在煤炭行业应用尚不广泛。现阶段煤矿井下巷道建设、物资搬运以及装备维修过程中,仍然存在大量需要矿工直接介入才能完成的负重作业工作,如能为其配备合适的外骨骼助力设备,必将有效地减少工人的体能消耗、提高工作效率、提高矿井经济效益和降低生产事故。
2、现如今已经投入矿用的外骨骼主要分为有源外骨骼与无源外骨骼。其中又具体分为上肢、腰部、下肢三个模块,每个模块之间相互独立,为使用者提供对应的助力。目前,矿用外骨骼存在许多问题。例如,无源外骨骼和单电机外骨骼在矿用的场景下的助力效果较弱,难以满足实际的矿用需求。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人。
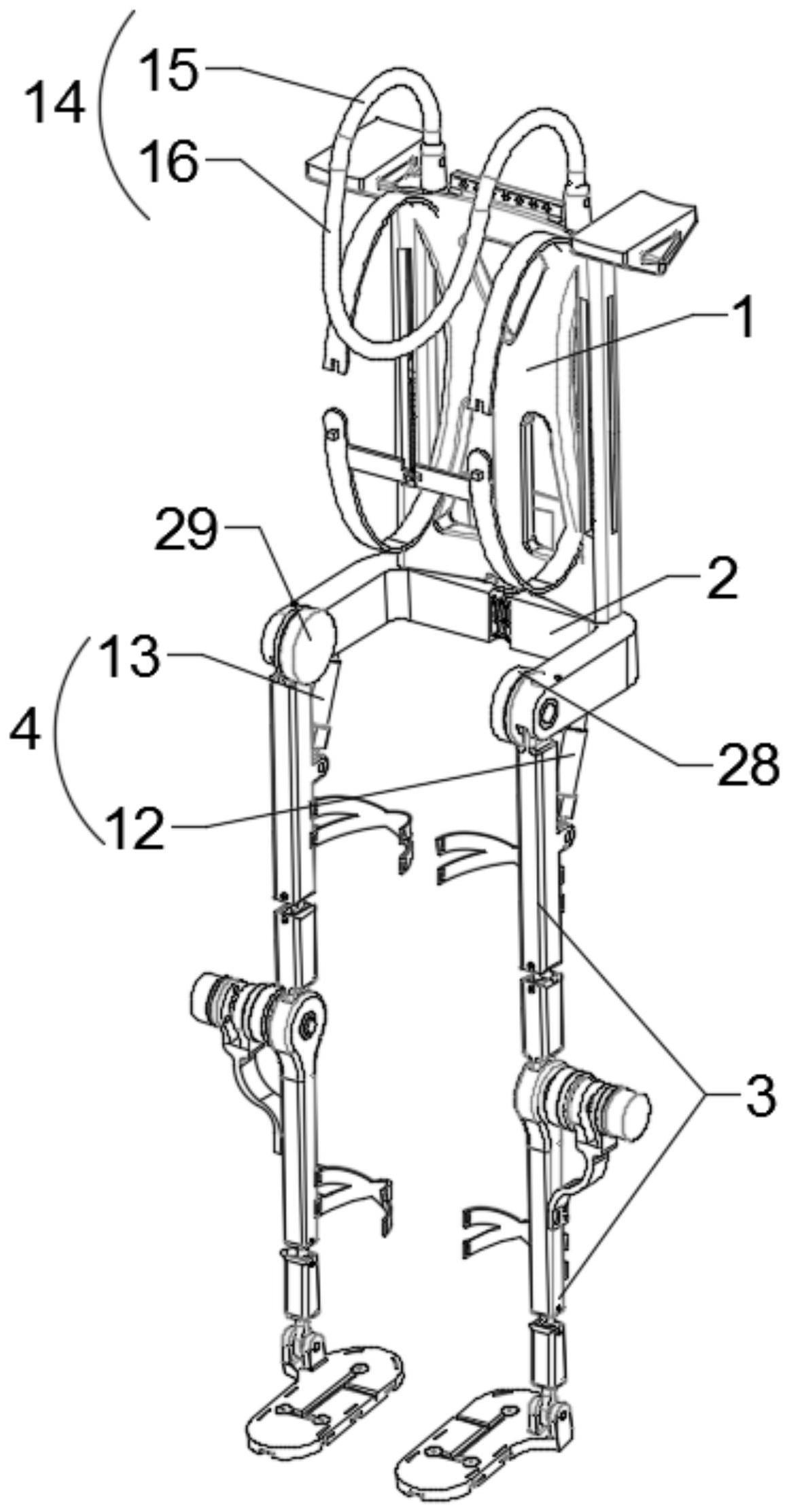
2、本申请提供一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,包括:
3、背板;
4、髋关节组件,所述髋关节组件包括左髋与右髋;所述左髋与右髋均安装在所述背板上;
5、下肢组件,所述下肢组件包括左下肢与右下肢;所述左下肢与左髋可转动连接,所述右下肢与右髋可转动连接;左下肢与右下肢的旋转轴线均平行于第一方向;
6、第一驱动装置,所述第一驱动装置的一端与所述左下肢连接,另一端与所述左髋连接;所述第一驱动装置用于为所述左下肢与左髋之间提供支持物料重量的动力;
7、第二驱动装置,所述第二驱动装置的一端与所述右下肢连接,另一端与所述右髋连接;所述第二驱动装置用于为所述右下肢与右髋之间提供支持物料重量的动力;
8、所述第一驱动装置、左髋与左下肢之间,以及所述第二驱动装置、右髋与右下肢之间均形成三角形。
9、根据本发明提供的技术方案,所述背板靠近所述髋关节组件的一侧的边缘处固定安装有两个限位凸起;
10、所述左髋与右髋之间安装有伸缩组件;所述左髋与右髋靠近所述背板的一侧沿第一方向分别开设有滑动槽,两所述限位凸起分别设置在两所述滑动槽内且能沿所述滑动槽产生相对滑动。
11、根据本发明提供的技术方案,所述背板上还安装有悬挂组件,所述悬挂组件包括:
12、支撑管,所述支撑管的一端与所述背板铰接;所述支撑管呈弧形;
13、悬挂管,所述悬挂管呈弧形;
14、绳索,所述绳索依次穿过支撑管与悬挂管;所述绳索的两端均与所述背板连接。
15、根据本发明提供的技术方案,所述悬挂组件还包括:
16、收线组件,所述收线组件安装在所述背板上;所述绳索的一端与所述背板固定连接,另一端与收线组件连接;所述收线组件用于收紧或放出所述绳索。
17、根据本发明提供的技术方案,所述收线组件包括:
18、绞盘,所述绞盘固定安装在所述背板上;所述绞盘具有旋转轴与限位齿;
19、手柄,所述手柄与所述绞盘的旋转轴固定连接,用于带动所述绞盘旋转;
20、卡紧销,所述卡紧销可滑动安装在所述背板上用于与所述限位齿抵接,对所述绞盘进行限位;
21、所述绳索的一端与背板上的线栓固定连接,所述绳索穿过所述支撑管与悬挂管缠绕在所述旋转轴上,且与所述旋转轴固定连接。
22、根据本发明提供的技术方案,所述左下肢包括:
23、左大腿外骨骼,所述左大腿外骨骼包括第一左大腿外骨骼与第二左大腿外骨骼;所述第一左大腿外骨骼的一端与所述左髋可转动连接,所述第一左大腿外骨骼与第二左大腿外骨骼之间连接有双向螺栓;
24、左小腿外骨骼,所述左小腿外骨骼包括第一左小腿外骨骼与第二左小腿外骨骼;所述第一左小腿外骨骼的一端与所述第二左大腿外骨骼可转动连接,所述第一左小腿外骨骼与第二左小腿外骨骼之间连接有双向螺栓;
25、根据本发明提供的技术方案,所述右下肢包括:
26、右大腿外骨骼,所述右大腿外骨骼包括第一右大腿外骨骼与第二右大腿外骨骼;所述第一右大腿外骨骼的一端与所述右髋可转动连接,所述第一右大腿外骨骼与第二右大腿外骨骼之间连接有双向螺栓;
27、右小腿外骨骼,所述右小腿外骨骼包括第一右小腿外骨骼与第二右小腿外骨骼;所述第一右小腿外骨骼的一端与所述第二右大腿外骨骼可转动连接,所述第一右小腿外骨骼与第二右小腿外骨骼之间连接有双向螺栓。
28、根据本发明提供的技术方案,所述第一左小腿外骨骼的一端与所述第二左大腿外骨骼的连接处安装有第三驱动装置,用于为所述第一左小腿外骨骼与第二左大腿外骨骼的相对转动助力;
29、所述左下肢与左髋的连接处安装有第五驱动装置,用于为所述左下肢与左髋的相对转动助力。
30、根据本发明提供的技术方案,所述第一右小腿外骨骼的一端与所述第二右大腿外骨骼的连接处安装有第四驱动装置,同于为所述第一右小腿外骨骼与所述第二右大腿外骨骼的相对转动助力;
31、所述右下肢与右髋的连接处安装有第六驱动装置,用于为所述右下肢与右髋的相对转动助力。
32、根据本发明提供的技术方案,所述下肢组件还包括:
33、足底件,所述足底件设有两个且分别与左下肢与右下肢可转动连接;所述足底件上安装有压力传感器。
34、本申请的有益效果在于:
35、通过背板、第一驱动装置、第二驱动装置、左、右下肢传递至地面,完成搬运物料的功能。所述髋关节组件包括左髋与右髋;所述左髋与右髋均安装在所述背板上。通过在左下肢与左髋之间在原有电机外额外增设第一驱动装置,右下肢与右髋之间同样增设第二驱动装置。所述第一驱动装置、左髋与左下肢之间,以及所述第二驱动装置、右髋与右下肢之间均形成三角形。利用三角形具有稳定性的特点,第一驱动装置和第二驱动装置的为髋关节组件与下肢之间提供额外的助力,进而使外骨骼在矿用场景下能够提供足够支持物料重量的动力,满足矿用需求。
技术特征:
1.一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,包括:
2.根据权利要求1所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述背板(1)靠近所述髋关节组件(2)的一侧的边缘处固定安装有两个限位凸起(5);
3.根据权利要求1所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述背板(1)上还安装有悬挂组件(14),所述悬挂组件(14)包括:
4.根据权利要求3所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述悬挂组件(14)还包括:
5.根据权利要求4所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述收线组件(18)包括:
6.根据权利要求1所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述左下肢(10)包括:
7.根据权利要求1所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述右下肢(11)包括:
8.根据权利要求6所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述第一左小腿外骨骼(201)的一端与所述第二左大腿外骨骼(192)的连接处安装有第三驱动装置(24),用于为所述第一左小腿外骨骼(201)与第二左大腿外骨骼(192)的相对转动助力;
9.根据权利要求7所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述第一右小腿外骨骼(221)的一端与所述第二右大腿外骨骼(212)的连接处安装有第四驱动装置(25),同于为所述第一右小腿外骨骼(221)与所述第二右大腿外骨骼(212)的相对转动助力;
10.根据权利要求1所述的一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,其特征在于,所述下肢组件(3)还包括:
技术总结
本发明提供一种抱挂兼具肩扛式物料搬运的矿用外骨骼机器人,包括:背板、髋关节组件、左下肢、右下肢、第一驱动装置与第二驱动装置。通过背板、第一驱动装置、第二驱动装置、左、右下肢传递至地面,完成搬运物料的功能。所述髋关节组件包括左髋与右髋;所述左髋与右髋均安装在所述背板上。通过在左下肢与左髋之间在原有电机外额外增设第一驱动装置,右下肢与右髋之间同样增设第二驱动装置。所述第一驱动装置、左髋与左下肢之间,以及所述第二驱动装置、右髋与右下肢之间均形成三角形。利用三角形具有稳定性的特点,第一驱动装置和第二驱动装置的为髋关节组件与下肢之间提供额外的助力,进而使外骨骼在矿用场景下能够提供足够支持物料重量的动力,满足矿用需求。
技术研发人员:陈勇,武振,赵慧杰,黄健利,薛佳,刘启明,许光杰,陈俊霖,李涛,张俊飞
受保护的技术使用者:河北工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!